
ในบทเรียนก่อนหน้านี้คุณได้เรียนรู้เกี่ยวกับการเคลื่อนที่สัมพัทธ์และวิธีการเปรียบเทียบกับการเคลื่อนที่สัมบูรณ์ เมื่อท่านผ่านบทเรียนท่านถูกขอให้คาดการณ์ว่าแขนหุ่นยนต์ 6 แกนจะเคลื่อนที่อย่างไรเมื่อมีการดำเนินโครงการ นี่คือตัวอย่างของการอ่านโค้ด
ในบทเรียนนี้ท่านจะได้ฝึกการอ่านรหัสเพื่อพิจารณาว่าจะเกิดอะไรขึ้นเมื่อมีการดำเนินโครงการ

การอ่านรหัสคืออะไร?
เช่นเดียวกับการเขียนโค้ดการอ่านโค้ดเป็นทักษะพื้นฐานสำหรับนักเขียนโปรแกรม โปรแกรมเมอร์มักจะต้องอ่านและทำความเข้าใจโค้ดที่เขียนโดยผู้อื่นไม่ว่าจะเป็นการแก้ไขปัญหาในโค้ดรหัสรีวิวหรือเรียนรู้จากโปรเจกต์ที่มีอยู่ คุณได้อ่านโค้ดทุกครั้งที่คุณดูโปรเจกต์และทำการคาดการณ์ว่าโปรเจกต์นั้นจะทำอะไรในสมุดบันทึกวิศวกรรมของคุณ ตอนนี้คุณจะฝึกทักษะนี้อย่างตั้งใจมากขึ้น ในโปรเจกต์ในบทเรียนนี้สิ่งสำคัญคือต้องดูว่าโค้ดใช้การเคลื่อนที่สัมบูรณ์หรือสัมพัทธ์หรือไม่และสิ่งนี้ส่งผลกระทบต่อสิ่งที่วาดบนไฟล์แนบไวท์บอร์ดอย่างไร
การอ่านรหัสในโครงการ A
มีเครื่องมือมากมายที่สามารถใช้เพื่อช่วยคุณกำหนดสิ่งที่จะเกิดขึ้นในโครงการได้ การใช้สมุดบันทึกวิศวกรรมของคุณเพื่อดูพฤติกรรมของหุ่นยนต์อาจเป็นเครื่องมือที่มีประโยชน์ในการเริ่มอ่านรหัส เราจะดำเนินการตามขั้นตอนนี้ในขณะที่เราอ่านรหัสสำหรับโครงการ A
บันทึกโครงการนี้ลงในสมุดบันทึกวิศวกรรมของคุณ ซึ่งสามารถทำได้โดยการเขียนขั้นตอนตามลำดับหรือเพิ่มภาพรหัสลงในสมุดบันทึกของคุณโดยตรง
ก่อนที่จะเริ่มขั้นตอนในการอ่านรหัสให้คาดการณ์ว่าแขน 6 แกนจะทำอะไรเมื่อดำเนินโครงการ คุณจะกลับไปที่การคาดการณ์นี้หลังจากเสร็จสิ้นกระบวนการอ่านรหัสนี้

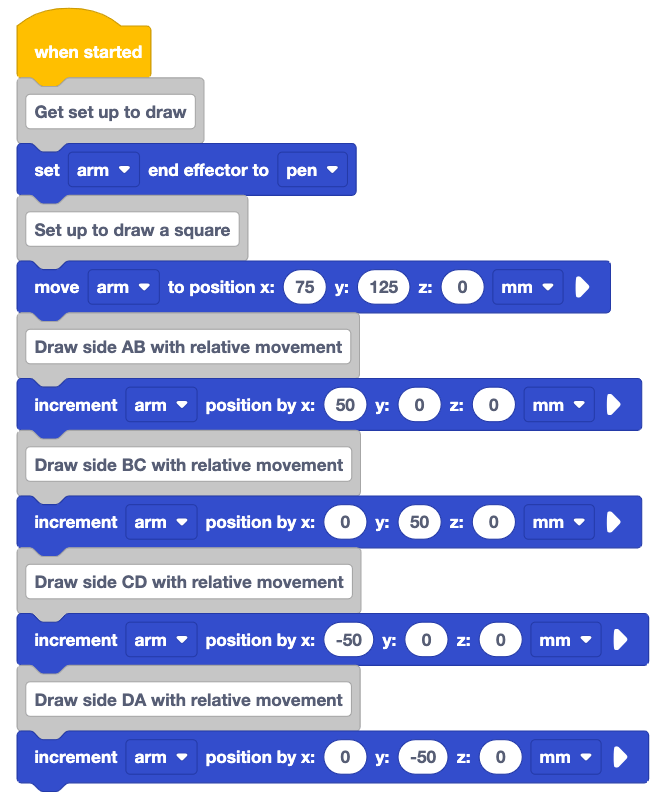
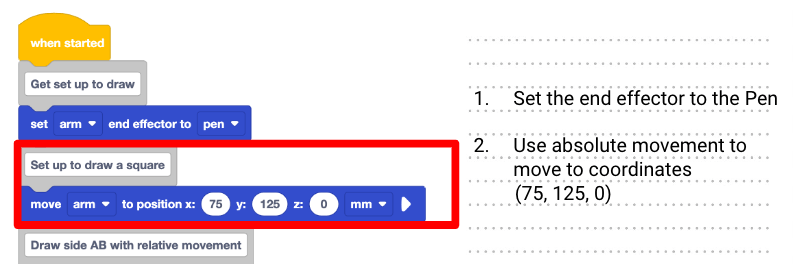
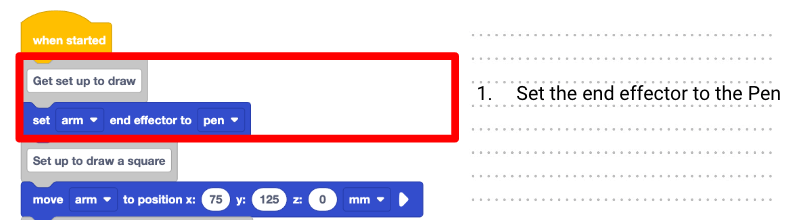
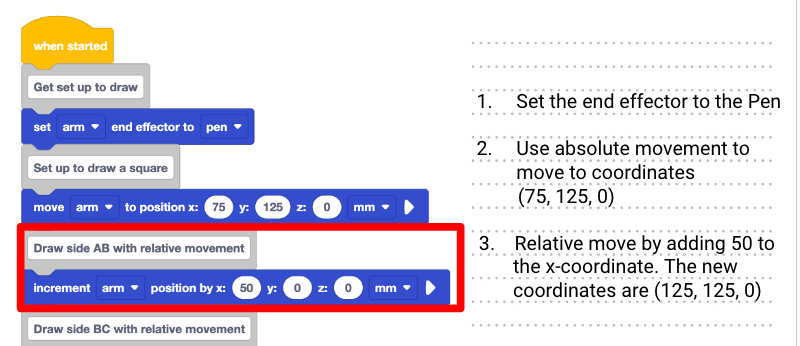
หากต้องการอ่านโค้ดให้เริ่มต้นที่จุดเริ่มต้นของโปรเจกต์ เมื่อมองไปที่บล็อกแรกให้เขียนพฤติกรรมที่เกี่ยวข้องกับบล็อกนั้นลงในสมุดบันทึกวิศวกรรมของคุณ นี่อาจมีลักษณะคล้ายกับภาพที่แสดงที่นี่
ในขณะที่คุณอ่านรหัสคุณจะต้องดูอย่างใกล้ชิดที่แต่ละบล็อกเพื่อตรวจสอบว่าแกนแขน 6 แกนจะใช้การเคลื่อนไหวแบบสัมบูรณ์หรือแบบสัมพัทธ์
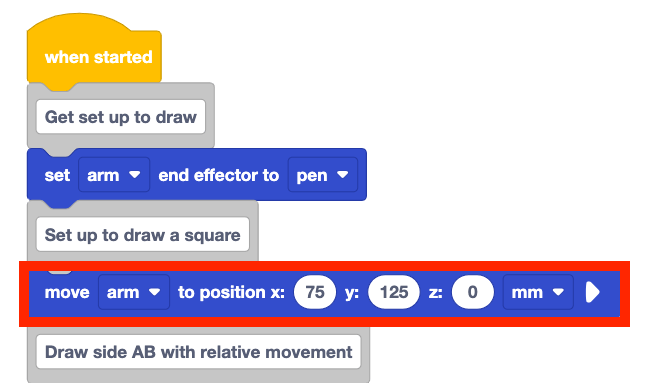
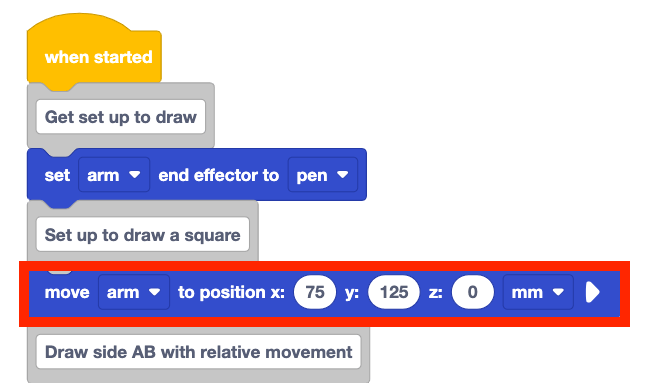
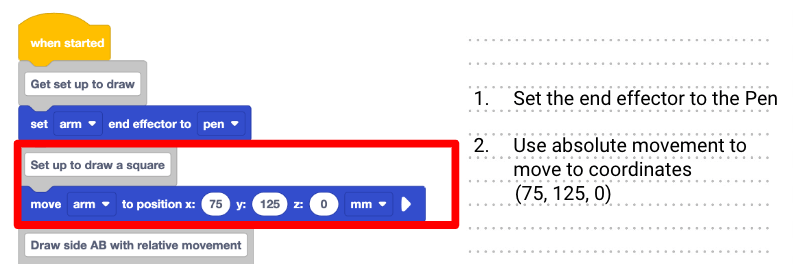
ในโครงการนี้บล็อกการเคลื่อนไหวแรกคือบล็อกการ ย้ายไป ยังตำแหน่ง โปรดทราบว่าแขน 6 แกนจะใช้การเคลื่อนที่สัมบูรณ์เพื่อย้ายไปยังพิกัดที่ระบุไว้ในพารามิเตอร์ของบล็อก
บันทึกพฤติกรรมที่เกี่ยวข้องกับบล็อกในสมุดบันทึกวิศวกรรมของคุณ
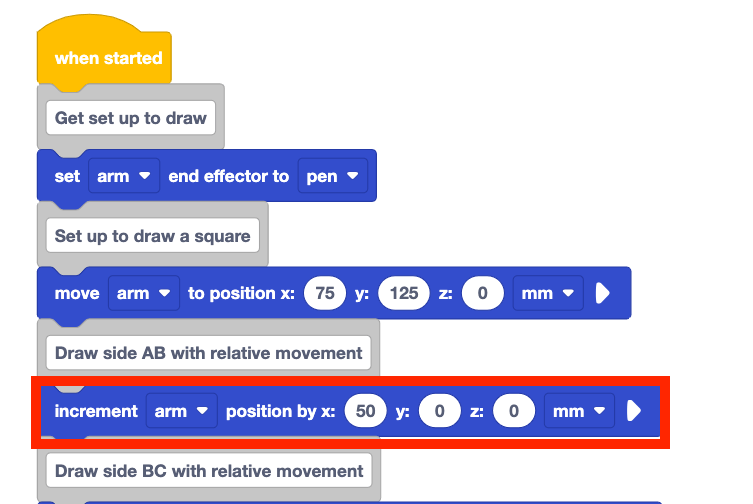
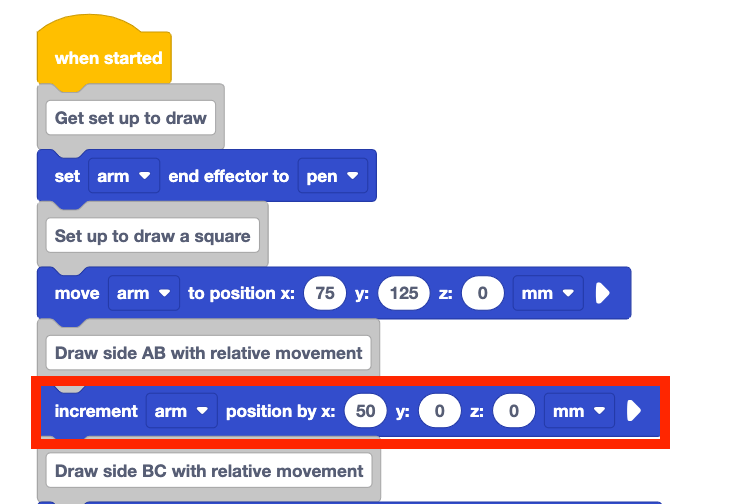
ดูบล็อกการเคลื่อนไหวถัดไปในโครงการ นี่เป็นการเคลื่อนไหวแบบสัมบูรณ์หรือแบบสัมพัทธ์?
นี่คือ บล็อกตำแหน่งที่ เพิ่มขึ้นดังนั้นจึงบ่งบอกถึงการเคลื่อนที่สัมพัทธ์โดยแขน 6 แกน
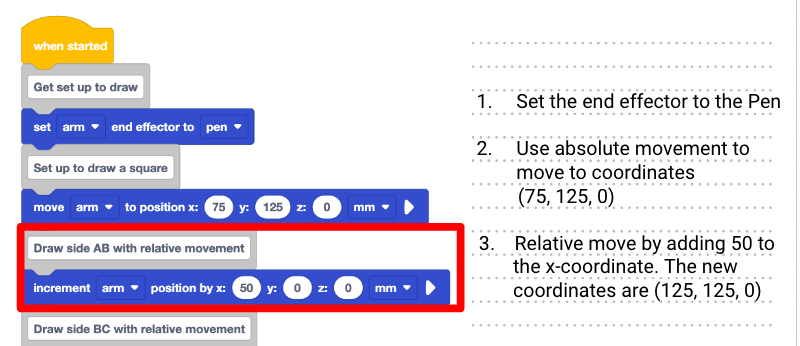
ใช้ส่วนเพิ่มที่ให้ไว้ในพารามิเตอร์ของบล็อกเพื่อกำหนดตำแหน่งที่แขน 6 แกนจะเคลื่อนที่เมื่อบล็อกนี้ถูกดำเนินการ ทำสิ่งนี้โดยการเพิ่มค่าของการเคลื่อนที่สัมพัทธ์ (50 มม.) ของพิกัดที่ตรงกัน (x) จากบล็อกการเคลื่อนที่สัมบูรณ์
บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
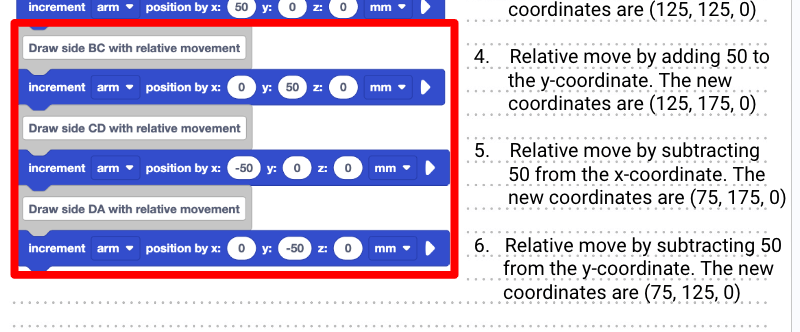
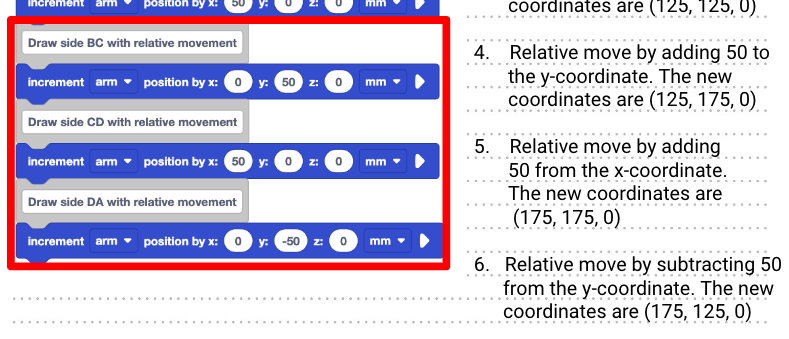
ดำเนินการขั้นตอนนี้ต่อสำหรับบล็อกที่เหลือในโครงการ บันทึกสิ่งที่แต่ละบล็อคจะทำเมื่อมีการเรียกใช้โปรเจกต์
อย่าลืมอ่าน บล็อก ความคิดเห็นและหมายเหตุสำหรับการอ้างอิงเมื่ออ่านโครงการ
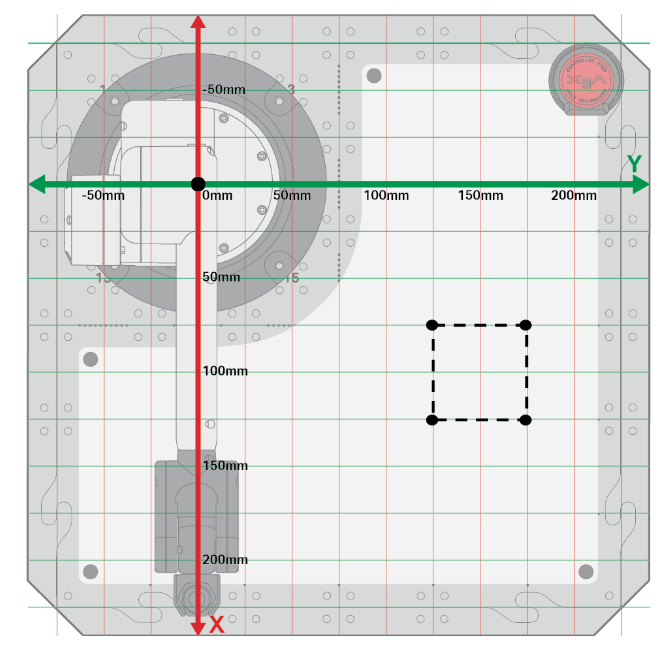
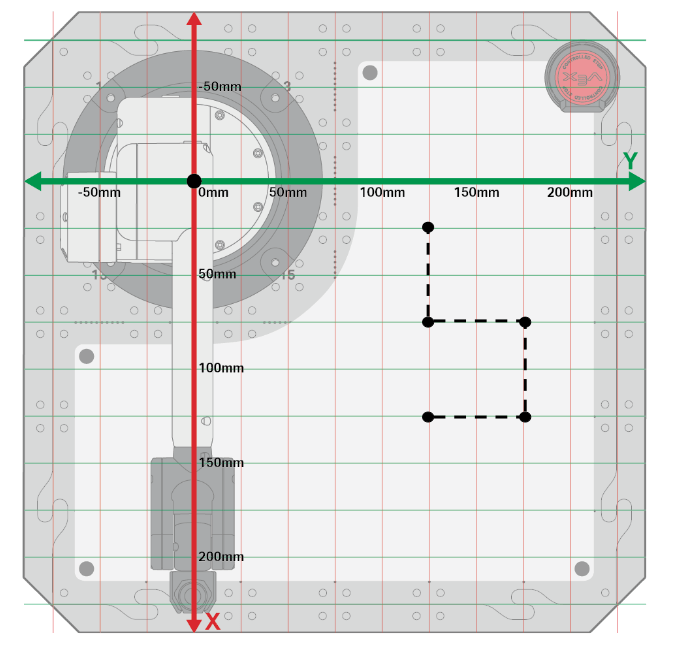
ร่างเส้นทางของแขน 6 แกนเมื่อดำเนินโครงการ
เพื่อช่วยให้เห็นภาพผลิตภัณฑ์สุดท้ายของโครงการให้ใช้พิกัดที่คุณกำหนดเพื่อร่างเส้นทางในสมุดบันทึกวิศวกรรมของคุณ
ดูโปรเจกต์ที่กำลังดำเนินการ ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ
- พฤติกรรมที่สังเกตได้ของแขน 6 แกนเปรียบเทียบกับรายการพฤติกรรมของคุณในสมุดบันทึกวิศวกรรมของคุณอย่างไร?
- รายการพฤติกรรมของท่านเปรียบเทียบกับการคาดการณ์ที่ท่านทำเมื่อเริ่มต้นบทเรียนอย่างไร?
- การคาดการณ์ ที่ท่านคาดการณ์ไว้ในตอนต้นของบทเรียนเปรียบเทียบกับพฤติกรรม ที่แสดงในวีดิทัศน์นี้อย่างไร?
ขอแสดงความยินดี! ตอนนี้คุณได้อ่านโค้ดและใช้ความรู้ดังกล่าวเพื่อพิจารณาว่าจะเกิดอะไรขึ้นเมื่อดำเนินโครงการ คุณจะยังคงฝึกฝนสิ่งนี้ต่อไปด้วยตัวอย่างเพิ่มเติมสองตัวอย่าง
การอ่านรหัสในโครงการ B
ในตัวอย่างนี้คุณจะต้องฝึกอ่านโค้ดเพื่อค้นหาข้อผิดพลาดในโปรเจกต์ ความตั้งใจของโครงการนี้คือการวาดสี่เหลี่ยมจัตุรัสเช่นเดียวกับในโครงการ A อย่างไรก็ตามหากโครงการ B ทำงานแขน 6 แกนจะไม่วาดสี่เหลี่ยมจัตุรัสตามที่ตั้งใจไว้ คุณจะอ่านโค้ดในตัวอย่างนี้โดยทำตามขั้นตอนเดียวกับที่คุณใช้ในโครงการ A เพื่อค้นหาข้อผิดพลาด จากนั้นคุณจะใช้ข้อมูลจากการอ่านรหัสของเราเพื่อระบุวิธีแก้ไขปัญหา
บันทึกโครงการลงในสมุดบันทึกวิศวกรรมของคุณ ซึ่งสามารถทำได้โดยการเขียนขั้นตอนตามลำดับหรือเพิ่มภาพรหัสลงในสมุดบันทึกของคุณโดยตรง
คาดการณ์ว่าแขน 6 แกนจะทำอะไรเมื่อดำเนินโครงการ คุณจะกลับไปที่การคาดการณ์นี้หลังจากเสร็จสิ้นกระบวนการอ่านรหัสนี้
เริ่มต้นที่จุดเริ่มต้นของโครงการ จัดทำเอกสารบล็อกการตั้งค่าโปรเจกต์เช่นเดียวกับที่คุณทำสำหรับโปรเจกต์ก่อนหน้านี้
อ่านบล็อกการเคลื่อนไหวแรกในโครงการโดยให้ความสนใจว่าการเคลื่อนไหวนั้นเป็นแบบสัมบูรณ์หรือแบบสัมพัทธ์ การบล็อคจะทำให้แขน 6 แกนทำงานได้สำเร็จในลักษณะใด? แสดงภาพพฤติกรรมนี้
บันทึกพฤติกรรมที่คุณเห็นเป็นภาพสำหรับบล็อกนี้ในสมุดบันทึกวิศวกรรมของคุณ
ตอนนี้ดูที่บล็อกการเคลื่อนไหวที่สอง นี่เป็นการเคลื่อนไหวแบบสัมบูรณ์หรือแบบสัมพัทธ์? นี่คือ บล็อกตำแหน่งที่ เพิ่มขึ้นดังนั้นจึงบ่งบอกถึงการเคลื่อนที่สัมพัทธ์โดยแขน 6 แกน
แสดงภาพลักษณะการทำงานของบล็อกนี้จะทำให้แขน 6 แกนเสร็จสมบูรณ์
เช่นเดียวกับที่คุณทำสำหรับโครงการ A อ่านพารามิเตอร์ของบล็อกเพื่อกำหนดตำแหน่งของแขน 6 แกนจะอยู่ที่ใดหลังจากที่ บล็อกตำแหน่งการ เพิ่มขึ้นถูกดำเนินการ บันทึกลงในสมุดบันทึกวิศวกรรมของคุณ
ดำเนินการต่อสำหรับบล็อกที่เหลือในโครงการ แสดงภาพจากนั้นบันทึกสิ่งที่แต่ละบล็อกจะทำเมื่อมีการเรียกใช้โปรเจกต์
ร่างเส้นทางของแขน 6 แกนเมื่อดำเนินโครงการ
เพื่อช่วยให้เห็นภาพและบันทึกผลิตภัณฑ์สุดท้ายของโครงการให้ใช้พิกัดที่คุณกำหนดเพื่อร่างเส้นทางในสมุดบันทึกวิศวกรรมของคุณ
ดูโปรเจกต์ที่กำลังดำเนินการ ตอบคำถามต่อไปนี้ในสมุดบันทึกวิศวกรรมของคุณ
- พฤติกรรมที่สังเกตได้ของแขน 6 แกนเปรียบเทียบกับรายการพฤติกรรมของคุณในสมุดบันทึกวิศวกรรมของคุณอย่างไร?
- รายการพฤติกรรมของท่านเปรียบเทียบกับการคาดการณ์ที่ท่านทำเมื่อเริ่มบทเรียนอย่างไร?
- การคาดการณ์ ที่ท่านคาดการณ์ไว้ในตอนต้นของบทเรียนเปรียบเทียบกับพฤติกรรม ที่แสดงในวีดิทัศน์นี้อย่างไร?
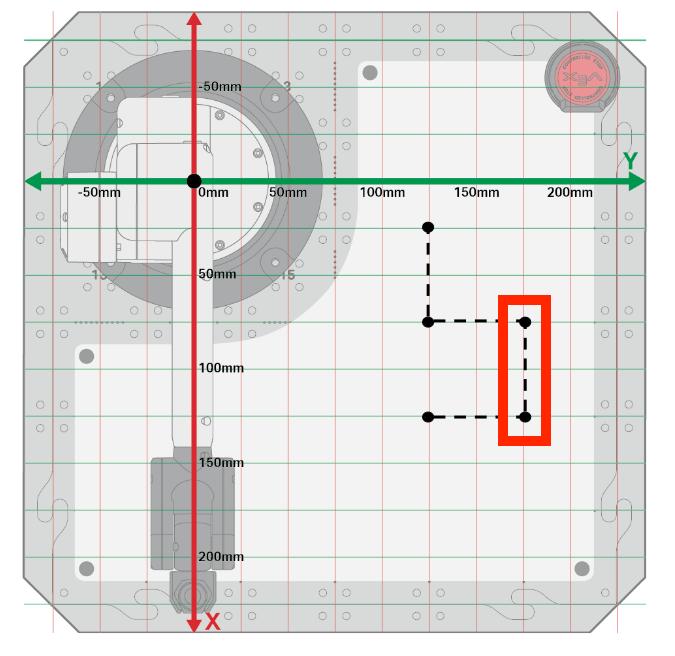
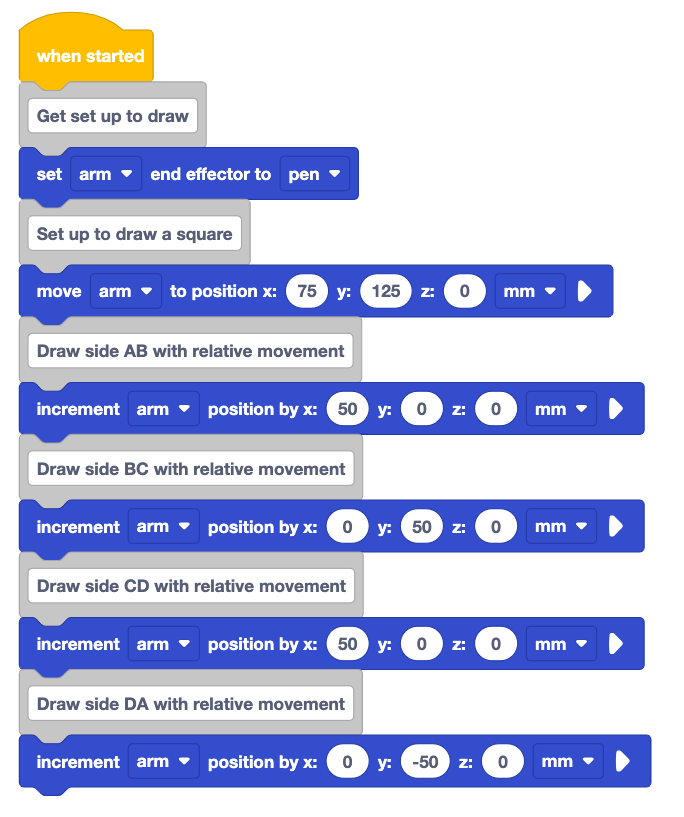
ทีนี้ก็กลับมาที่ sketch นะคะ ระบุขั้นตอนที่โครงการหยุดวาดสี่เหลี่ยมจัตุรัส ในขณะที่แขน 6 แกนดำเนินการบล็อกการเคลื่อนไหวสามบล็อกแรกในโครงการดูเหมือนว่าปากกาจะยังคงวาดสี่เหลี่ยมจัตุรัสต่อไป
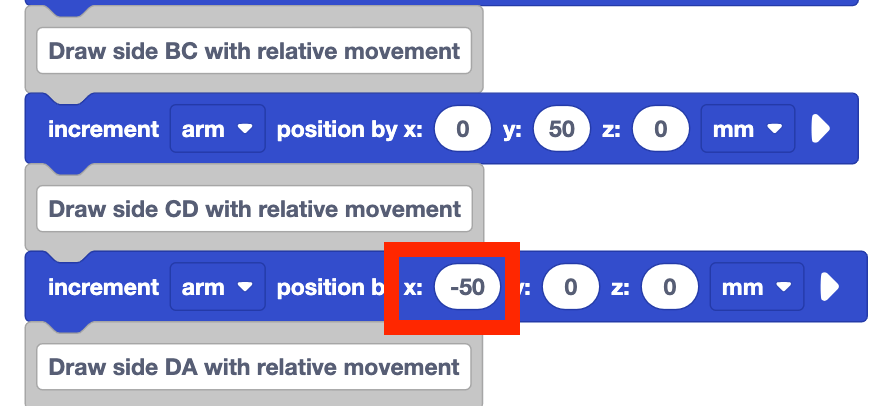
อย่างไรก็ตามในบล็อกการเคลื่อนไหวที่สี่แขน 6 แกนจะเคลื่อนที่ไปในทิศทางตรงกันข้ามกับที่คาดไว้ตามแกน x บวกมากกว่าแกน x ลบ ค้นหาขั้นตอนนี้ในโครงการและทำเครื่องหมายในสมุดบันทึกวิศวกรรมของคุณ
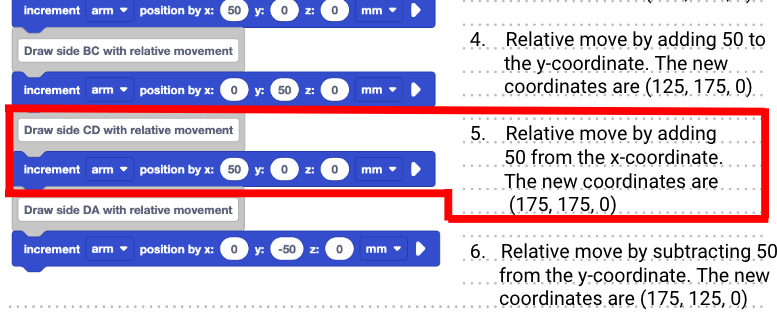
ตอนนี้ระบุบล็อกในโครงการที่สอดคล้องกับขั้นตอนที่เกิดข้อผิดพลาด ทำเครื่องหมายบล็อกในสมุดบันทึกวิศวกรรมของคุณด้วย
ใช้สิ่งที่คุณรู้เกี่ยวกับการเคลื่อนที่ไปตามแกนเพื่อแนะนำการแก้ไขข้อผิดพลาดนี้
ในการวาดสี่เหลี่ยมจัตุรัสแขน 6 แกนต้องเคลื่อนที่ไปตามแกน x ในทิศทางลบ ซึ่งหมายความว่า บล็อกตำแหน่งที่ เพิ่มขึ้นนี้ควรมีการตั้งค่าพารามิเตอร์ x ไว้ที่ –50 แทนที่จะเป็น 50
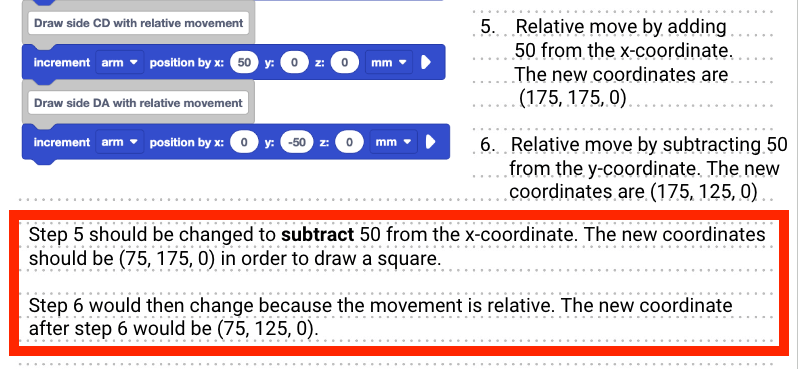
บันทึกการเปลี่ยนแปลงที่จำเป็นเพื่อให้โครงการทำงานได้อย่างถูกต้องในสมุดบันทึกวิศวกรรมของคุณ
ดูการทำงานของโปรเจกต์ด้วยพารามิเตอร์ x ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเปลี่ยนจาก 50 เป็น –50 แขน 6 แกนตอนนี้วาดสี่เหลี่ยมจัตุรัสตามที่ตั้งใจไว้
ตอนนี้คุณอ่านโค้ดสำหรับโปรเจกต์ที่แตกต่างกันสองโปรเจกต์เสร็จแล้วโปรเจกต์หนึ่งเพื่อช่วยให้คุณเรียนรู้กระบวนการอ่านและจัดทำเอกสารโค้ดและอีกโปรเจกต์หนึ่งเพื่ออ่านโค้ดเพื่อระบุข้อผิดพลาดในโปรเจกต์ คุณจะยังคงฝึกฝนการอ่านโค้ดการมองเห็นและการจัดทำเอกสารโครงการทุกครั้งที่คุณทำงานกับแขน 6 แกนและรหัส VEX ท่านสามารถกลับไปที่บทเรียนนี้ได้ตลอดเวลาเพื่อช่วยให้ท่านจดจำขั้นตอนการอ่านและบันทึกรหัส
กิจกรรม
ตอนนี้คุณได้ฝึกฝนการอ่านรหัสโดยใช้สองโครงการที่แตกต่างกันแล้วคุณจะฝึกฝนอีกครั้งด้วยตัวคุณเอง

กิจกรรม: ทำตามขั้นตอนที่ท่านเรียนรู้เพื่ออ่านรหัสในโครงการด้านบน
- บันทึกโครงการด้านบนลงในสมุดบันทึกวิศวกรรมของคุณ
- คาดการณ์สิ่งที่คุณคิดว่าแขน 6 แกนจะทำเมื่อดำเนินโครงการ บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
- อ่านแต่ละ บล็อคในโครงการและดูพฤติกรรมที่แขน 6 แกนจะทำเมื่อดำเนินการบล็อค บันทึกพฤติกรรมนี้ลงในสมุดบันทึกวิศวกรรมของคุณ
- ร่างเส้นทาง ที่แขน 6 แกนจะใช้เมื่อดำเนินโครงการ
- เช็คอินกับครูของคุณเมื่อคุณเสร็จสิ้น คุณจะได้ดูโปรเจกต์ทำงานเป็นชั้นเรียน จากนั้นคุณจะ หารือเกี่ยวกับการคาดการณ์และเอกสารของคุณ
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัดไป > เพื่อเริ่มการสะท้อนหน่วยกลางของคุณ