
Lezione 3: Guida verso il numero "31"
In questa lezione, il robot VR guiderà al numero "31" e poi di nuovo al numero "1" nel parco giochi della mappa della griglia dei numeri!
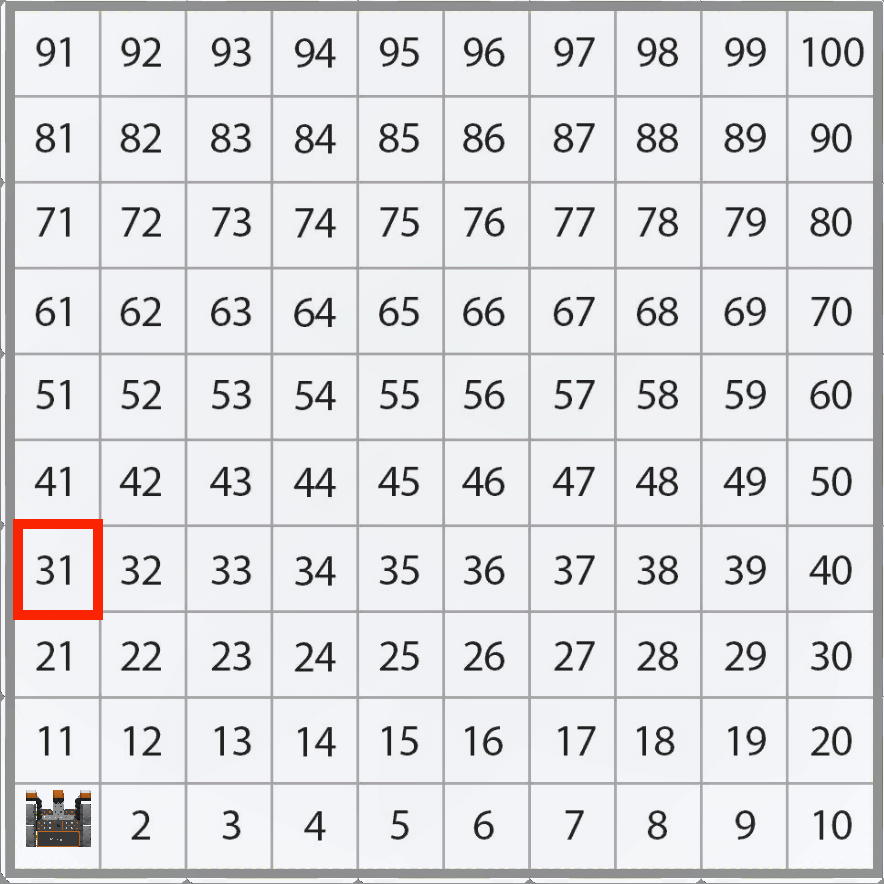
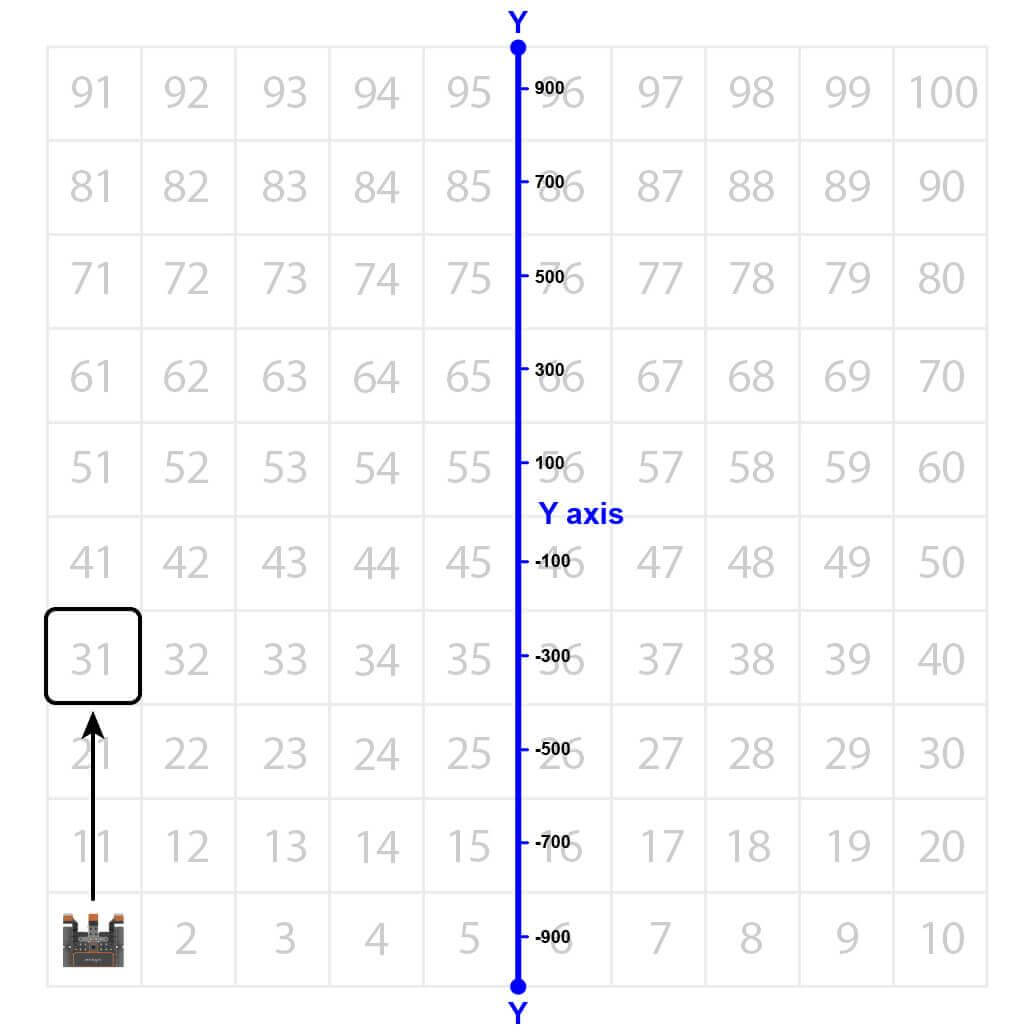
Si noti che il robot VR viaggerà lungo l'asse Y per spostarsi sul numero "31" nel parco giochi della mappa della griglia numerica.
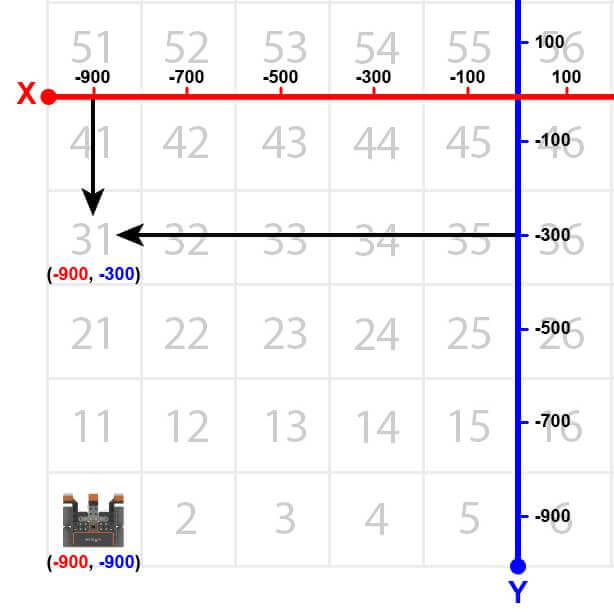
Il robot VR guiderà fino alla posizione del numero "31" nel parco giochi della mappa della griglia numerica. Tuttavia, prima che il robot VR possa raggiungere quel numero, al robot VR deve essere detto dove si trova quel numero. Le coordinate del numero ‘31’ sono (-900, -300).
-
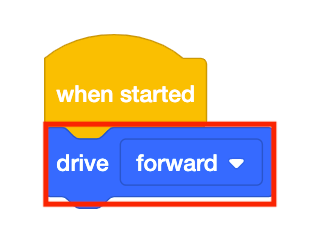
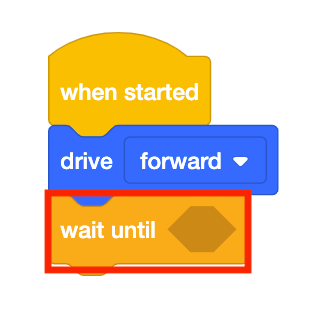
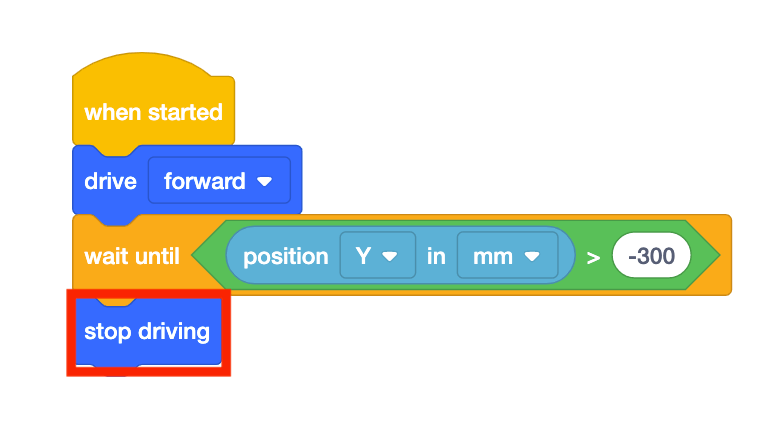
Trascinare il blocco [Drive] non in attesa nell'area di lavoro.
-
Collegare un blocco [Wait until] sotto il blocco [Drive].
-
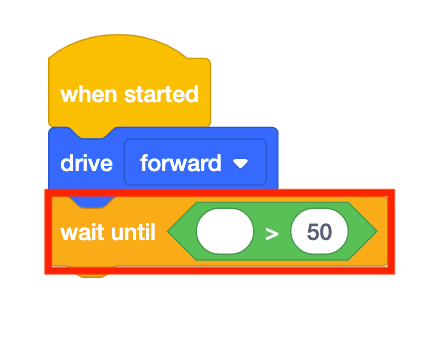
Trascinare il blocco reporter <Greater than> booleano nel blocco [Wait until].
-
Si noti che il <Greater than> blocco viene utilizzato al posto del <Less than> blocco perché il robot VR sta salendo dal fondo del parco giochi. Il robot VR parte da un valore Y di -900 millimetri (mm). Man mano che il robot VR avanza, i valori Y aumentano.
-
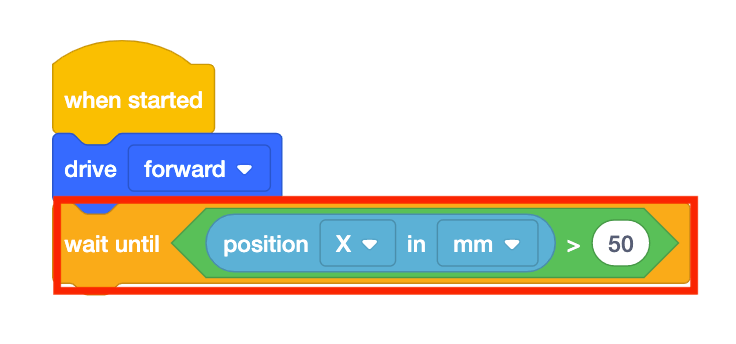
Trascinare il blocco (Posizione del robot) nel <Greater than> blocco.
-
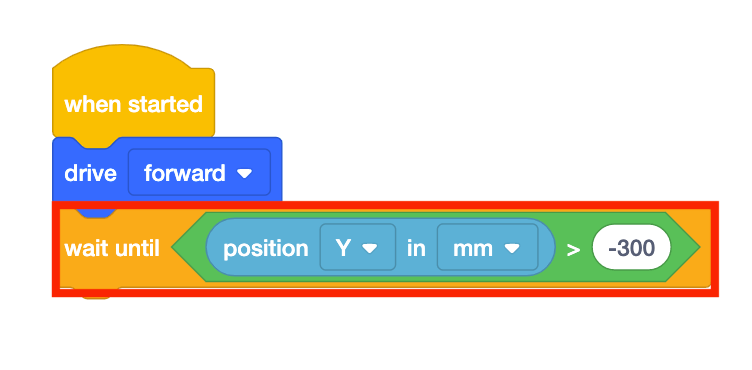
Impostare il parametro del blocco (Posizione del robot) su "Y" e il parametro del <Greater than> blocco su -300.
-
Trascina un blocco [Stop driving] e aggiungilo al progetto.
- Avviare il Number Grid Map Playground se non è già aperto ed eseguire il progetto.
-
Guarda il robot VR guidare al numero "31" nel parco giochi della mappa della griglia numerica.

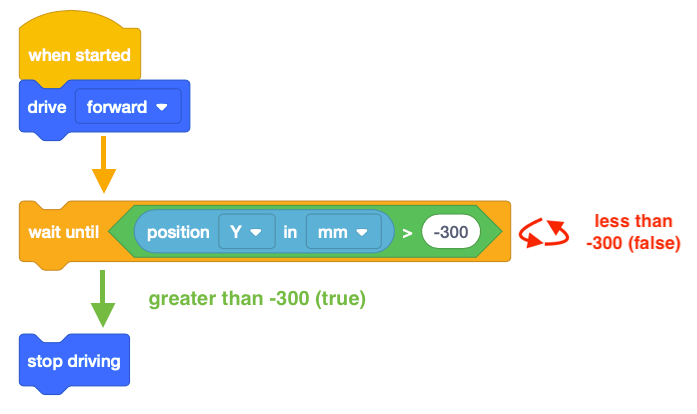
- In questo progetto, il robot VR si sposta sul numero "31" nel parco giochi della mappa della griglia numerica. Poiché i valori Y stanno aumentando man mano che il robot VR raggiunge il numero "31", il progetto utilizza un <Greater than> blocco.
- Il Robot VR si fermerà una volta che il suo valore Y è maggiore del valore Y della coordinata su cui si trova il numero indicato. Poiché il valore Y del numero "31" è -300, il robot VR smetterà di guidare una volta che il valore Y è maggiore di -300.
Utilizzo di blocchi di interruttori
In questa lezione, hai imparato come utilizzare il blocco VEXcode [Attendi fino a] con una condizione booleana per comandare al robot di attendere fino a quando il robot non raggiunge una posizione maggiore di -300 sull'asse Y prima di passare al comportamento successivo.
L'immagine sottostante mostra il blocco VEXcode accanto al blocco Switch contenente il comando Python per gli stessi comportamenti.
 All'interno del blocco Switch, while notlocation.position (Y, MM) > -300: è il primo comando Python che controlla se la posizione del robot lungo l'asse X è maggiore di -300.
All'interno del blocco Switch, while notlocation.position (Y, MM) > -300: è il primo comando Python che controlla se la posizione del robot lungo l'asse X è maggiore di -300.
Il secondo comando rientrato, wait (5, MSEC), mette in pausa l'esecuzione del ciclo condizionale per 5 millisecondi.
In VEXcode VR, un comando wait viene sempre aggiunto con il ciclo condizionale. Lo scopo del comando wait è garantire che VEXcode VR possa eseguire correttamente il progetto come previsto, grazie alla natura basata sul Web della piattaforma VEXcode VR. Il comando wait non dovrebbe mai essere eliminato quando si utilizza un ciclo condizionale, altrimenti il progetto potrebbe non funzionare come previsto.
In questo esempio, il progetto controlla se la posizione del robot è maggiore o meno di un valore Y di -300 ogni 5 MSEC. Questa riga di codice è rientrata sotto la prima riga di codice perché questo comando è il comportamento che si ripeterà fino a quando non verrà soddisfatta la condizione (un valore di coordinata Y maggiore di -300).
Selezionare il pulsante Avanti per continuare con il resto della lezione.