
Lektion 3: Fahren Sie zur Nummer ‘31’
In dieser Lektion fährt der VR-Roboter zur Nummer ‘31‘ und dann zurück zur Nummer ‘1‘ auf dem Number Grid Map Playground!
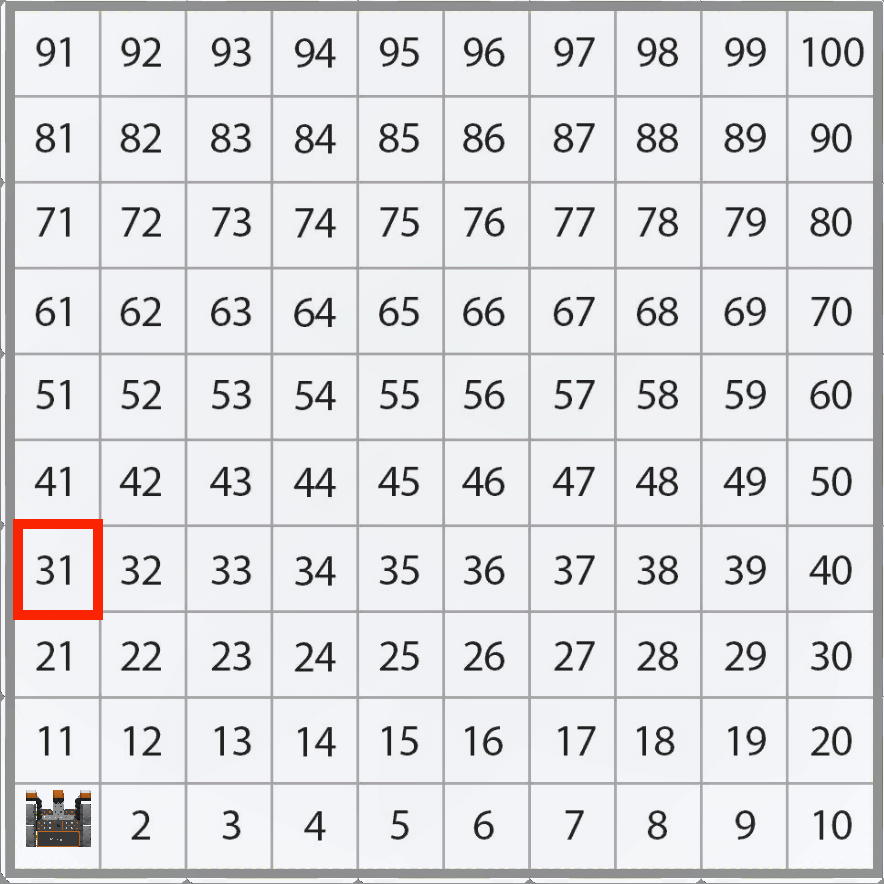
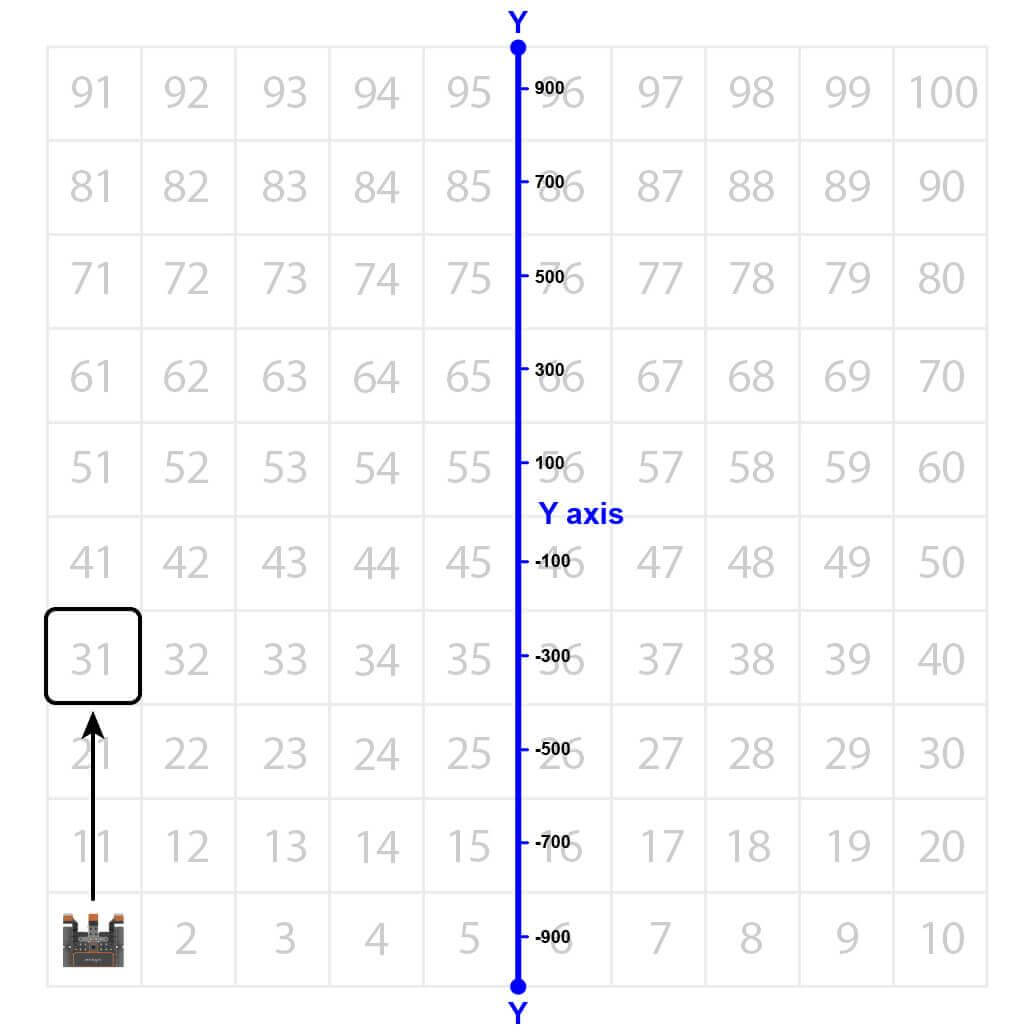
Beachten Sie, dass der VR-Roboter entlang der Y-Achse fährt, um zur Zahl "31" auf dem Zahlenrasterkarten-Spielplatz zugelangen.
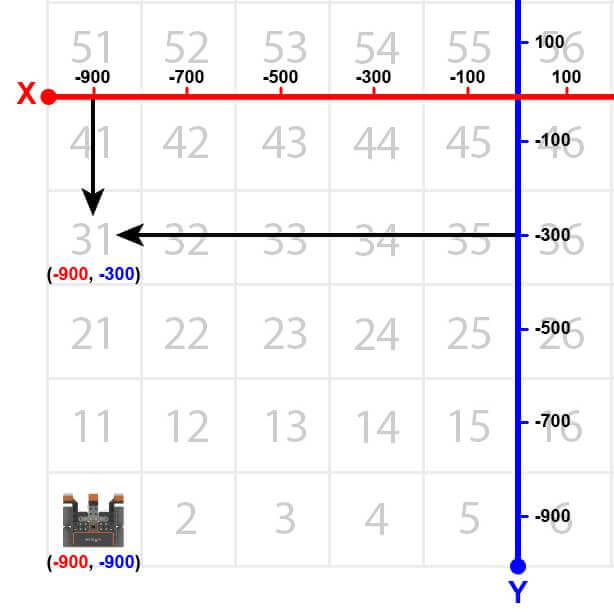
Der VR-Roboter fährt zur Position der Nummer ‘31‘ auf dem Number Grid Map Playground. Bevor der VR-Roboter jedoch zu dieser Nummer navigieren kann, muss dem VR-Roboter mitgeteilt werden, wo sich diese Nummer befindet. Die Koordinaten der Zahl ‘31’ sind (-900, -300).
-
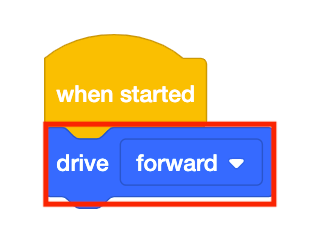
Ziehen Sie den Block [Drive] non-waiting in den Arbeitsbereich.
-
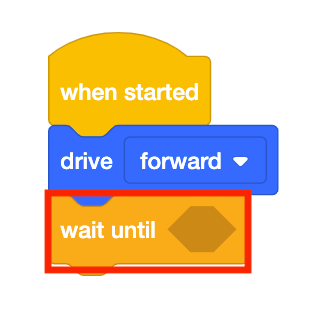
Bringen Sie einen [Warten bis] -Block unter dem [Laufwerk] -Block an.
-
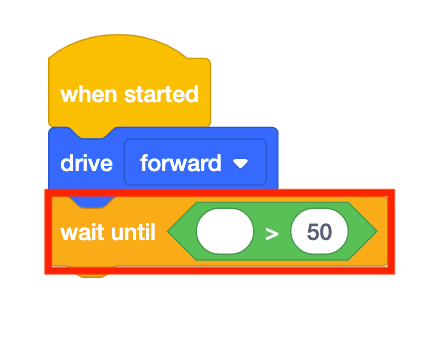
Ziehen Sie den <Greater than> Booleschen Reporterblock in den Block [Warten bis].
-
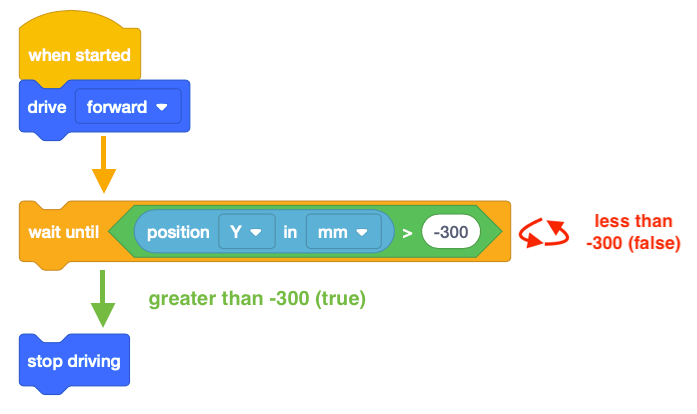
Beachten Sie, dass der <Greater than> Block anstelle des <Less than> Blocks verwendet wird, da der VR-Roboter von der Unterseite des Spielplatzes nach oben fährt. Der VR-Roboter startet bei einem Y-Wert von -900 Millimetern (mm). Wenn der VR-Roboter vorwärts fährt, steigen die Y-Werte.
-
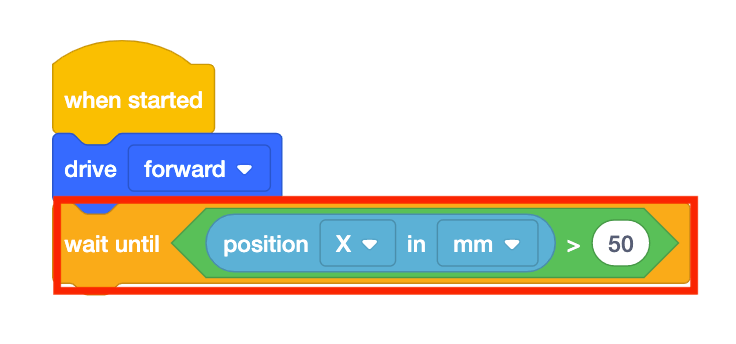
Ziehen Sie den Block (Position des Roboters) in den <Greater than> Block.
-
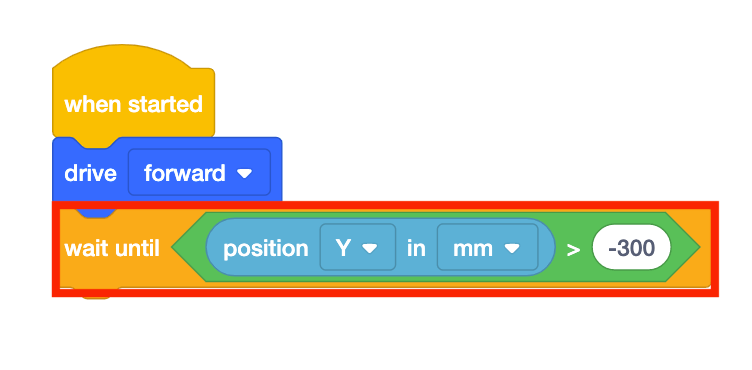
Setzen Sie den Parameter des Blocks (Position des Roboters) auf "Y" und den Parameter des <Greater than> Blocks auf -300.
-
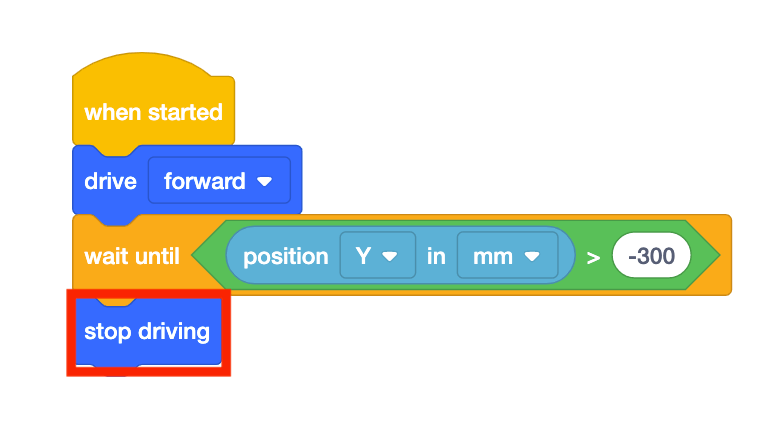
Ziehen Sie einen [Stop driving] -Block ein und fügen Sie ihn dem Projekt hinzu.
- Starten Sie den Number Grid Map Playground , wenn er noch nicht geöffnet ist, und führen Sie das Projekt aus.
-
Beobachten Sie, wie der VR-Roboter auf dem Number Grid Map Playground zur Nummer ‘31’ fährt.

- In diesem Projekt fährt der VR-Roboter zur Nummer ‘31‘ auf dem Number Grid Map Playground. Da die Y-Werte steigen, wenn der VR-Roboter auf die Zahl ‘31‘ fährt, verwendet das Projekt einen <Greater than> Block.
- Der VR-Roboter stoppt, sobald sein Y-Wert größer als der Y-Wert der Koordinate ist, auf der die angegebene Zahl steht. Da der Y-Wert der Zahl ‘31‘ -300 ist, hört der VR-Roboter auf zu fahren, sobald der Y-Wert größer als -300 ist.
Verwenden von Schalterblöcken
In dieser Lektion haben Sie gelernt, wie Sie den Block VEXcode [Warten bis] mit einer booleschen Bedingung verwenden, um dem Roboter zu befehlen, zu warten, bis der Roboter eine Position von mehr als -300 auf der Y-Achse erreicht, bevor Sie zum nächsten Verhalten übergehen.
Die folgende Abbildung zeigt den VEXcode-Block neben dem Switch-Block, der den Python-Befehl für die gleichen Verhaltensweisen enthält.
 Innerhalb des Schalterblocks, obwohl nicht location.position (Y, MM) > -300: ist der erste Python-Befehl, der überprüft, ob die Position des Roboters entlang der X-Achse größer als -300 ist.
Innerhalb des Schalterblocks, obwohl nicht location.position (Y, MM) > -300: ist der erste Python-Befehl, der überprüft, ob die Position des Roboters entlang der X-Achse größer als -300 ist.
Der zweite eingerückte Befehl wait (5, MS) pausiert die Ausführung der bedingten Schleife für 5 Millisekunden.
In VEXcode VR wird immer ein wait-Befehl mit der bedingten Schleife hinzugefügt. Der Zweck des Wait-Befehls besteht darin, sicherzustellen, dass VEXcode VR das Projekt aufgrund der webbasierten Natur der VEXcode VR-Plattform ordnungsgemäß ausführen kann. Der Wait-Befehl sollte niemals gelöscht werden, wenn eine bedingte Schleife verwendet wird, oder Ihr Projekt wird möglicherweise nicht wie beabsichtigt ausgeführt.
In diesem Beispiel prüft das Projekt alle 5 MS, ob die Position des Roboters größer als ein Y-Wert von -300 ist. Diese Codezeile wird unter der ersten Codezeile eingerückt, da dieser Befehl das Verhalten ist, das wiederholt wird, bis die Bedingung (ein Y-Koordinatenwert von größer als -300) erfüllt ist.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.