
पाठ 3: नंबर '31' तक ड्राइव करें
इस पाठ में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '31' तक जाएगा और फिर वापस नंबर '1' पर आएगा!
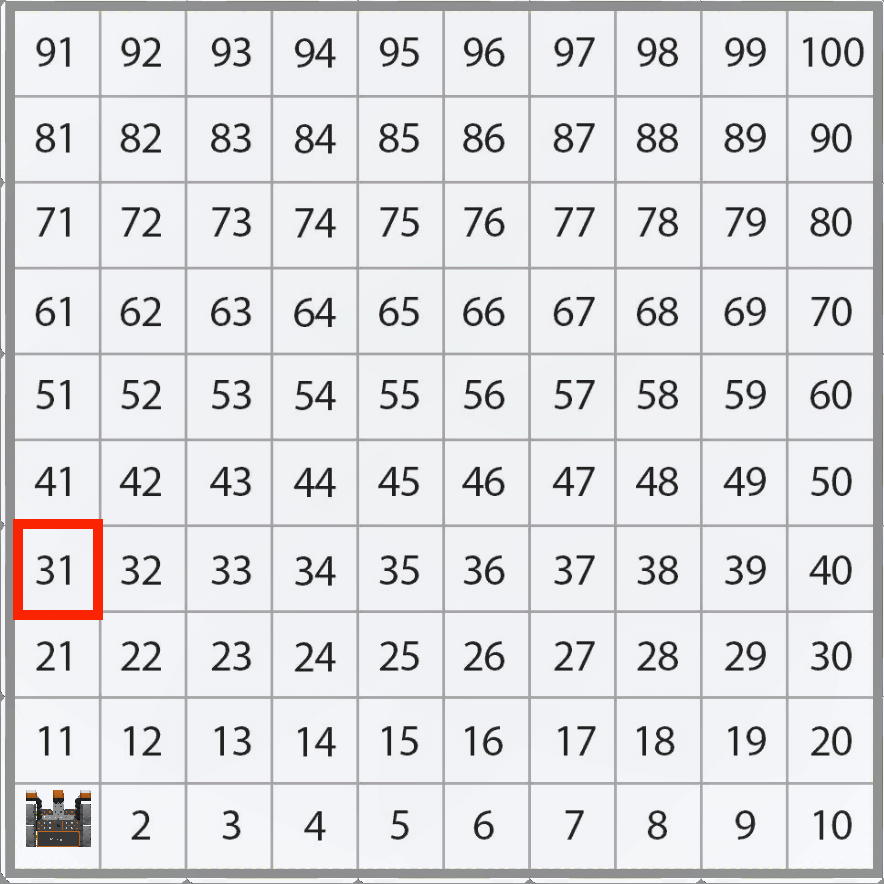
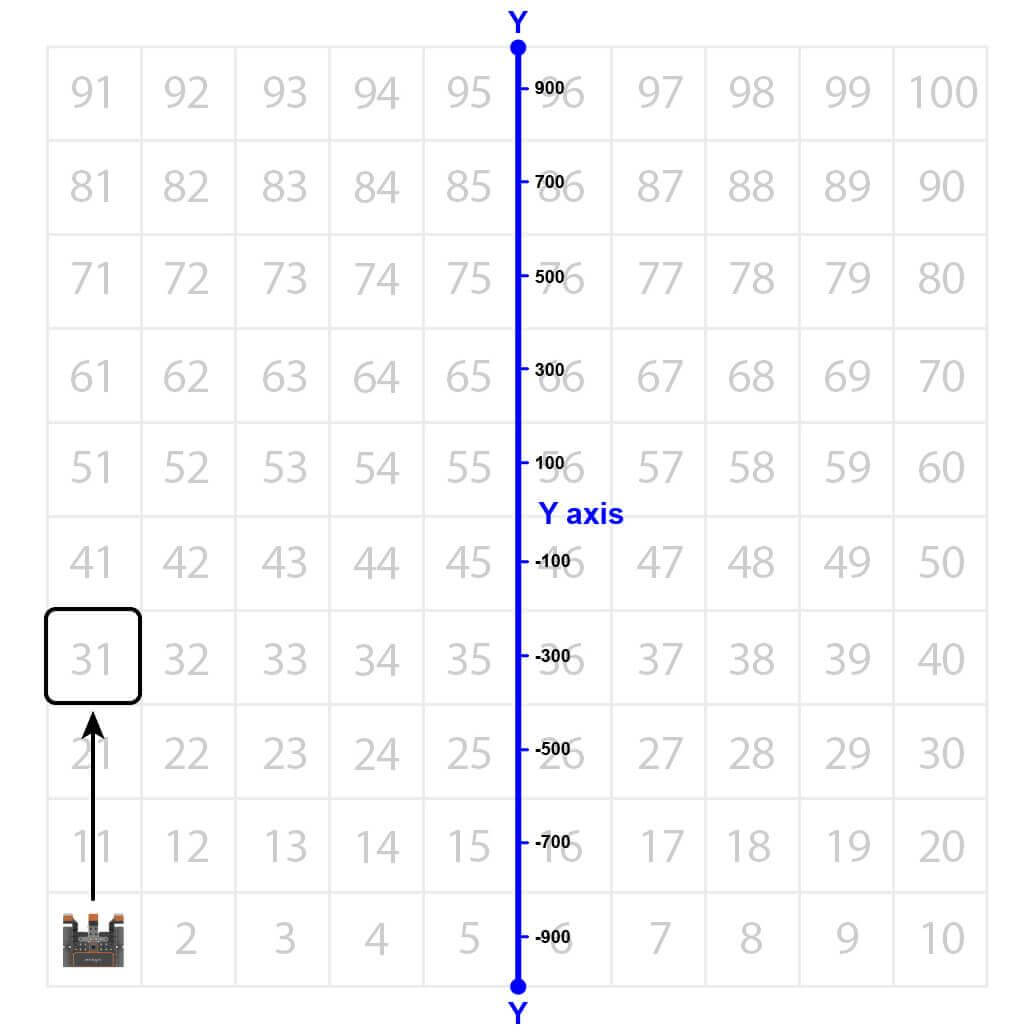
ध्यान दें कि वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर संख्या '31' पर जाने के लिए वाई अक्ष के साथ यात्रा करेगा।
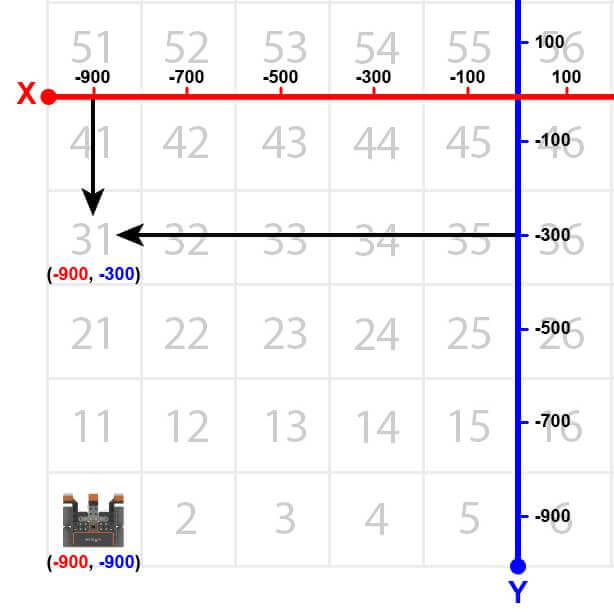
वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '31' के स्थान पर ड्राइव करेगा। हालाँकि, इससे पहले कि वीआर रोबोट उस नंबर तक पहुंच सके, वीआर रोबोट को यह बताना होगा कि वह नंबर कहां है। संख्या '31' के निर्देशांक (-900, -300) हैं।
-
[ड्राइव] नॉन-वेटिंग ब्लॉक को कार्यक्षेत्र में खींचें.
-
[ड्राइव] ब्लॉक के नीचे [प्रतीक्षा करें] ब्लॉक संलग्न करें।
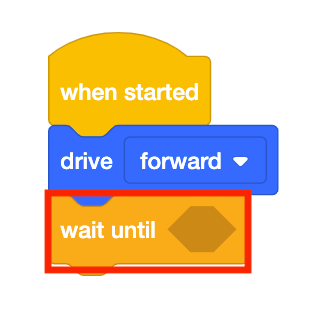
-
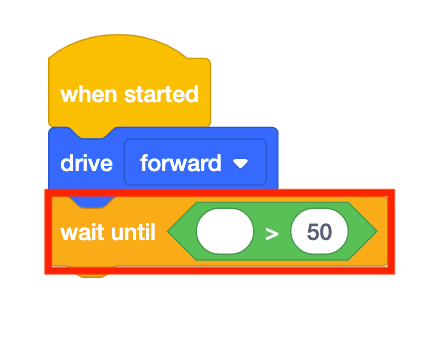
<Greater than> बूलियन रिपोर्टर ब्लॉक को [Wait until] ब्लॉक में खींचें.
-
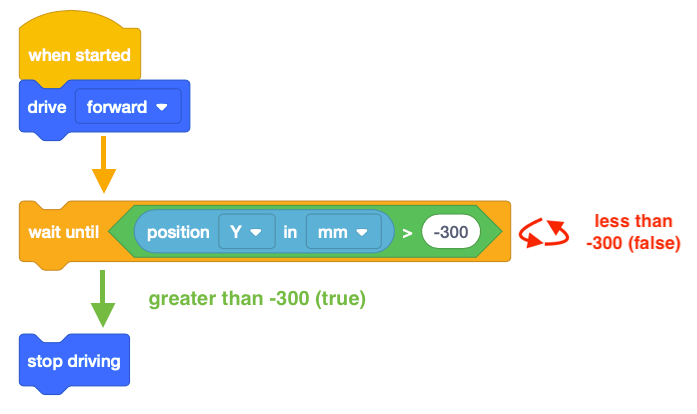
ध्यान दें कि <Less than> ब्लॉक के स्थान पर <Greater than> ब्लॉक का उपयोग किया गया है, क्योंकि VR रोबोट खेल के मैदान के नीचे से ऊपर की ओर आ रहा है। वीआर रोबोट -900 मिलीमीटर (मिमी) के वाई-मान से शुरू हो रहा है। जैसे-जैसे वीआर रोबोट आगे बढ़ता है, Y-मान बढ़ता जाता है।
-
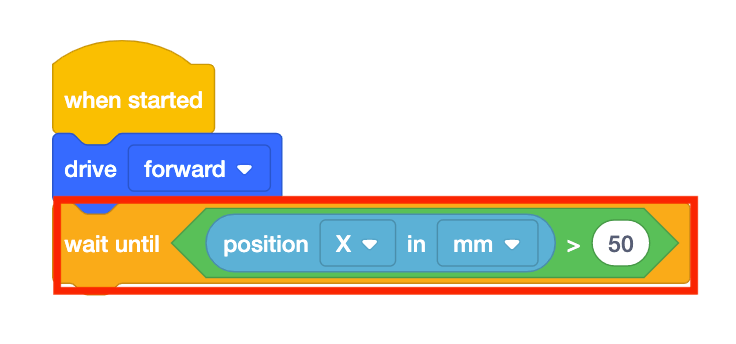
(रोबोट की स्थिति) ब्लॉक को <Greater than> ब्लॉक में खींचें।
-
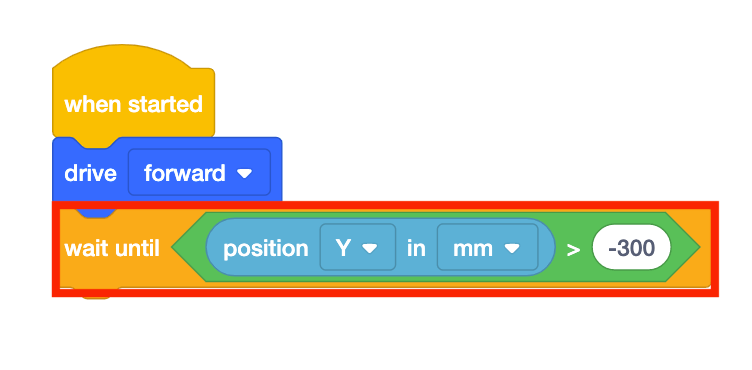
(रोबोट की स्थिति) ब्लॉक का पैरामीटर “Y” पर सेट करें और <Greater than> ब्लॉक का पैरामीटर -300 पर सेट करें।
-
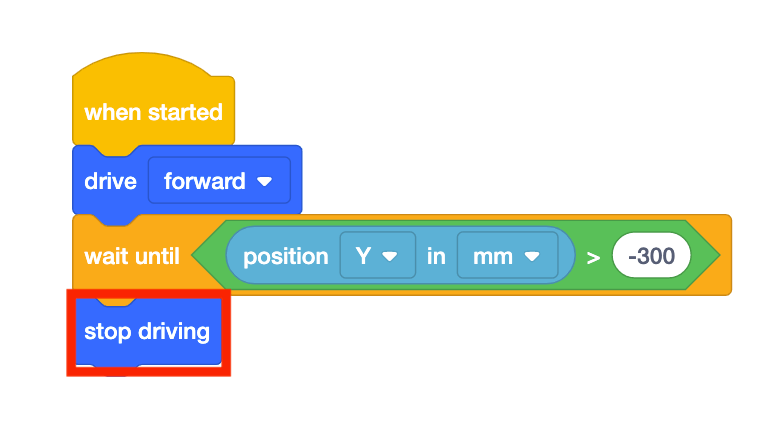
[ड्राइविंग रोकें] ब्लॉक को खींचें और उसे प्रोजेक्ट में जोड़ें.
- यदि नंबर ग्रिड मैप प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
-
नंबर ग्रिड मानचित्र खेल के मैदानपर नंबर '31' के लिए वी.आर. रोबोट ड्राइव देखें।

- इस परियोजना में, वीआर रोबोट नंबर ग्रिड मैप प्लेग्राउंडपर नंबर '31' तक ड्राइव करता है। चूंकि वीआर रोबोट के संख्या '31' तक पहुंचने पर Y-मान बढ़ रहा है, इसलिए परियोजना <Greater than> ब्लॉक का उपयोग करती है।
- वीआर रोबोट तब रुक जाएगा जब उसका वाई-मान उस निर्देशांक के वाई-मान से अधिक हो जाएगा जिस पर संकेतित संख्या स्थित है। चूंकि संख्या '31' का Y-मान -300 है, इसलिए Y-मान -300 से अधिक होने पर VR रोबोट गाड़ी चलाना बंद कर देगा।
स्विच ब्लॉक का उपयोग करना
इस पाठ में, आपने सीखा कि बूलियन शर्त के साथ VEXcode [Wait until] ब्लॉक का उपयोग कैसे करें, ताकि रोबोट को अगले व्यवहार पर जाने से पहले Y-अक्ष पर -300 से अधिक की स्थिति तक पहुंचने तक प्रतीक्षा करने का आदेश दिया जा सके।
नीचे दी गई छवि स्विच ब्लॉक के बगल में VEXcode ब्लॉक को दिखाती है जिसमें समान व्यवहार के लिए पायथन कमांड शामिल है।
 स्विच ब्लॉक के भीतर,while not location.position(Y, MM) > -300:पहला पायथन कमांड है जो यह जांचता है कि X-अक्ष के साथ रोबोट की स्थिति -300 से अधिक है या नहीं।
स्विच ब्लॉक के भीतर,while not location.position(Y, MM) > -300:पहला पायथन कमांड है जो यह जांचता है कि X-अक्ष के साथ रोबोट की स्थिति -300 से अधिक है या नहीं।
दूसरा इंडेंटेड कमांड,wait (5, MSEC),सशर्त लूप के निष्पादन को 5 मिलीसेकंड के लिए रोक देता है।
VEXcode VR में, wait कमांड हमेशा सशर्त लूप के साथ जोड़ा जाता है। wait कमांड का उद्देश्य यह सुनिश्चित करना है कि VEXcode VR प्लेटफॉर्म की वेब-आधारित प्रकृति के कारण, VEXcode VR परियोजना को अपेक्षित रूप से ठीक से चला सके। सशर्त लूप का उपयोग करते समय wait कमांड को कभी भी हटाया नहीं जाना चाहिए, अन्यथा आपका प्रोजेक्ट अपेक्षित रूप से नहीं चल पाएगा।
इस उदाहरण में, परियोजना यह जांचती है कि रोबोट की स्थिति प्रत्येक 5 MSEC पर -300 के Y मान से अधिक है या नहीं। कोड की यह पंक्ति कोड की पहली पंक्ति के नीचे इंडेंट की गई है, क्योंकि यह कमांड वह व्यवहार है जो तब तक दोहराया जाएगा जब तक कि शर्त (-300 से अधिक का Y निर्देशांक मान) पूरी नहीं हो जाती।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।