
Lección 3: Conducir hasta el número ‘31’
¡En esta lección, el robot VR conducirá hasta el número ‘31‘ y luego volverá al número ‘1‘ en el patio de recreo del mapa de cuadrícula numérica!
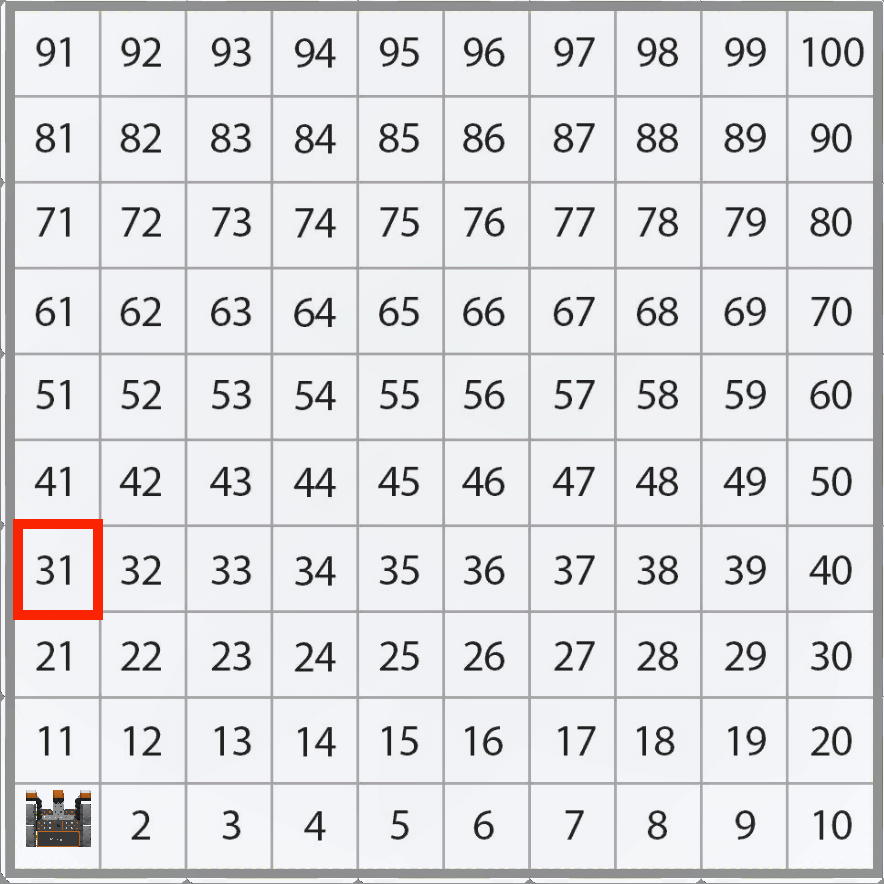
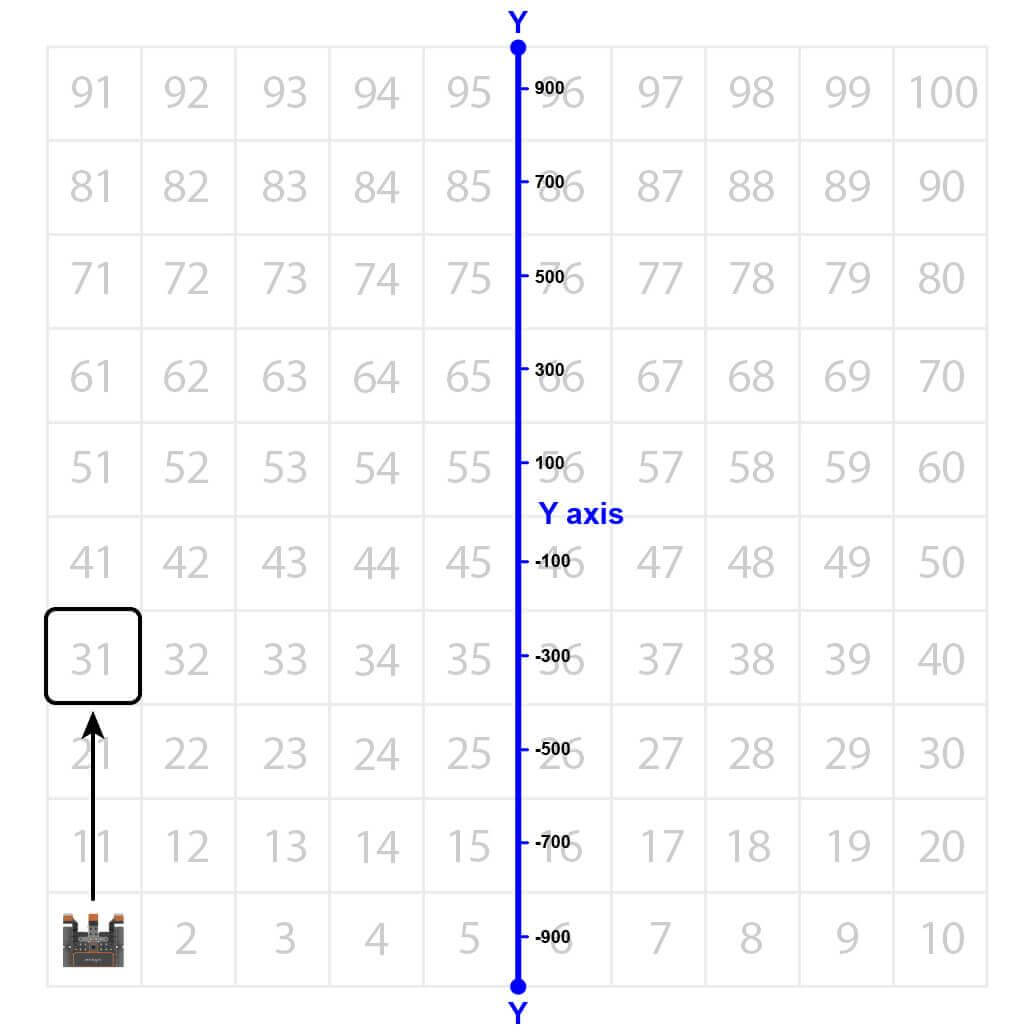
Tenga en cuenta que el robot VR viajará a lo largo del eje Y para moverse al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica.
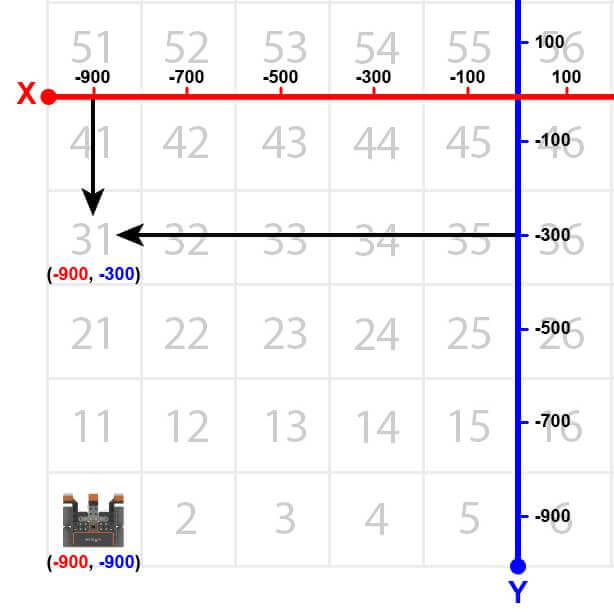
El robot VR conducirá hasta la ubicación del número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica. Sin embargo, antes de que el Robot VR pueda navegar a ese número, se le debe decir al Robot VR dónde está la ubicación de ese número. Las coordenadas del número ‘31’ son (-900, -300).
-
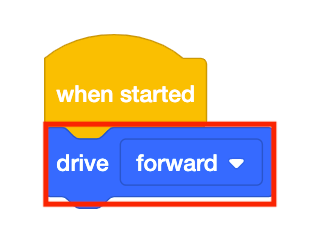
Arrastre el bloque de no espera [Drive] al área de trabajo.
-
Adjunte un bloque [Esperar hasta] debajo del bloque [Conducir].
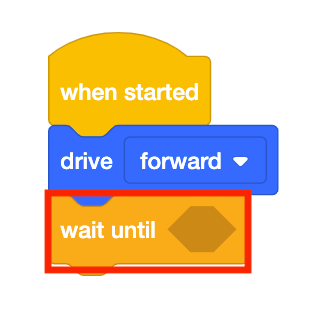
-
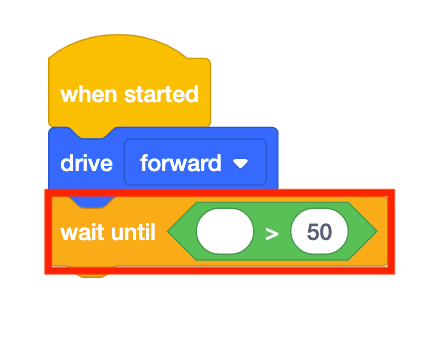
Arrastre el bloque informador <Greater than> booleano al bloque [Esperar hasta].
-
Tenga en cuenta que se utiliza el <Greater than> bloque en lugar del <Less than> bloque porque el robot de realidad virtual está subiendo desde la parte inferior del patio de recreo. El robot VR comienza con un valor Y de -900 milímetros (mm). A medida que el robot VR avanza, los valores Y aumentan.
-
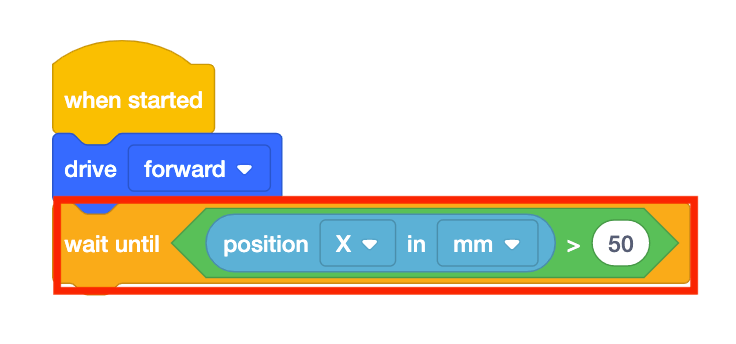
Arrastre el bloque (Posición del robot) al <Greater than> bloque.
-
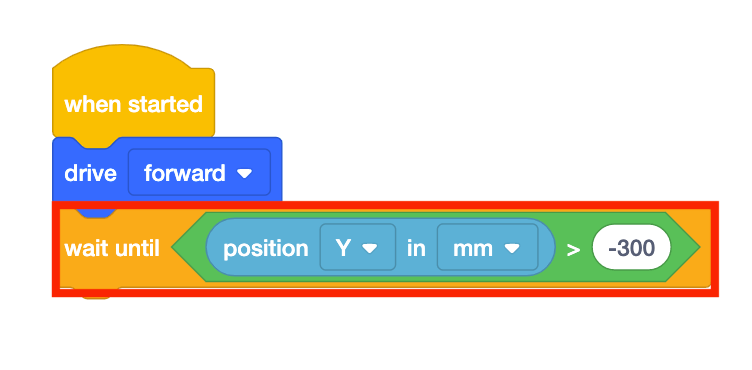
Establezca el parámetro del bloque (Posición del robot) en "Y" y el parámetro del <Greater than> bloque en -300.
-
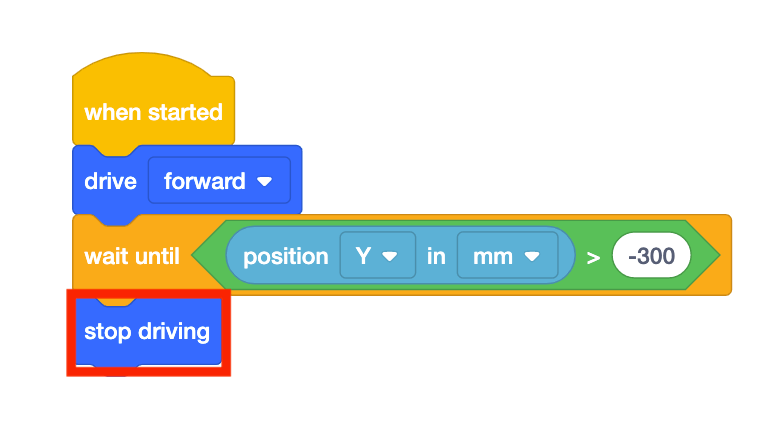
Arrastra un bloque [Stop driving] y añádelo al proyecto.
- Inicie Number Grid Map Playground si aún no está abierto y ejecute el proyecto.
-
Mira la unidad VR Robot al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica.

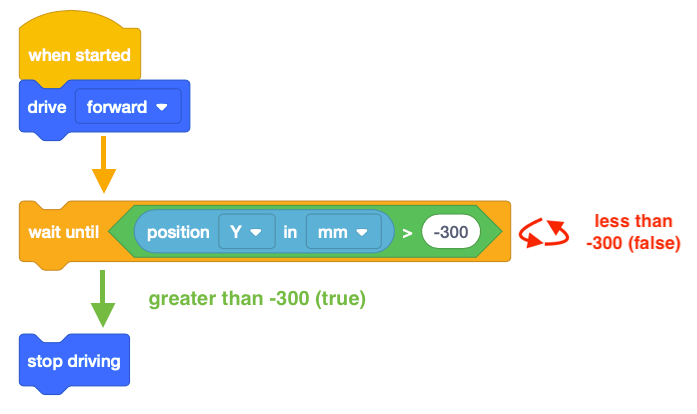
- En este proyecto, el robot VR conduce al número ‘31‘ en el patio de recreo del mapa de cuadrícula numérica. Dado que los valores Y están aumentando a medida que el robot VR llega al número ‘31’, el proyecto utiliza un <Greater than> bloque.
- El robot VR se detendrá una vez que su valor Y sea mayor que el valor Y de la coordenada en la que está el número indicado. Dado que el valor Y del número ‘31’ es -300, el robot VR dejará de funcionar una vez que el valor Y sea mayor que -300.
Uso de bloques de interruptores
En esta lección, aprendió a usar el bloque VEXcode [Esperar hasta] con una condición booleana para ordenar al robot que espere hasta que el robot alcance una posición superior a -300 en el eje Y antes de pasar al siguiente comportamiento.
La siguiente imagen muestra el bloque VEXcode junto al bloque Switch que contiene el comando Python para los mismos comportamientos.
 Dentro del bloque Switch, aunque no location.position (Y, MM) > -300: es el primer comando de Python que comprueba si la posición del robot a lo largo del eje X es mayor que -300.
Dentro del bloque Switch, aunque no location.position (Y, MM) > -300: es el primer comando de Python que comprueba si la posición del robot a lo largo del eje X es mayor que -300.
El segundo comando con sangría, wait (5, MSEC), detiene la ejecución del bucle condicional durante 5 milisegundos.
En VEXcode VR, siempre se agrega un comando wait con el bucle condicional. El propósito del comando wait es garantizar que VEXcode VR pueda ejecutar correctamente el proyecto según lo previsto, debido a la naturaleza basada en web de la plataforma VEXcode VR. El comando wait nunca debe eliminarse cuando se utiliza un bucle condicional, o su proyecto podría no ejecutarse como se espera.
En este ejemplo, el proyecto comprueba si la posición del robot es mayor que un valor Y de -300 cada 5 MS. Esta línea de código está sangrada debajo de la primera línea de código porque este comando es el comportamiento que se repetirá hasta que se cumpla la condición (un valor de coordenada Y mayor que -300).
Seleccione el botón Siguiente para continuar con el resto de esta lección.