
Leçon 3 : Conduisez au nombre « 31 »
Dans cette leçon, le robot VR se dirigera vers le numéro « 31 », puis reviendra au numéro « 1 » sur le terrain de jeu de la carte de la grille numérique!
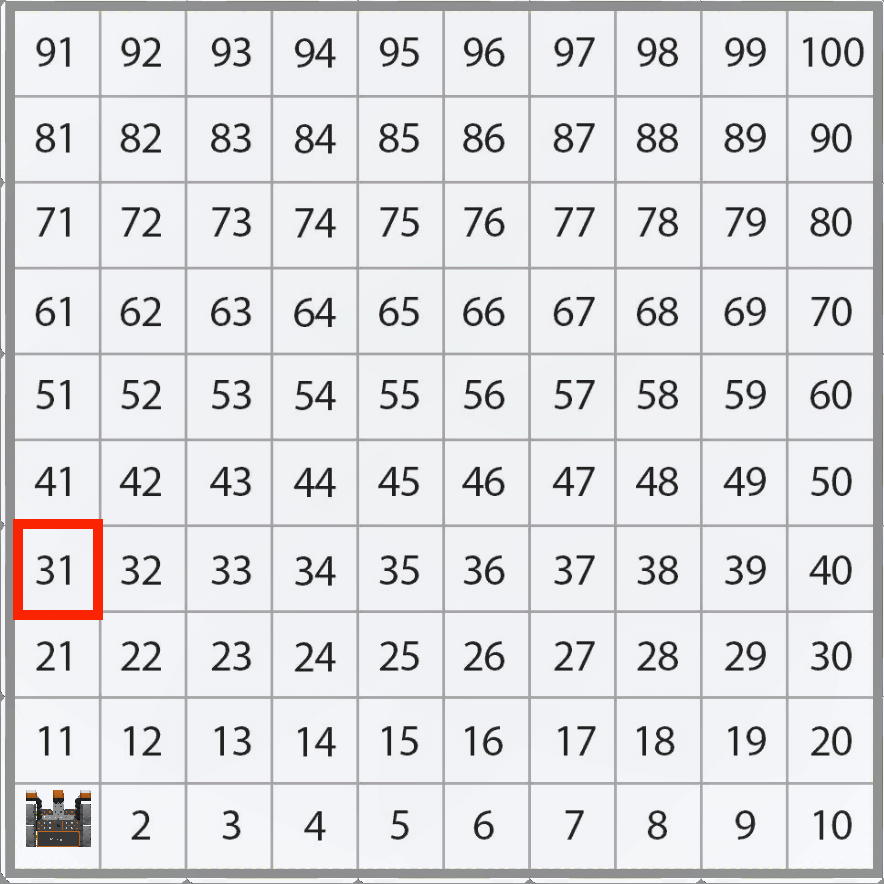
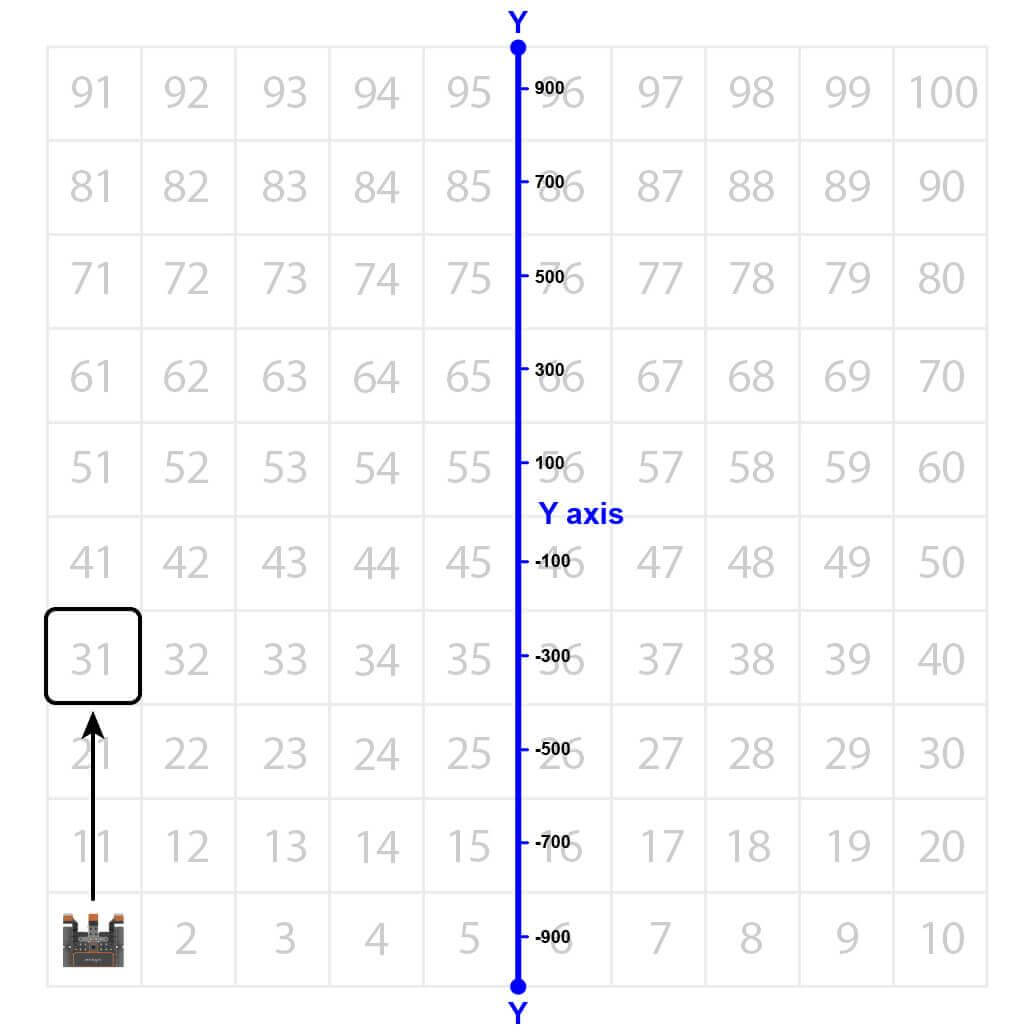
Notez que le robot VR se déplacera le long de l'axe Y pour se déplacer vers le numéro ‘31‘ sur le terrain de jeu de la carte de la grille numérique.
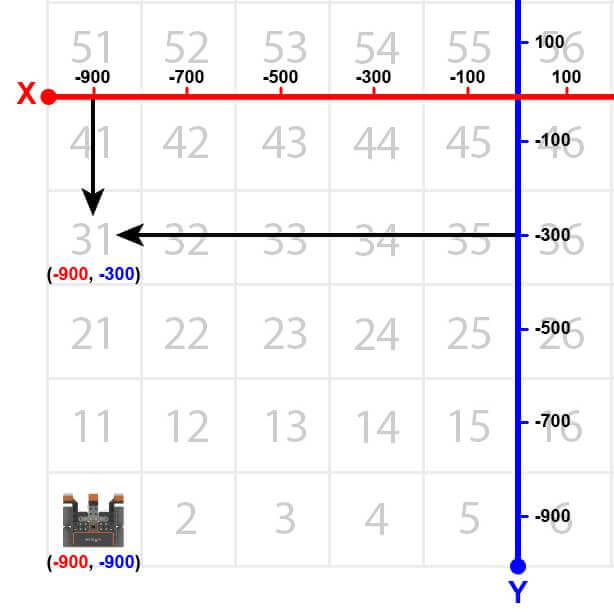
Le robot VR se rendra à l'emplacement du numéro ‘31‘ sur le terrain de jeu de la carte de la grille numérique. Cependant, avant que le robot VR puisse naviguer jusqu'à ce numéro, il faut lui dire où se trouve ce numéro. Les coordonnées du nombre ‘31’ sont (-900, -300).
-
Faites glisser le bloc [Drive] sans attente dans l'espace de travail.
-
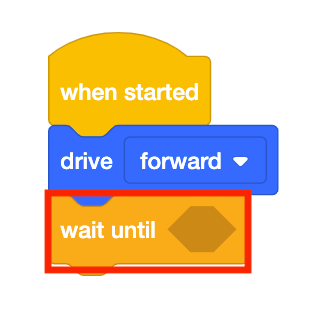
Fixez un bloc [Attendre jusqu'à] sous le bloc [Lecteur].
-
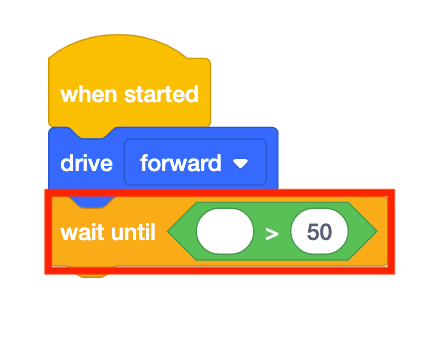
Faites glisser le bloc reporter <Greater than> booléen dans le bloc [Attendre].
-
Notez que le <Greater than> bloc est utilisé à la place du <Less than> bloc car le robot VR remonte du bas de l'aire de jeu. Le robot VR démarre à une valeur Y de -900 millimètres (mm). Au fur et à mesure que le robot VR avance, les valeurs Y augmentent.
-
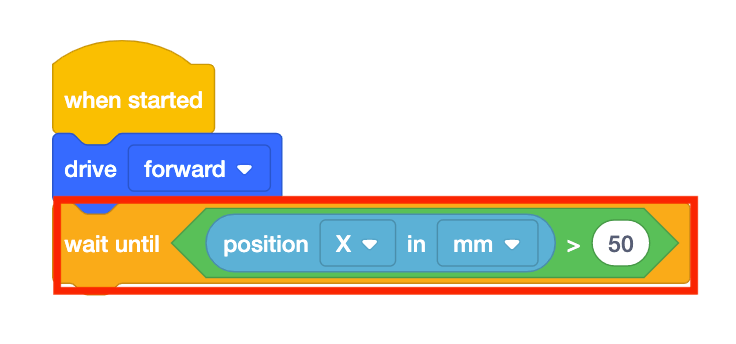
Faites glisser le bloc (Position du robot) dans le <Greater than> bloc.
-
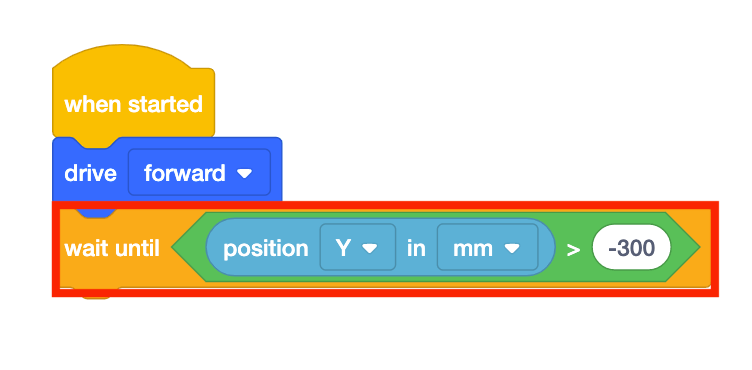
Réglez le paramètre du bloc (Position du robot) sur « Y » et le paramètre du <Greater than> bloc sur -300.
-
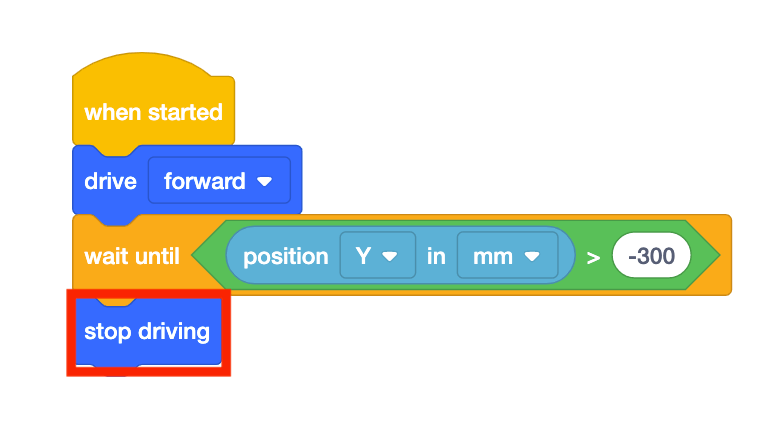
Faites glisser un bloc [Arrêter de conduire] et ajoutez-le au projet.
- Lancez le terrain de jeu Number Grid Map s'il n'est pas déjà ouvert et exécutez le projet.
-
Regardez le lecteur VR Robot jusqu'au numéro ‘31’ sur le terrain de jeu Number Grid Map.

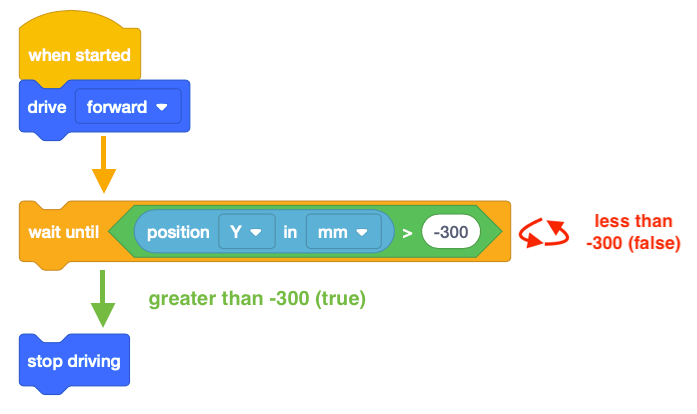
- Dans ce projet, le robot VR se dirige vers le numéro « 31 » sur le terrain de jeu de la carte de la grille numérique. Étant donné que les valeurs Y augmentent à mesure que le robot VR atteint le nombre « 31 », le projet utilise un <Greater than> bloc.
- Le robot VR s'arrêtera une fois que sa valeur Y sera supérieure à la valeur Y de la coordonnée sur laquelle se trouve le nombre indiqué. Étant donné que la valeur Y du nombre « 31 » est de -300, le robot VR cessera de conduire une fois que la valeur Y sera supérieure à -300.
Utilisation des blocs de commutation
Dans cette leçon, vous avez appris à utiliser le bloc VEXcode [Attendre jusqu'à] avec une condition booléenne pour ordonner au robot d'attendre jusqu'à ce que le robot atteigne une position supérieure à -300 sur l'axe Y avant de passer au comportement suivant.
L'image ci-dessous montre le bloc VEXcode à côté du bloc Switch contenant la commande Python pour les mêmes comportements.
 Dans le bloc Switch, bien que non location.position(Y, MM) > -300 : est la première commande Python qui vérifie si la position du robot le long de l'axe X est supérieure à -300.
Dans le bloc Switch, bien que non location.position(Y, MM) > -300 : est la première commande Python qui vérifie si la position du robot le long de l'axe X est supérieure à -300.
La deuxième commande en retrait, wait (5, MSEC), met en pause l'exécution de la boucle conditionnelle pendant 5 millisecondes.
Dans VEXcode VR, une commande wait est toujours ajoutée avec la boucle conditionnelle. L'objectif de la commande wait est de garantir que VEXcode VR peut exécuter correctement le projet comme prévu, en raison de la nature Web de la plate-forme VEXcode VR. La commande wait ne doit jamais être supprimée lors de l'utilisation d'une boucle conditionnelle, sinon votre projet risque de ne pas fonctionner comme prévu.
Dans cet exemple, le projet vérifie si la position du robot est supérieure ou non à une valeur Y de -300 toutes les 5 MS. Cette ligne de code est mise en retrait sous la première ligne de code car cette commande est le comportement qui se répétera jusqu'à ce que la condition (une valeur de coordonnée Y supérieure à -300) soit remplie.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.