
Hãy sẵn sàng di chuyển robot của bạn theo những hướng mới thú vị! Trong bài học này, bạn sẽ học cách lái robot của mình theo mọi góc độ bằng cách sử dụng khối Di chuyển theo góc cho. Kiểm tra độ chính xác của bạn bằng cách di chuyển quanh thùng mà không chạm vào nó và khám phá cách các góc chính xác giúp robot của bạn di chuyển nhanh hơn và thông minh hơn!
Xem video bên dưới để tìm hiểu về:
- Sử dụng Di chuyển theo góc cho khối trong một dự án.
- Xác định góc di chuyển của robot.
Bây giờ bạn đã xem video, hãy ghi lại suy nghĩ của mình vào nhật ký. Trả lời những câu hỏi này để định hướng suy nghĩ của bạn và giúp bạn chuẩn bị cho cuộc thảo luận toàn lớp:
- Bạn nhận thấy điều gì về cách robot di chuyển khi sử dụng khối này so với khối trước? Viết ít nhất hai nhận xét.
- Liệt kê ít nhất hai câu hỏi bạn có về việc tìm góc.
- Bạn đã học được điều gì về mã hóa hoặc VEXcode có thể giúp ích cho bạn trong bài học này?
Bây giờ bạn đã xem video, hãy ghi lại suy nghĩ của mình vào nhật ký. Trả lời những câu hỏi này để định hướng suy nghĩ của bạn và giúp bạn chuẩn bị cho cuộc thảo luận toàn lớp:
- Bạn nhận thấy điều gì về cách robot di chuyển khi sử dụng khối này so với khối trước? Viết ít nhất hai nhận xét.
- Liệt kê ít nhất hai câu hỏi bạn có về việc tìm góc.
- Bạn đã học được điều gì về mã hóa hoặc VEXcode có thể giúp ích cho bạn trong bài học này?
Sau khi học sinh xem video và trước khi thực hành, tập hợp lại để thảo luận toàn lớp. Sử dụng câu trả lời của học sinh cho các câu hỏi được cung cấp làm cơ sở cho cuộc thảo luận.
Ghi lại những đóng góp của học sinh lên bảng để mọi người có thể xem và xây dựng dựa trên ý tưởng của nhau. Nhắc nhở họ tham khảo nhật ký hoặc hình ảnh trong video để giúp họ diễn đạt ý tưởng của mình một cách rõ ràng hơn.
Thực hành có hướng dẫn
Bây giờ bạn đã xem và thảo luận về video, đến lượt bạn thực hành!
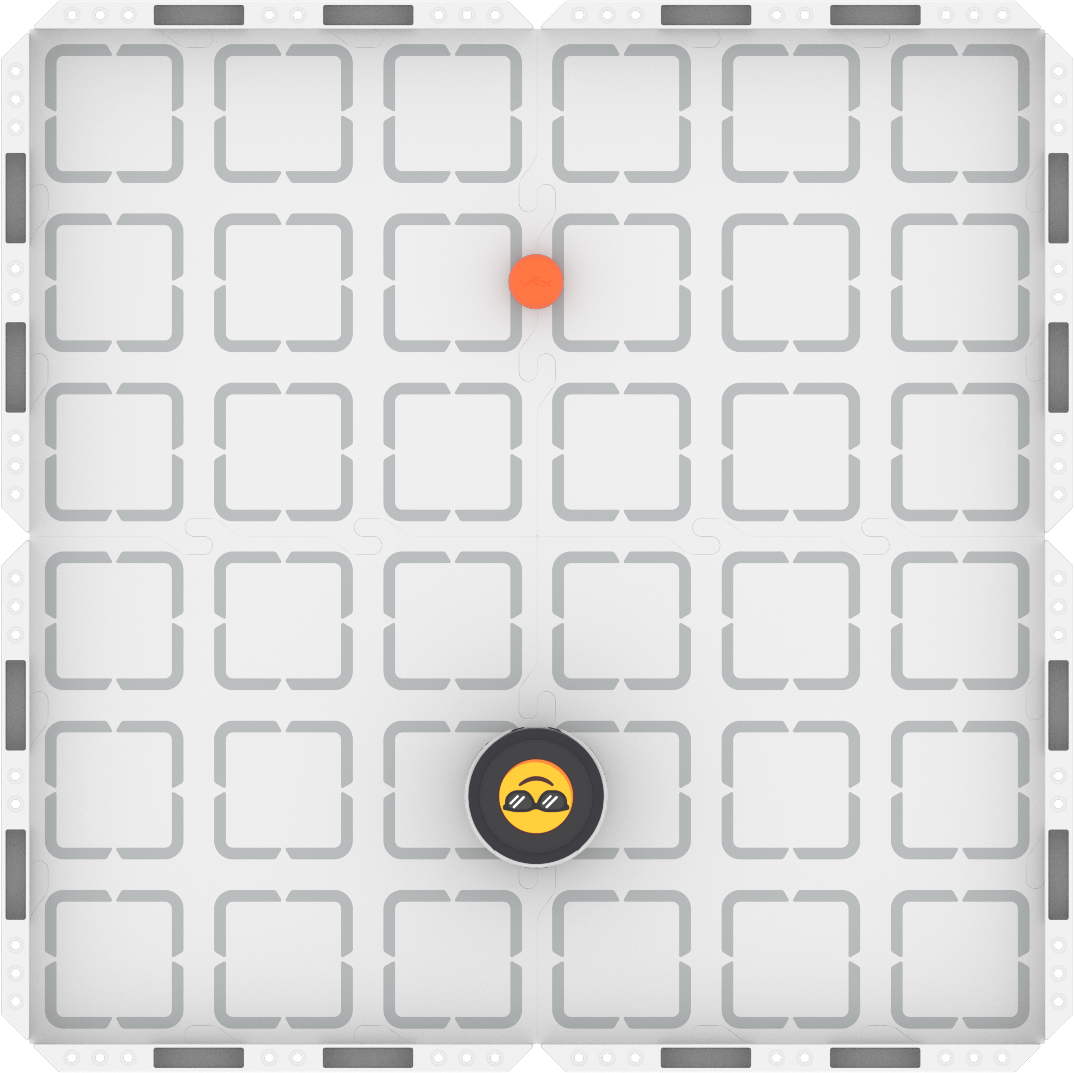
Bước 1: Thiết lập trường như hình dưới đây.
Bước 2: Sử dụng chế độ Lái xe để mô phỏng các chuyển động mà robot của bạn cần để hoàn thành nhiệm vụ.
- Nhiệm vụ của bạn là lái robot đi vòng quanh thùng màu cam. Ghi lại quá trình lái xe của bạn, sau đó lập kế hoạch mã hóa chuyển động đó.
- Sử dụng thẻ nhiệm vụ này (Google / .docx / .pdf) để hướng dẫn thực hành của bạn.
- Mẹo chuyên nghiệp: Hãy nghĩ lại các chiến lược xác định góc quay trong video. Hãy chú ý đến từng góc độ và khoảng cách, và ghi chép chúng một cách chi tiết để lập kế hoạch cho đường đi. Sử dụng Thước đo góc Robot , được hiển thị trong video, để xác định các góc đó khi lập kế hoạch cho đường đi của bạn.
Bước 3: Lập trình cho robot để hoàn thành nhiệm vụ.
- Nhiệm vụ của bạn là sử dụng sơ đồ đường đi từ Bước 2 để lập trình cho robot di chuyển xung quanh thùng màu cam.
- Sử dụng thẻ nhiệm vụ này (Google / .docx / .pdf) để hướng dẫn thực hành của bạn.
- Mẹo chuyên nghiệp: Quay lại chế độ Drive để được trợ giúp nếu nhóm của bạn gặp sự cố khi mã hóa. Bạn có thể lái xe chậm nếu cần để giúp bạn xác định thông tin cụ thể về góc hoặc khoảng cách của robot.
Bước 4: Khám phá chuyển động theo góc! Bây giờ là lúc khám phá cách cải thiện chuyển động của robot quanh thùng. Sử dụng thói quen sau đây khi bạn chọn một điều để cải thiện và lặp lại tại một thời điểm:
- Dự đoán
- Bắt đầu với vị trí đầu tiên bạn muốn robot tiếp cận. Bạn nghĩ robot sẽ cần di chuyển theo góc nào để đến được vị trí đó? Hợp tác để đưa ra dự đoán nhóm bằng cách sử dụng câu gốc này và ghi lại vào nhật ký của bạn:
- Chúng tôi nghĩ góc này khoảng ____________ độ.
- Bắt đầu với vị trí đầu tiên bạn muốn robot tiếp cận. Bạn nghĩ robot sẽ cần di chuyển theo góc nào để đến được vị trí đó? Hợp tác để đưa ra dự đoán nhóm bằng cách sử dụng câu gốc này và ghi lại vào nhật ký của bạn:
- Lái xe
- Kiểm tra dự đoán của bạn bằng cách lái robot theo góc dự đoán. Nó có di chuyển theo cách bạn mong đợi không? Nếu cảm thấy không ổn, bạn có thể thay đổi gì để nó chính xác hơn? Nếu không thì điều gì khiến bạn cảm thấy đúng về nó?
- Đo lường
- Đặt thước đo góc Robot của bạn bên dưới robot. Bạn thực sự lái robot ở góc nào?
- Mã số
- Sử dụng góc nhìn mới của bạn trong dự án mã hóa! Điều chỉnh dự án của bạn, sau đó chạy thử nghiệm. Robot có di chuyển theo cách bạn muốn không? Nếu không, hãy sử dụng Thước đo góc Robot để thay đổi góc và thử lại. Hãy nhớ ghi lại các phép đo góc và quan sát của bạn vào nhật ký trong quá trình thực hiện.
Tài nguyên thực hành:
Các bài viết được liên kết ở đây có sẵn nếu bạn cần hỗ trợ thêm trong khi thực hiện hoạt động.
Bây giờ bạn đã xem và thảo luận về video, đến lượt bạn thực hành!
Bước 1: Thiết lập trường như hình dưới đây.
Bước 2: Sử dụng chế độ Lái xe để mô phỏng các chuyển động mà robot của bạn cần để hoàn thành nhiệm vụ.
- Nhiệm vụ của bạn là lái robot đi vòng quanh thùng màu cam. Ghi lại quá trình lái xe của bạn, sau đó lập kế hoạch mã hóa chuyển động đó.
- Sử dụng thẻ nhiệm vụ này (Google / .docx / .pdf) để hướng dẫn thực hành của bạn.
- Mẹo chuyên nghiệp: Hãy nghĩ lại các chiến lược xác định góc quay trong video. Hãy chú ý đến từng góc độ và khoảng cách, và ghi chép chúng một cách chi tiết để lập kế hoạch cho đường đi. Sử dụng Thước đo góc Robot , được hiển thị trong video, để xác định các góc đó khi lập kế hoạch cho đường đi của bạn.
Bước 3: Lập trình cho robot để hoàn thành nhiệm vụ.
- Nhiệm vụ của bạn là sử dụng sơ đồ đường đi từ Bước 2 để lập trình cho robot di chuyển xung quanh thùng màu cam.
- Sử dụng thẻ nhiệm vụ này (Google / .docx / .pdf) để hướng dẫn thực hành của bạn.
- Mẹo chuyên nghiệp: Quay lại chế độ Drive để được trợ giúp nếu nhóm của bạn gặp sự cố khi mã hóa. Bạn có thể lái xe chậm nếu cần để giúp bạn xác định thông tin cụ thể về góc hoặc khoảng cách của robot.
Bước 4: Khám phá chuyển động theo góc! Bây giờ là lúc khám phá cách cải thiện chuyển động của robot quanh thùng. Sử dụng thói quen sau đây khi bạn chọn một điều để cải thiện và lặp lại tại một thời điểm:
- Dự đoán
- Bắt đầu với vị trí đầu tiên bạn muốn robot tiếp cận. Bạn nghĩ robot sẽ cần di chuyển theo góc nào để đến được vị trí đó? Hợp tác để đưa ra dự đoán nhóm bằng cách sử dụng câu gốc này và ghi lại vào nhật ký của bạn:
- Chúng tôi nghĩ góc này khoảng ____________ độ.
- Bắt đầu với vị trí đầu tiên bạn muốn robot tiếp cận. Bạn nghĩ robot sẽ cần di chuyển theo góc nào để đến được vị trí đó? Hợp tác để đưa ra dự đoán nhóm bằng cách sử dụng câu gốc này và ghi lại vào nhật ký của bạn:
- Lái xe
- Kiểm tra dự đoán của bạn bằng cách lái robot theo góc dự đoán. Nó có di chuyển theo cách bạn mong đợi không? Nếu cảm thấy không ổn, bạn có thể thay đổi gì để nó chính xác hơn? Nếu không thì điều gì khiến bạn cảm thấy đúng về nó?
- Đo lường
- Đặt thước đo góc Robot của bạn bên dưới robot. Bạn thực sự lái robot ở góc nào?
- Mã số
- Sử dụng góc nhìn mới của bạn trong dự án mã hóa! Điều chỉnh dự án của bạn, sau đó chạy thử nghiệm. Robot có di chuyển theo cách bạn muốn không? Nếu không, hãy sử dụng Thước đo góc Robot để thay đổi góc và thử lại. Hãy nhớ ghi lại các phép đo góc và quan sát của bạn vào nhật ký trong quá trình thực hiện.
Tài nguyên thực hành:
Các bài viết được liên kết ở đây có sẵn nếu bạn cần hỗ trợ thêm trong khi thực hiện hoạt động.
Đặt kỳ vọng vào công việc nhóm ngay từ đầu. Để tìm hiểu thêm về vai trò cộng tác trong lập trình, xem bài viết này về lập trình theo cặp. Đặt những câu hỏi như:
- Nhóm của bạn sẽ bắt đầu hoạt động này như thế nào?
- Bạn sẽ đảm bảo mọi người đều đóng góp vào việc lái xe và lập trình như thế nào?
Phát thẻ nhiệm vụ Bước 2 cho mỗi học sinh (Google / .docx / .pdf). Hãy nhớ rằng, mục tiêu của việc điều khiển robot hoàn thành nhiệm vụ là để học sinh phát triển mô hình vật lý của nhiệm vụ, từ đó các em sẽ xây dựng mô hình tính toán khi bắt đầu viết mã. Đảm bảo rằng tất cả học viên đều dành thời gian cần thiết để lái xe, ghi chép và lập kế hoạch trong phần lái xe của Thực hành có hướng dẫn. Việc hình thành thói quen tốt với những nhiệm vụ đơn giản sẽ giúp ích cho việc thực hiện các nhiệm vụ phức tạp hơn sau này. Để tìm hiểu thêm về cách tạo điều kiện cho sinh viên chuyển đổi giữa việc lái xe và lập trình, xem bài viếtcủa Thư viện VEX này.
Học sinh được khuyến khích sử dụng Robot Protractor in ra khi lập kế hoạch cho đường đi của mình. Nếu học sinh không có máy in, hãy in tài liệu này cho các em.
Khi học viên hoàn thành bài thực hành lái xe, sẽ đi quanh phòng và hỏi thăm học viên về việc học của họ. Đặt câu hỏi như:
- Bạn chú ý đến điều gì khi lái xe mà bạn nghĩ sẽ giúp bạn viết mã? Tại sao điều đó lại quan trọng với bạn?
- Mọi người có lái xe và ghi chép theo cùng một cách không? Điểm giống và khác nhau là gì? Làm thế nào bạn có thể kết hợp các ý tưởng của mình thành một kế hoạch chung?
Phát thẻ nhiệm vụ Bước 3 cho mỗi học viên sau khi họ đáp ứng các tiêu chí thành công khi lái xe và chia sẻ kế hoạch lộ trình của mình với bạn (Google / .docx / .pdf). Sau đó, học sinh sẽ sử dụng kế hoạch của mình làm cơ sở để xây dựng dự án VEXcode. Khuyến khích học viên bổ sung vào tài liệu hướng dẫn lái xe khi xây dựng và thử nghiệm các dự án của mình, để giúp họ xác định chiến lược và chi tiết nào hữu ích nhất. Nhắc nhở học sinh rằng họ có thể quay lại lái xe bất cứ lúc nào để giúp họ lập trình dự án thành công.
Trong khi học sinh đang lập trình robot, sẽ đi quanh phòng và thảo luận với học sinh để tìm hiểu về tiến trình lập trình và hiểu biết của các em. Đặt những câu hỏi như:
- Bạn làm thế nào để robot di chuyển quanh thùng bằng cách sử dụng các góc?
- Làm thế nào để đảm bảo các góc được chính xác và đúng?
- Nhóm của bạn đã hợp tác như thế nào để cùng nhau hoàn thành nhiệm vụ này?
Bước 4 được thiết kế để thúc đẩy sự lặp lại và khám phá của sinh viên bằng cách chuyển đổi giữa lái xe và lập trình để cải thiện các dự án của họ và tìm ra chiến lược tốt nhất cho nhiệm vụ. Học sinh nên sử dụng quy trình Dự đoán-Lái xe-Đo lường-Mã hóa để giúp các em cải thiện từng yếu tố một về chuyển động của rô-bốt tại một thời điểm. Sau đó, họ nên lặp lại quy trình này nhiều lần để cải thiện dự án của mình. Để tạo điều kiện thuận lợi cho quá trình này, hãy đặt những câu hỏi như:
- Kết quả thử nghiệm có khớp với dự đoán của bạn không? Bạn cần phải điều chỉnh những gì?
- Việc dự đoán góc lái trước khi lái xe giúp bạn lập trình robot chính xác như thế nào?
- Việc lập trình giúp ích gì cho việc lái xe của bạn? Lái xe có ích gì cho việc lập trình của bạn?
Tóm tắt
Bây giờ bạn đã thực hành xong, đã đến lúc chia sẻ những gì bạn đã học được. Trả lời các câu hỏi sau vào nhật ký để giúp bạn suy ngẫm về việc học của mình và chuẩn bị cho cuộc thảo luận toàn lớp:
- Bạn đã học được điều gì khi lái xe giúp ích cho việc lập trình của bạn? Bạn đã ghi chép lại quá trình học tập đó như thế nào?
- Bạn đã học được điều gì về cách xác định góc?
Bây giờ bạn đã thực hành xong, đã đến lúc chia sẻ những gì bạn đã học được. Trả lời các câu hỏi sau vào nhật ký để giúp bạn suy ngẫm về việc học của mình và chuẩn bị cho cuộc thảo luận toàn lớp:
- Bạn đã học được điều gì khi lái xe giúp ích cho việc lập trình của bạn? Bạn đã ghi chép lại quá trình học tập đó như thế nào?
- Bạn đã học được điều gì về cách xác định góc?
Hướng dẫn học sinh chia sẻ kiến thức của mình trong buổi thảo luận toàn lớp. Giúp học sinh suy ngẫm về việc học của mình để xây dựng sự hiểu biết chung và mục tiêu học tập.
Sử dụng những câu hỏi mà học sinh đã trả lời trong nhật ký làm điểm khởi đầu cho cuộc thảo luận. Khi bạn lắng nghe những đóng góp của học sinh, hãy đặt những câu hỏi tiếp theo để hướng dẫn sự hiểu biết của họ:
- Nếu ai đó hỏi bạn góc là gì, bạn có thể giải thích thế nào?
- Bạn tìm góc và khoảng cách bằng cách nào? Có những cách nào khác nhau? Có phương pháp nào bạn có thể sử dụng trong các bài học sau không?
- Bạn biết gì về việc lập trình robot mà trước đây bạn chưa biết? Bạn có bằng chứng gì để chứng minh điều đó?
Thêm vào danh sách chung về các phương pháp lập trình trong VEXcode dựa trên thông tin đầu vào của học sinh, để giúp tạo ra các sản phẩm phản ánh sự hiểu biết hiện tại của lớp học.
Chọn Tiếp theo > để chuyển sang bài học tiếp theo.