
الدرس 3: القيادة إلى الرقم "31"
في هذا الدرس، سيقود روبوت الواقع الافتراضي إلى الرقم "31" ثم يعود إلى الرقم "1" في ملعب خريطة شبكة الأرقام!
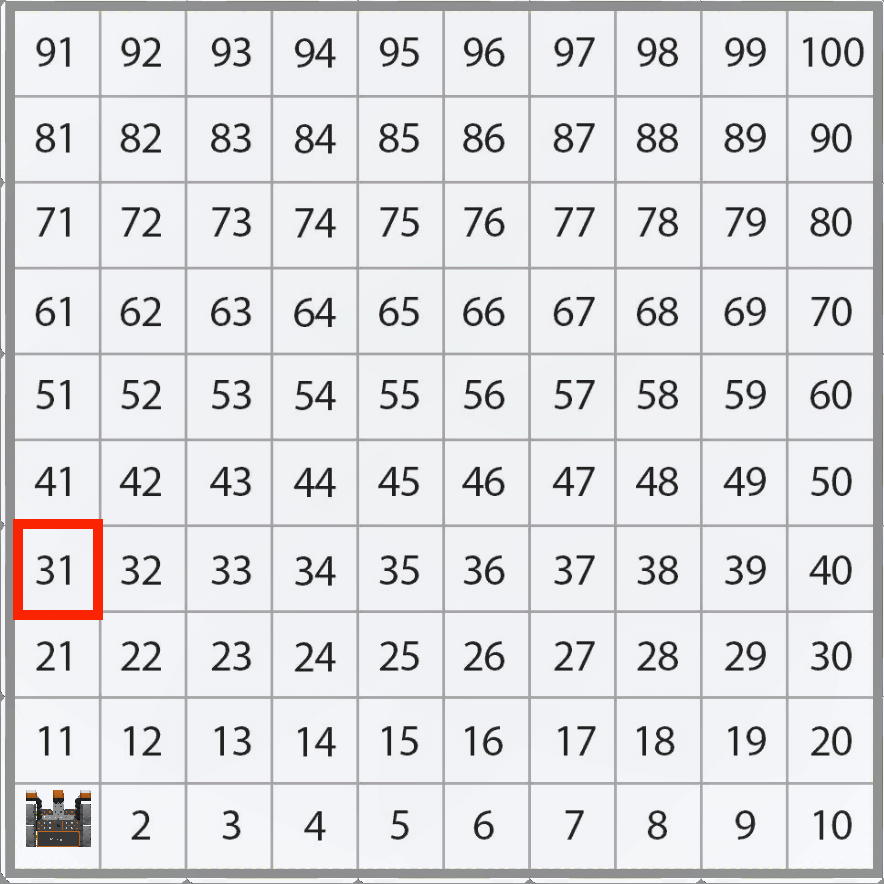
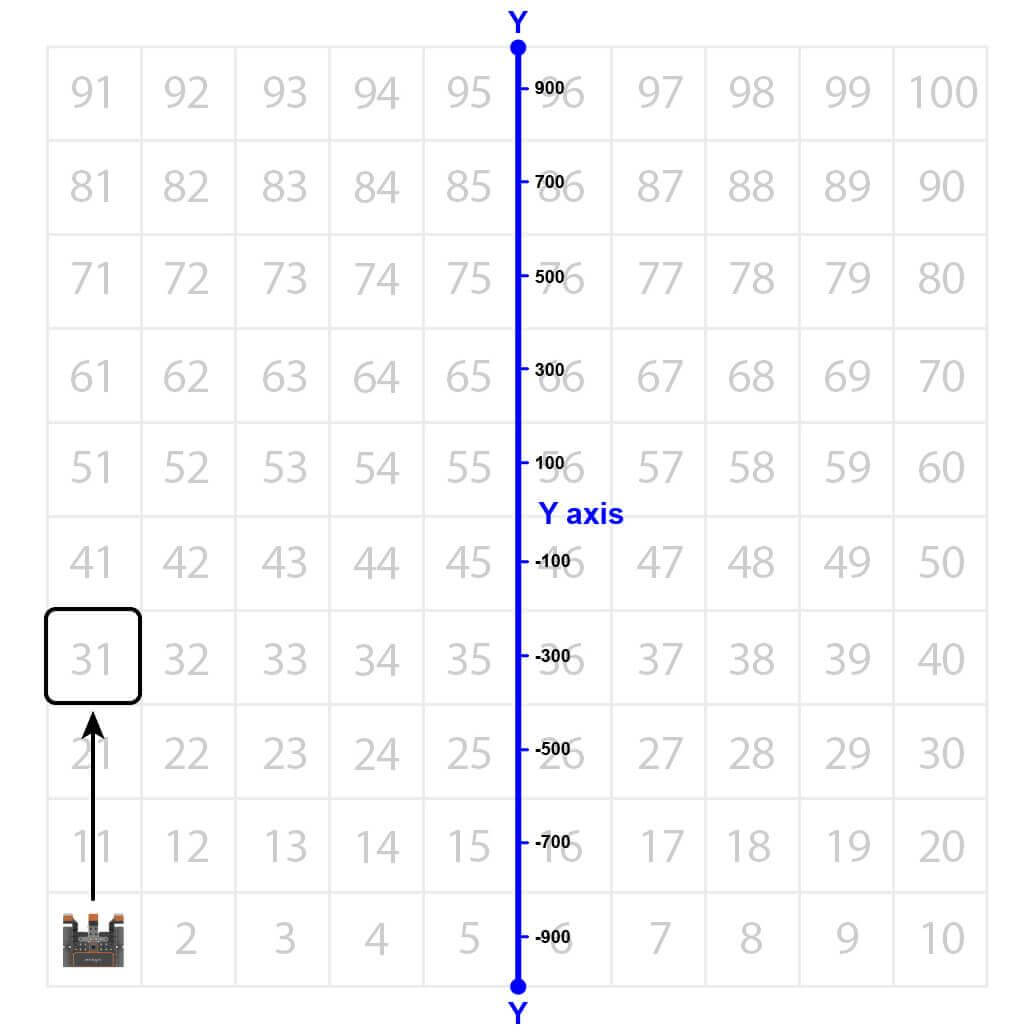
لاحظ أن روبوت الواقع الافتراضي سيسافر على طول المحور Y للانتقال إلى الرقم "31" في ملعب خريطة شبكة الأرقام.
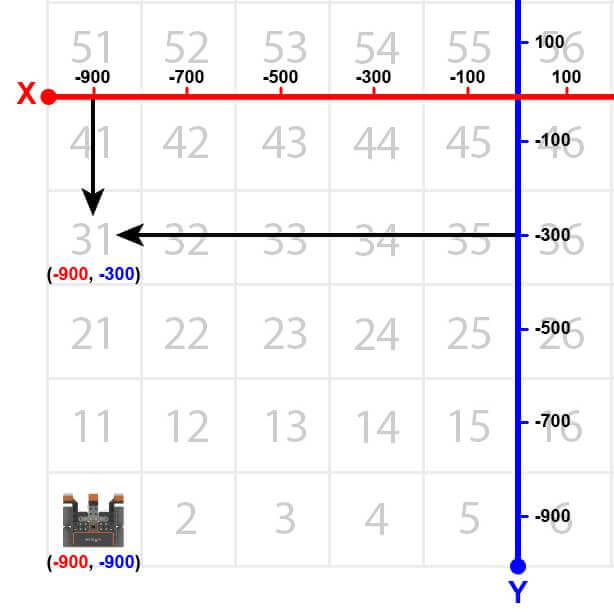
سيقود روبوت الواقع الافتراضي إلى موقع الرقم "31" في ملعب خريطة شبكة الأرقام. ومع ذلك، قبل أن يتمكن روبوت الواقع الافتراضي من الانتقال إلى هذا الرقم، يجب إخبار روبوت الواقع الافتراضي بمكان هذا الرقم. إحداثيات الرقم "31" هي (-900، -300).
-
اسحب كتلة [Drive] غير المنتظرة إلى مساحة العمل.

-
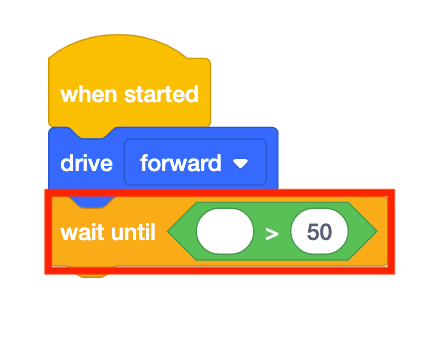
قم بإرفاق كتلة [انتظر حتى] أسفل كتلة [Drive].

-
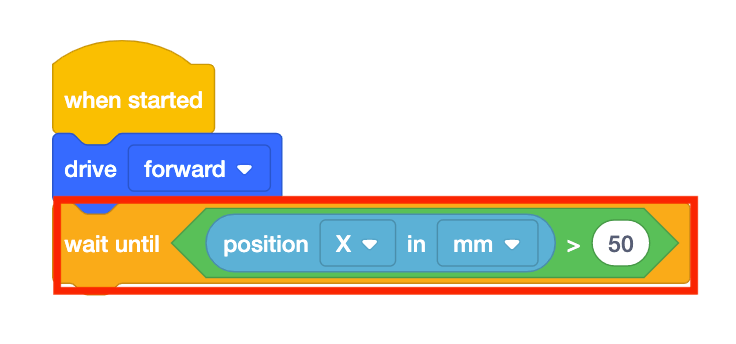
اسحب كتلة المراسل <Greater than> المنطقية إلى كتلة [انتظر حتى].
-
لاحظ أنه يتم استخدام <Greater than> الكتلة بدلاً من <Less than> الكتلة لأن روبوت الواقع الافتراضي يقود لأعلى من أسفل الملعب. يبدأ روبوت الواقع الافتراضي بقيمة Y تبلغ -900 ملليمتر (مم). مع تقدم روبوت الواقع الافتراضي، تزداد قيم Y.
-
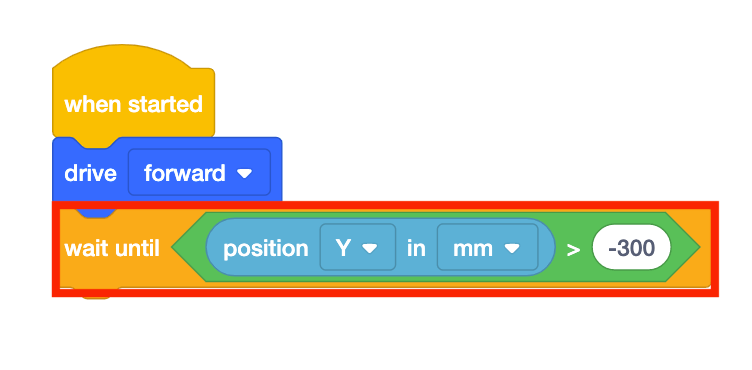
اسحب كتلة (موضع الروبوت) إلى <Greater than> الكتلة.
-
اضبط معلمة كتلة (موضع الروبوت) على "Y" ومعلمة <Greater than> الكتلة على -300.
-
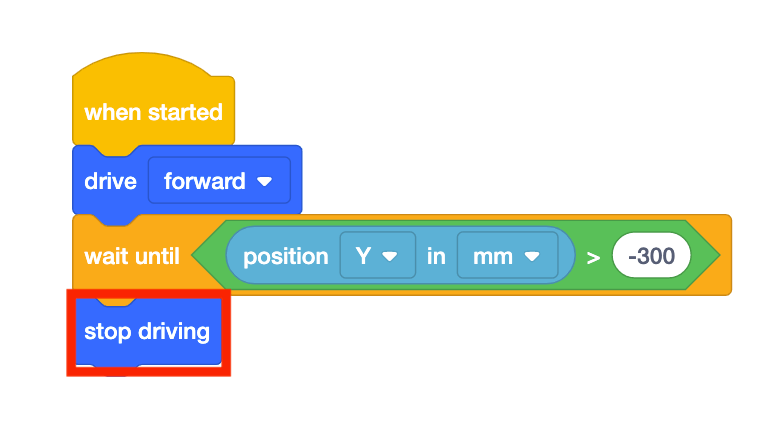
اسحب كتلة [Stop driving] وأضفها إلى المشروع.
- قم بتشغيل ملعب خريطة شبكة الأرقام إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
-
شاهد روبوت الواقع الافتراضي يقود إلى الرقم "31" في ملعب خريطة شبكة الأرقام.

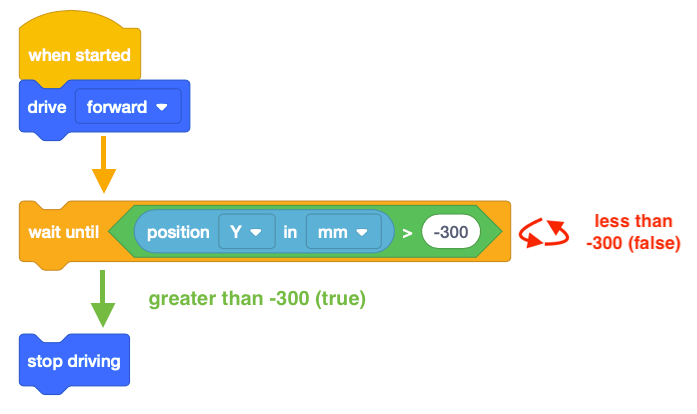
- في هذا المشروع، ينتقل روبوت الواقع الافتراضي إلى الرقم "31" في ملعب خريطة شبكة الأرقام. نظرًا لأن قيم Y تتزايد مع انتقال روبوت الواقع الافتراضي إلى الرقم "31"، يستخدم المشروع <Greater than> كتلة.
- سيتوقف روبوت الواقع الافتراضي بمجرد أن تكون القيمة Y أكبر من القيمة Y للإحداثيات التي يكون عليها الرقم المشار إليه. نظرًا لأن قيمة Y للرقم "31" هي -300، سيتوقف روبوت الواقع الافتراضي عن القيادة بمجرد أن تكون قيمة Y أكبر من -300.
استخدام كتل المفاتيح
في هذا الدرس، تعلمت كيفية استخدام كتلة VEXcode [انتظر حتى] مع شرط منطقي لأمر الروبوت بالانتظار حتى يصل الروبوت إلى موضع أكبر من -300 على محور Y قبل الانتقال إلى السلوك التالي.
توضح الصورة أدناه كتلة VEXcode بجانب كتلة Switch التي تحتوي على أمر Python لنفس السلوكيات.
 داخل كتلة Switch، بينما ليس location.position(Y، MM) >
-300: هو أول أمر Python يتحقق مما إذا كان موضع الروبوت على طول المحور X أكبر من
-300.
داخل كتلة Switch، بينما ليس location.position(Y، MM) >
-300: هو أول أمر Python يتحقق مما إذا كان موضع الروبوت على طول المحور X أكبر من
-300.
يقوم الأمر الثاني ذو المسافة البادئة، الانتظار (5، مللي ثانية)، بإيقاف تنفيذ الحلقة الشرطية مؤقتًا لمدة 5 مللي ثانية.
في VEXcode VR، يتم دائمًا إضافة أمر wait مع الحلقة الشرطية. الغرض من الأمر wait هو التأكد من أن VEXcode VR يمكنه تشغيل المشروع بشكل صحيح كما هو مقصود، نظرًا لطبيعة منصة VEXcode VR المستندة إلى الويب. لا ينبغي أبدًا حذف الأمر wait عند استخدام حلقة شرطية، وإلا فقد لا يعمل مشروعك كما هو مقصود.
في هذا المثال، يتحقق المشروع مما إذا كان موضع الروبوت أكبر من قيمة Y البالغة -300 كل 5 مللي ثانية أم لا. يتم وضع مسافة بادئة لهذا السطر من التعليمات البرمجية أسفل السطر الأول من التعليمات البرمجية لأن هذا الأمر هو السلوك الذي سيتكرر حتى يتم استيفاء الشرط (قيمة إحداثيات Y أكبر من -300).
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.