
Pelajaran 3: Berkendara ke Nomor '31'
Dalam Pelajaran ini, Robot VR akan melaju ke angka '31' dan kemudian kembali ke angka '1' pada Peta Kotak Angka Playground!
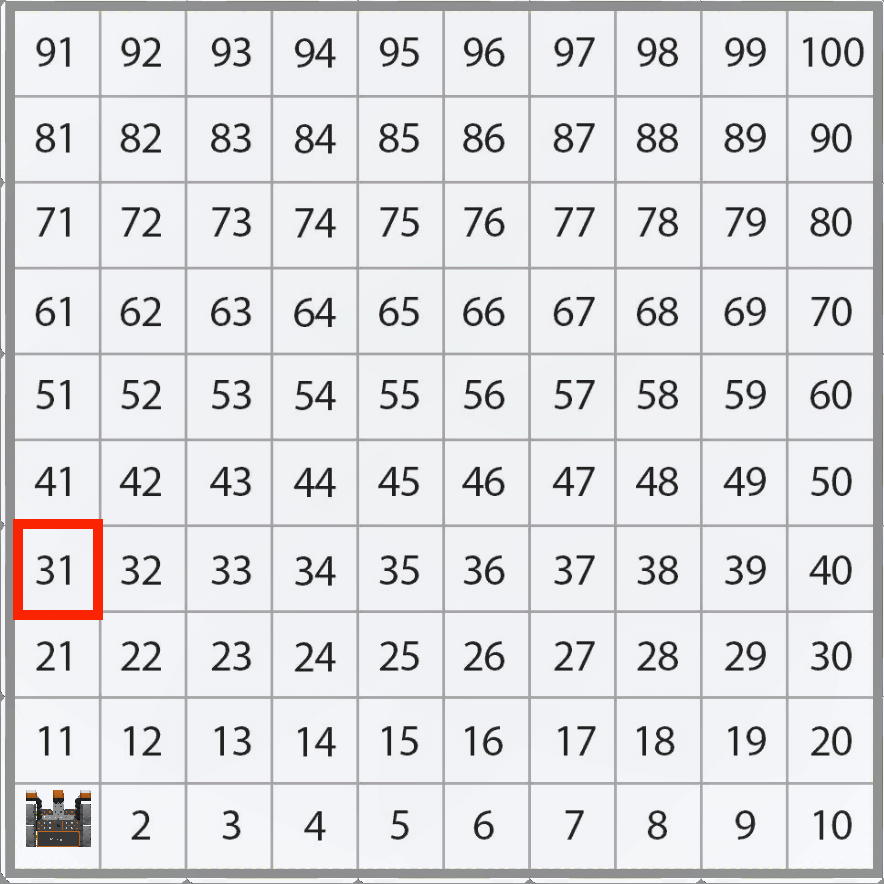
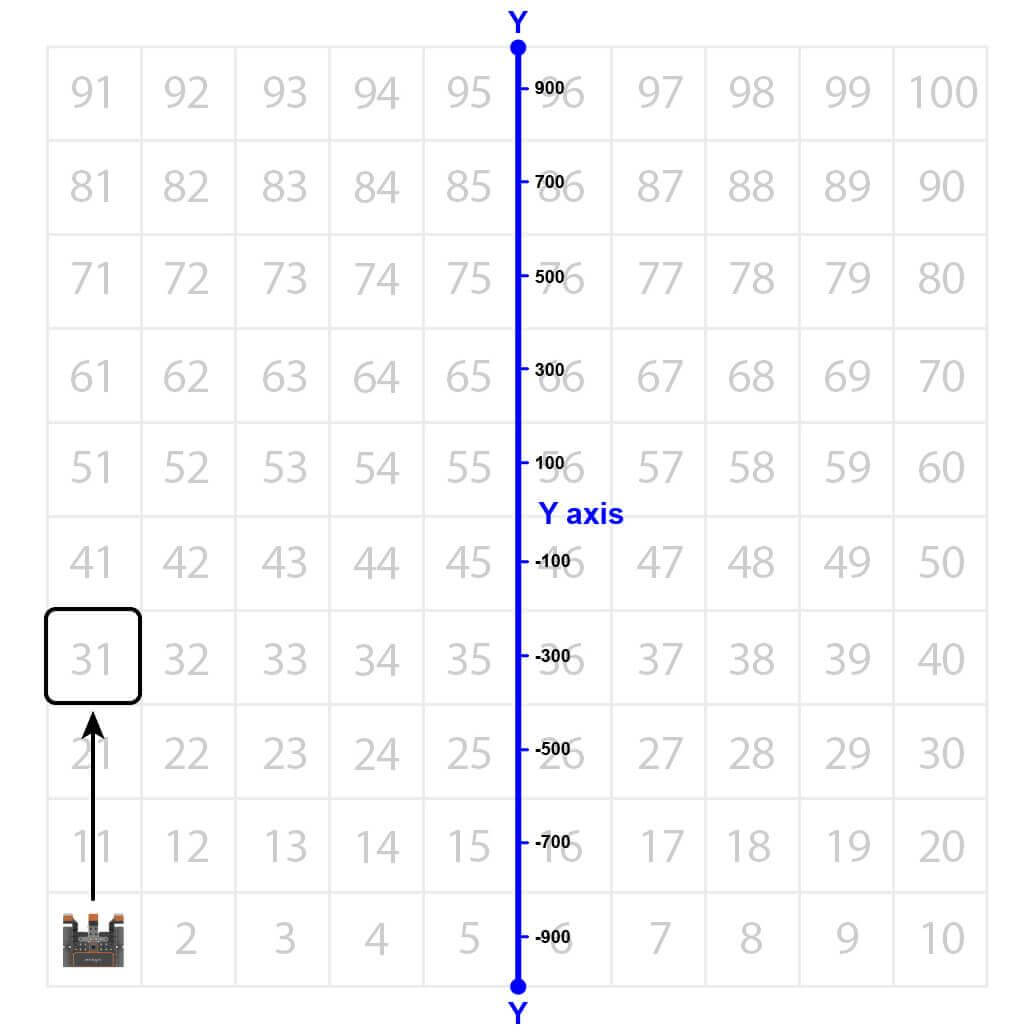
Perhatikan bahwa Robot VR akan bergerak sepanjang sumbu Y untuk bergerak ke angka '31' pada Peta Kotak Angka Playground.
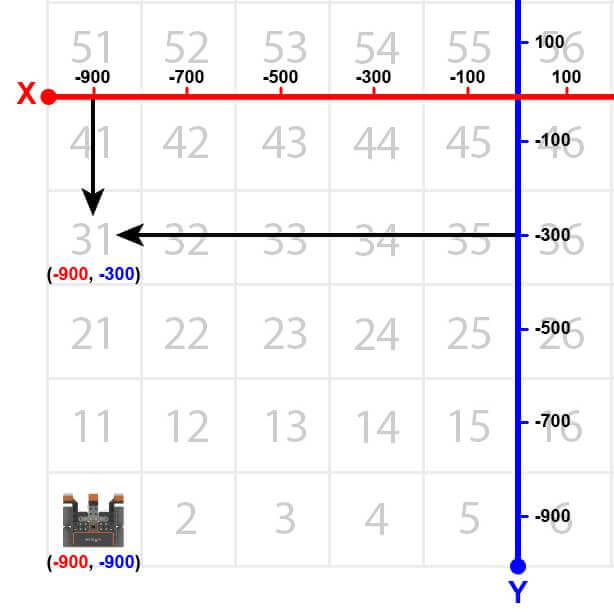
Robot VR akan melaju ke lokasi angka '31' pada Peta Kotak Angka Playground. Akan tetapi, sebelum Robot VR dapat menavigasi ke nomor tersebut, Robot VR harus diberi tahu di mana lokasi nomor tersebut. Koordinat angka '31' adalah (-900, -300).
-
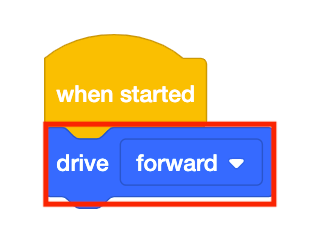
Seret blok [Drive] yang tidak menunggu ke ruang kerja.
-
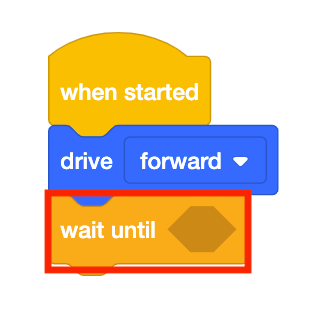
Lampirkan blok [Tunggu hingga] di bawah blok [Berkendara].
-
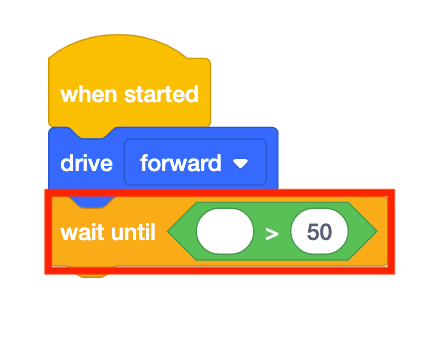
Seret blok reporter Boolean <Greater than> ke blok [Tunggu sampai].
-
Perhatikan bahwa blok <Greater than> digunakan sebagai pengganti blok <Less than> karena Robot VR bergerak dari bawah Taman Bermain. Robot VR dimulai pada nilai Y -900 milimeter (mm). Saat Robot VR melaju ke depan, nilai Y meningkat.
-
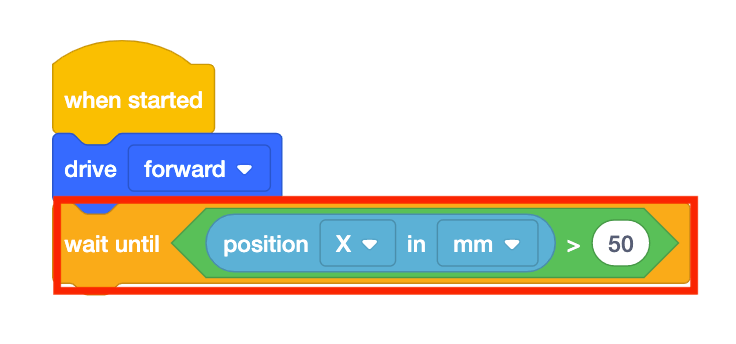
Seret blok (Posisi Robot) ke blok <Greater than>.
-
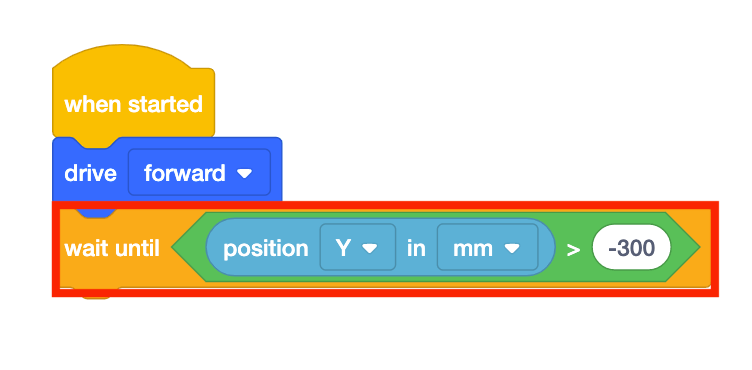
Atur parameter blok (Posisi Robot) ke “Y” dan parameter blok <Greater than> ke -300.
-
Seret blok [Berhenti mengemudi] dan tambahkan ke proyek.
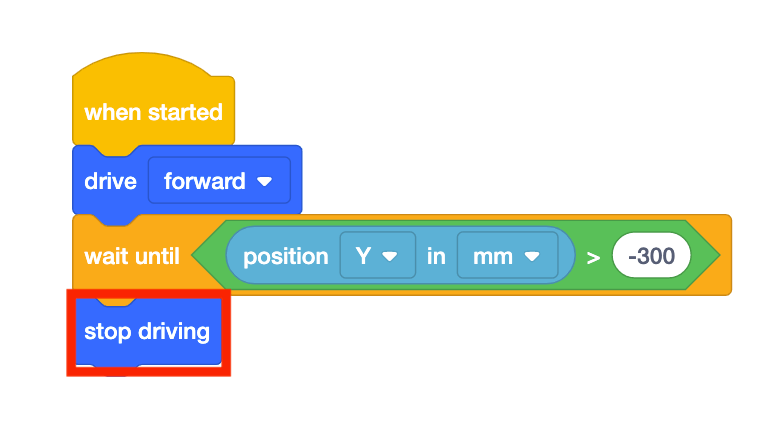
- Luncurkan Number Grid Map Playground jika belum terbuka dan jalankan proyeknya.
-
Saksikan Robot VR melaju ke angka '31' pada Peta Kotak Angka Playground.

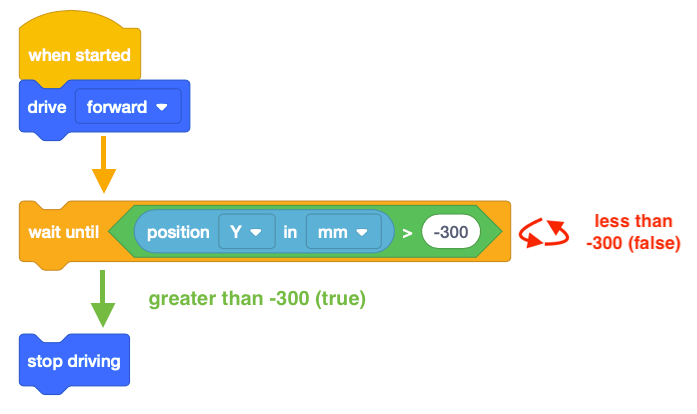
- Dalam proyek ini, Robot VR melaju ke angka '31' pada Peta Kotak Angka Playground. Karena nilai Y meningkat saat Robot VR melaju ke angka '31,' proyek menggunakan blok <Greater than>.
- Robot VR akan berhenti jika nilai Y-nya lebih besar daripada nilai Y koordinat tempat angka yang ditunjukkan berada. Karena nilai Y dari angka '31' adalah -300, Robot VR akan berhenti melaju setelah nilai Y lebih besar dari -300.
Menggunakan Blok Switch
Dalam Pelajaran ini, Anda mempelajari cara menggunakan blok VEXcode [Tunggu hingga] dengan kondisi Boolean untuk memerintahkan robot menunggu hingga robot mencapai posisi lebih besar dari -300 pada sumbu Y sebelum beralih ke perilaku berikutnya.
Gambar di bawah menunjukkan blok VEXcode di samping blok Switch yang berisi perintah Python untuk perilaku yang sama.
 Di dalam blok Switch,sementara bukan location.position(Y, MM) > -300:adalah perintah Python pertama yang memeriksa apakah posisi robot sepanjang sumbu X lebih besar dari -300.
Di dalam blok Switch,sementara bukan location.position(Y, MM) > -300:adalah perintah Python pertama yang memeriksa apakah posisi robot sepanjang sumbu X lebih besar dari -300.
Perintah indentasi kedua,wait (5, MSEC),menghentikan sementara eksekusi loop kondisional selama 5 milidetik.
Dalam VEXcode VR, perintah wait selalu ditambahkan dengan loop kondisional. Tujuan dari perintah wait adalah untuk memastikan bahwa VEXcode VR dapat menjalankan proyek sebagaimana mestinya, mengingat sifat platform VEXcode VR yang berbasis web. Perintah wait tidak boleh dihapus saat menggunakan loop bersyarat, atau proyek Anda mungkin tidak berjalan sebagaimana mestinya.
Dalam contoh ini, proyek memeriksa apakah posisi robot lebih besar dari nilai Y -300 setiap 5 MSEC. Baris kode ini menjorok di bawah baris kode pertama karena perintah ini adalah perilaku yang akan berulang hingga kondisi (nilai koordinat Y lebih besar dari -300) terpenuhi.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.