
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนแกล้งทำเป็นว่าหุ่นยนต์ Code Base
ของพวกเขาเป็นรถสำรวจดาวอังคาร พวกเขาจะสร้างโปรเจ็กต์ใน VEXcode GO
เพื่อขับเคลื่อนและรวบรวมตัวอย่างด้วย Code Base แอนิเมชั่นนี้จะแสดงให้เห็นว่า Code Base
จะเคลื่อนไหวอย่างไรในการท้าทายนี้
ไฟล์วีดีโอ
- แบบจำลอง แบบจำลองสำหรับนักเรียนในการสร้างโครงการใน VEXcode GO
และทดสอบโครงการของพวกเขาในภาคสนาม
- เริ่มต้นด้วยการแสดงให้ผู้เรียนเห็นถึงวิธีการเชื่อมต่อ Brain บน Code Base ของพวกเขาเข้ากับอุปกรณ์ใน VEXcode GO เพราะขั้นตอนการเชื่อมต่อแตกต่างกันไปตามอุปกรณ์, ดูบทความการเชื่อมต่อของ VEXcode GO VEX Library เพื่อดูขั้นตอนเฉพาะในการเชื่อมต่อ VEX GO Brain กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ.
- พวกเขายังต้องกำหนดค่า VEXCode GO สำหรับ Code Base ด้วย If necessary, สร้างแบบจำลองขั้นตอนจากบทความ Configure a Code Base VEX Library และให้แน่ใจว่านักเรียนสามารถเห็นบล็อก Drivetrain ในกล่องเครื่องมือได้
- ลากบล็อก [ไดรฟ์สำหรับ] เข้าไปในพื้นที่ทำงานและแนบเข้ากับบล็อก {When started}
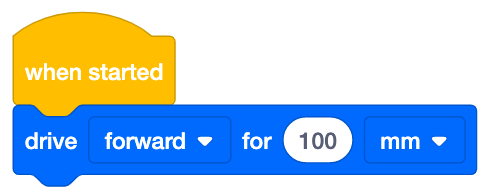
เพิ่ม [ไดรฟ์สำหรับ] บล็อค - แบบจำลองสำหรับนักเรียนเกี่ยวกับวิธีการเปลี่ยนพารามิเตอร์ของบล็อก [Drive for] เพื่อให้ฐานโค้ดขับเคลื่อนไปข้างหน้าไปยังตำแหน่งตัวอย่าง หมายเหตุ: 325 มิลลิเมตร (มม.) จะขับเคลื่อนฐานโค้ดไปยังตัวอย่างในการตั้งค่าฟิลด์ที่แนะนำ
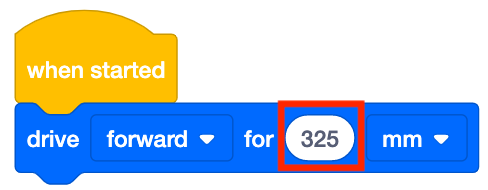
เปลี่ยนพารามิเตอร์ - จากนั้นให้ให้ผู้เรียนลากบล็อก [ตั้งค่าสีกันชน] เข้ามาเพื่อให้ฐานโค้ดส่งสัญญาณว่ากำลังรวบรวมตัวอย่าง บล็อคนี้จะมีไฟ LED Bumper เรืองแสงตามสีที่เลือก

เพิ่มบล็อค [Set bumper color] - ขั้นต่อไป ให้ให้นักเรียนลากบล็อก [รอ] เข้ามา และตั้งค่าเป็น 3 วินาที สามวินาทีนี้จะช่วยให้ฐานโค้ดมีเวลาในการ "รวบรวมตัวอย่าง"
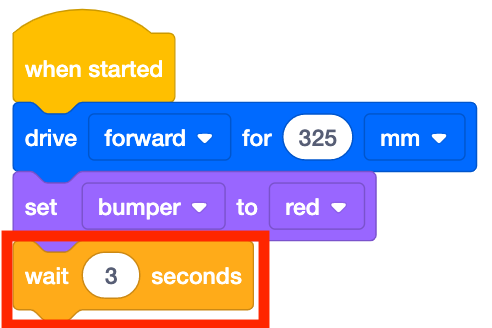
เพิ่มบล็อค [Wait] และตั้งค่าเป็น 3 วินาที - จากนั้นนักเรียนควรเพิ่มบล็อก [ตั้งค่าสีกันชน] อีกบล็อกและตั้งค่าเป็นปิด การกระทำนี้จะทำให้ LED Bumper ดับลงเพื่อส่งสัญญาณว่าได้เก็บตัวอย่างแล้ว

เพิ่ม [ตั้งค่าสีบัมเปอร์] และตั้งค่าเป็นปิด - หลังจากที่นักเรียนสร้างโครงการของตนเสร็จแล้ว ให้พวกเขาตั้งชื่อโครงการเป็น รวบรวม 1 และบันทึกลงในอุปกรณ์ของตน ดูส่วนเปิดและบันทึกของไลบรารี VEXcode GO VEX สำหรับขั้นตอนเฉพาะอุปกรณ์ในการบันทึกโครงการ VEXcode GO.
- แบบจำลองสำหรับนักเรียนในการวางหุ่นยนต์ Code Base บนสนาม หุ่นยนต์ควรเริ่มต้นที่ 'X' และหันหน้าไปทางวงกลมซึ่งจะเก็บตัวอย่าง
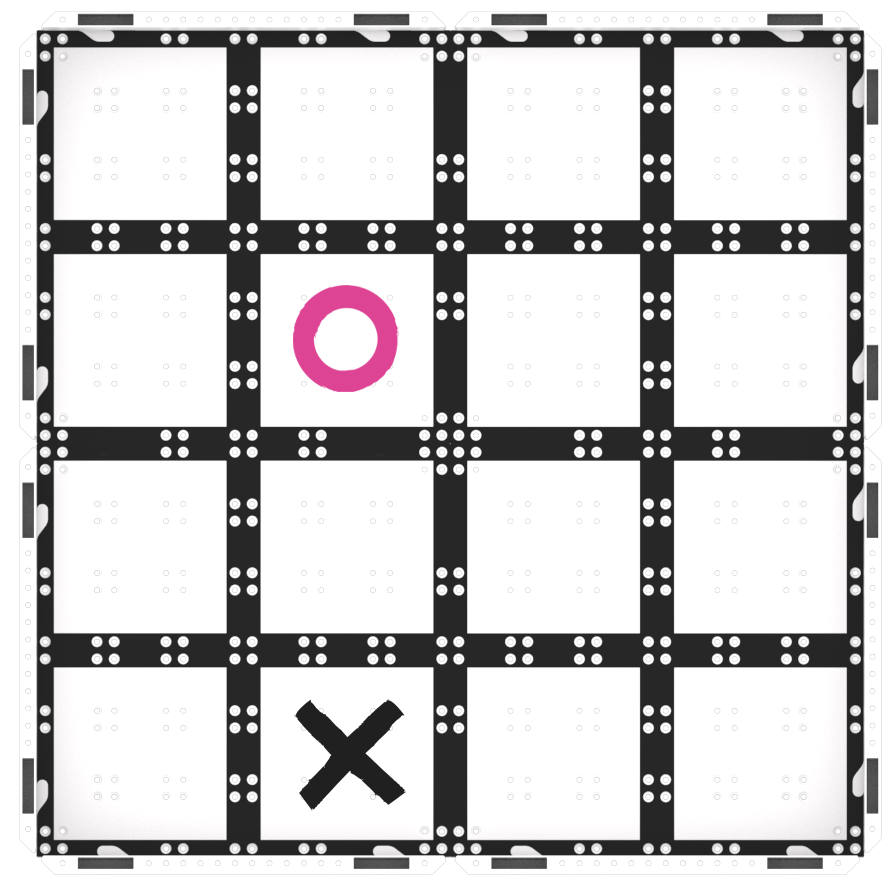
แล็บ 1 การตั้งค่าภาคสนาม - เมื่อวางฐานโค้ดลงบนสนามแล้ว ให้ให้ผู้เรียนเลือกเริ่มต้นใน VEXcode GO เพื่อทดสอบโปรเจ็กต์ของพวกเขา
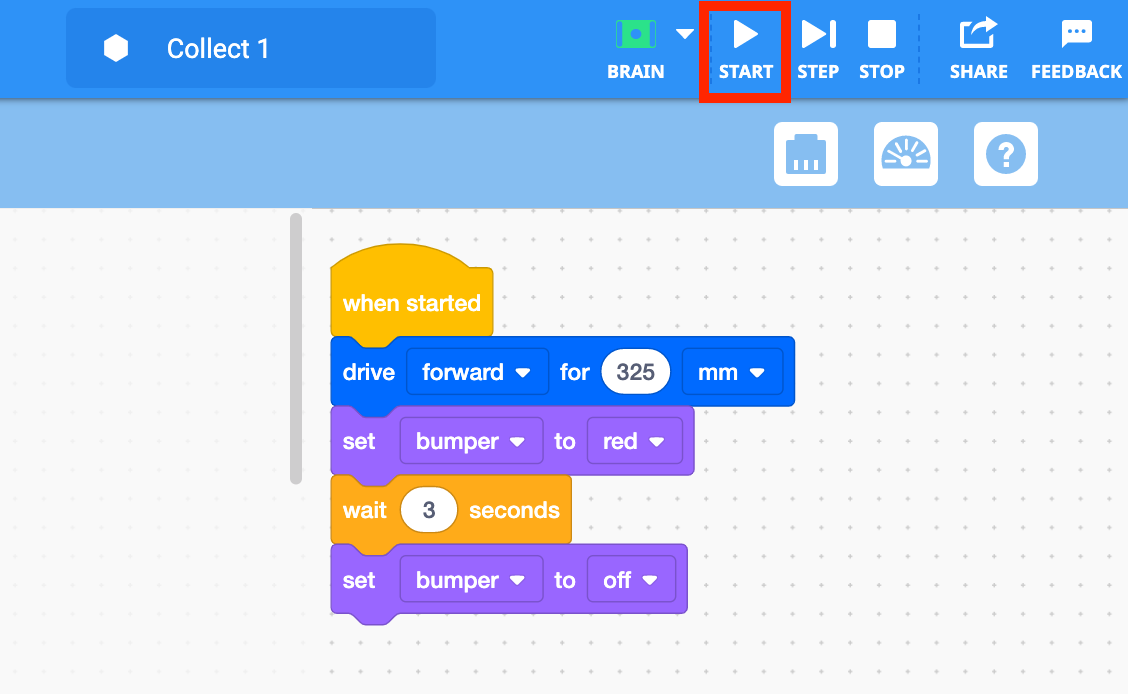
เลือกเริ่มเพื่อทดสอบ รวบรวม 1 โปรเจ็กต์ - หลังจากที่ Code Base ขับเคลื่อน 325 มม. ไปยังตำแหน่งการรวบรวม ไฟ LED Bumper จะเรืองแสงสีแดงเพื่อระบุว่ากำลังรวบรวมตัวอย่าง นักเรียนควรวางรายการ “ตัวอย่าง” ไว้บนฐานโค้ด หลังจากผ่านไป 3 วินาที ไฟ LED จะดับลง เพื่อระบุว่าการเก็บตัวอย่างเสร็จสิ้นแล้ว
- สำหรับกลุ่มที่ทำเสร็จเร็วและต้องการความท้าทายเพิ่มเติม ให้พวกเขาเพิ่มบล็อก [Turn for] ที่ตอนท้ายของโครงการและทดสอบเพื่อดูว่าฐานโค้ดจะทำอะไร ขอให้พวกเขาทำการทดลอง และคิดหาวิธีที่บล็อกนี้จะมีประโยชน์ในการเก็บตัวอย่างบนสนามได้
- อำนวยความสะดวกอำนวยความสะดวกให้กับนักเรียนในการทำงานกับ VEXcode GO
และทดสอบโครงการของพวกเขา ในขณะที่นักเรียนกำลังทดสอบโครงการของตน
ให้ถามคำถามเพื่อช่วยให้พวกเขาคิดเกี่ยวกับวิธีการที่ฐานโค้ดของพวกเขากำลังดำเนินไป
- คุณช่วยแสดงให้ฉันเห็นด้วยมือของคุณได้ไหมว่าฐานโค้ดของคุณจะเคลื่อนไหวเพื่อเก็บ "ตัวอย่าง" อย่างไร
- คุณคิดว่า Code Base ของคุณอาจจะเคลื่อนตัวต่อไปอย่างไรหากจะต้องย้อนกลับไปยังฐาน?
- เตือนเตือนนักเรียนว่าพวกเขาสามารถแก้ไขโครงการของตนได้ และทดสอบซ้ำหากฐานโค้ดของพวกเขาไม่สามารถเข้าถึงตำแหน่ง "ตัวอย่าง" ในครั้งแรก นักเรียนควรตรวจสอบพารามิเตอร์ในบล็อก [ไดรฟ์สำหรับ] เพื่อให้แน่ใจว่ามีระยะทางที่ถูกต้องตามที่จำเป็นในการเข้าถึงตัวอย่าง
- ถามถามนักเรียนเกี่ยวกับสิ่งต่างๆ ที่พวกเขาคิดว่ารถสำรวจดาวอังคารกำลังเก็บรวบรวมไว้ในภารกิจ ถ้าพวกเขาเป็นนักวิทยาศาสตร์ที่ศึกษาดาวอังคาร พวกเขาอยากเรียนรู้เรื่องอะไร?
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
เมื่อกลุ่ม แต่ละกลุ่มเก็บตัวอย่างครบแล้ว ให้มารวมกันเพื่อสนทนาสั้นๆ
- ตอนนี้เราได้เก็บตัวอย่างแล้ว คุณคิดว่าหุ่นยนต์ของเราจะต้องทำอะไรกับตัวอย่างนั้น?
- คุณคิดว่าเราจะเขียนโค้ดฐาน Code Base เพื่อให้มันกลับมาที่ฐานได้อย่างไร? หุ่นยนต์จะต้องเคลื่อนที่อย่างไรเพื่อนำตัวอย่างไปส่งที่ฐาน?
- คุณคิดว่าเราอาจจำเป็นต้องใช้บล็อคใดในส่วนต่อไปของโปรเจ็กต์เพื่อทำสิ่งนั้น?
ตอนที่ 2 - ทีละขั้นตอน
- สั่งให้สั่งให้นักเรียนเพิ่มเนื้อหาลงในโครงการของตน ดังนั้นฐานโค้ดจึงนำ
"ตัวอย่าง" กลับไปที่ฐาน แอนิเมชั่นด้านล่างนี้แสดงให้เห็นฐานโค้ดกำลังขับรถไปเก็บ "ตัวอย่าง"
จากนั้นจึงกลับไปที่ฐานเพื่อส่งมอบ "ตัวอย่าง"
ไฟล์วีดีโอ
- แบบจำลอง แบบจำลองสำหรับนักเรียนในการสร้างโครงการ VEXcode GO
ที่มีอยู่และทดสอบบนภาคสนาม
- นักเรียนของคุณอาจสามารถสร้างโครงการเพื่อทำความท้าทายนี้ให้สำเร็จได้ด้วยตนเอง อย่างไรก็ตาม สำหรับนักเรียนที่อายุน้อยกว่า คุณอาจต้องการสร้างโครงการร่วมกันเป็นชั้นเรียน เช่นเดียวกับที่คุณทำใน Play ส่วนที่ 1 หากคุณกำลังสร้างโครงการร่วมกันคุณสามารถทำตามขั้นตอนต่อไปนี้ได้
- หากนักเรียนจำเป็นต้องเปิดโครงการ Collect 1 ให้จำลองขั้นตอนเฉพาะอุปกรณ์ ตามที่แสดงในบทความไลบรารี VEX ในส่วนเปิดและบันทึก.
- ให้เด็กนักเรียนเพิ่มบล็อกลงในโครงการ VEXcode GO เพื่อสร้างโค้ดใหม่ในรูปภาพด้านล่าง กล่องสีแดงระบุถึงบล็อคใหม่ที่ต้องเพิ่มเข้าไปในโครงการ
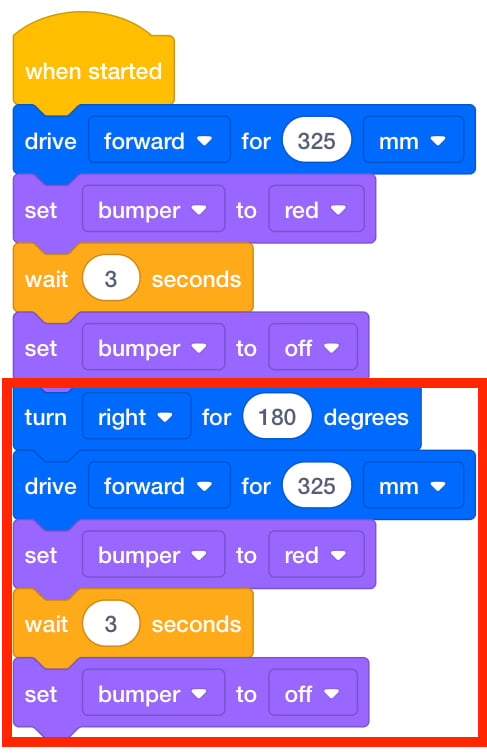
เพิ่มบล็อคเพื่อให้โครงการ Code Base Return- Collect Return - หากนักเรียนไม่เคยใช้บล็อก [Turn for] ในโปรเจ็กต์ก่อนหน้านี้ ให้จำลองวิธีลากบล็อก [Turn for] เข้าไปในโปรเจ็กต์ และเปลี่ยนพารามิเตอร์เป็น 180 องศา ระยะการหมุนถูกตั้งไว้ที่ 180 องศา เพื่อให้ฐานโค้ดหมุนกลับมาเผชิญหน้ากับฐานก่อนจะขับเคลื่อนไปข้างหน้าเพื่อส่งมอบตัวอย่าง
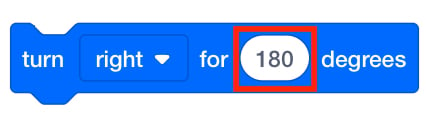
[หมุนเพื่อ] ตั้งบล็อคเป็น 180 องศา - หลังจากที่นักเรียนสร้างโครงการของตนเสร็จแล้ว ให้ตั้งชื่อโครงการเป็น รวบรวม ส่งคืน และบันทึกลงในอุปกรณ์ของตน ดูส่วนเปิดและบันทึกของไลบรารี VEXcode GO VEX สำหรับขั้นตอนเฉพาะอุปกรณ์ในการบันทึกโครงการ VEXcode GO.
- ให้เด็กนักเรียนวาง Code Base ของตนลงบน Field จากนั้นเลือก Start in VEXcode GO เพื่อทดสอบโครงการของตน
เลือกเริ่มเพื่อทดสอบโครงการ - หลังจากที่ Code Base ขับเคลื่อนไปยังสถานที่รวบรวม นักเรียนควรวางไอเทม "ตัวอย่าง" ไว้ด้านบนของหุ่นยนต์เมื่อไฟ LED Bumper สว่างเป็นสีแดง จากนั้นฐานโค้ดจะเลี้ยวขวา 180 องศาและขับกลับฐาน หลังจากที่หุ่นยนต์กลับสู่ฐานและไฟ LED Bumper เรืองแสงสีแดง นักเรียนควรลบ "ตัวอย่าง" ออกจากฐานโค้ด กันชน LED จะดับลงเพื่อเป็นสัญลักษณ์ว่าตัวอย่างได้ถูกส่งมอบแล้ว
- หากนักเรียนรวบรวมและส่งมอบตัวอย่างเสร็จแล้วและมีเวลาเพิ่มเติม ควรแนะนำให้นักเรียนลองไปค้นหาสถานที่เก็บตัวอย่างอื่น ใช้ปากกามาร์กเกอร์สำหรับไวท์บอร์ดเพื่อทำเครื่องหมายตำแหน่งตัวอย่างที่ใกล้หรือห่างจากฐานหนึ่งขั้น จากนั้นให้เด็กๆ ปรับพารามิเตอร์ของโครงการเพื่อเข้าถึงตัวอย่างใหม่นี้และส่งมอบไปที่ฐาน
- อำนวยความสะดวกอำนวยความสะดวกให้นักศึกษาได้ทดสอบโครงการของพวกเขาและผลัดกันลงสนาม
ในขณะที่นักเรียนกำลังทดสอบ
ให้ถามพวกเขาเกี่ยวกับลำดับของบล็อกในโปรเจ็กต์ที่ช่วยให้ฐานโค้ดเคลื่อนไปยังตำแหน่งที่ถูกต้องได้
- คุณแสดงให้ฉันดูด้วยมือของคุณได้ไหมว่า Code Base จะเคลื่อนที่อย่างไรหากตั้งค่าบล็อก [Turn for] ไว้ที่ซ้ายแทนที่จะเป็นขวา
- ถ้าส่วนการเลี้ยวของโครงการมาอยู่ก่อนส่วนการขับเคลื่อนจะเกิดอะไรขึ้น? ฐานโค้ดของคุณสามารถเข้าถึงตัวอย่างได้หรือไม่
ตรวจสอบการ การใช้เซ็นเซอร์ VEX GO และ การเขียนโค้ดด้วย VEX GO LED บทความเกี่ยวกับบัมเปอร์ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบัมเปอร์ LED.
- เตือนเตือนนักเรียนว่าพวกเขาควรตรวจสอบโครงการของตนและเปรียบเทียบกับภาพของโครงการก่อนที่จะทำการทดสอบ หากนักศึกษาหนึ่งคนสร้างโปรเจ็กต์ใน VEXcode GO คู่หูของนักศึกษาจะสามารถตรวจสอบโค้ดได้ก่อนที่จะวางฐานโค้ดลงบนสนามและเริ่มต้นโปรเจ็กต์
- ถามถามนักเรียนเกี่ยวกับจำนวนตัวอย่างที่พวกเขาคิดว่านักวิทยาศาสตร์พยายามรวบรวมเพื่อศึกษาดาวอังคาร เหตุใดจำนวนตัวอย่างที่มากขึ้นจึงมีประโยชน์มากกว่าจำนวนตัวอย่างที่น้อยลง? คุณคิดว่าฐานโค้ดของเราสามารถรวบรวมตัวอย่างหลายตัวอย่างได้หรือไม่