
পাঠ ৩: '৩১' নম্বরে গাড়ি চালাও
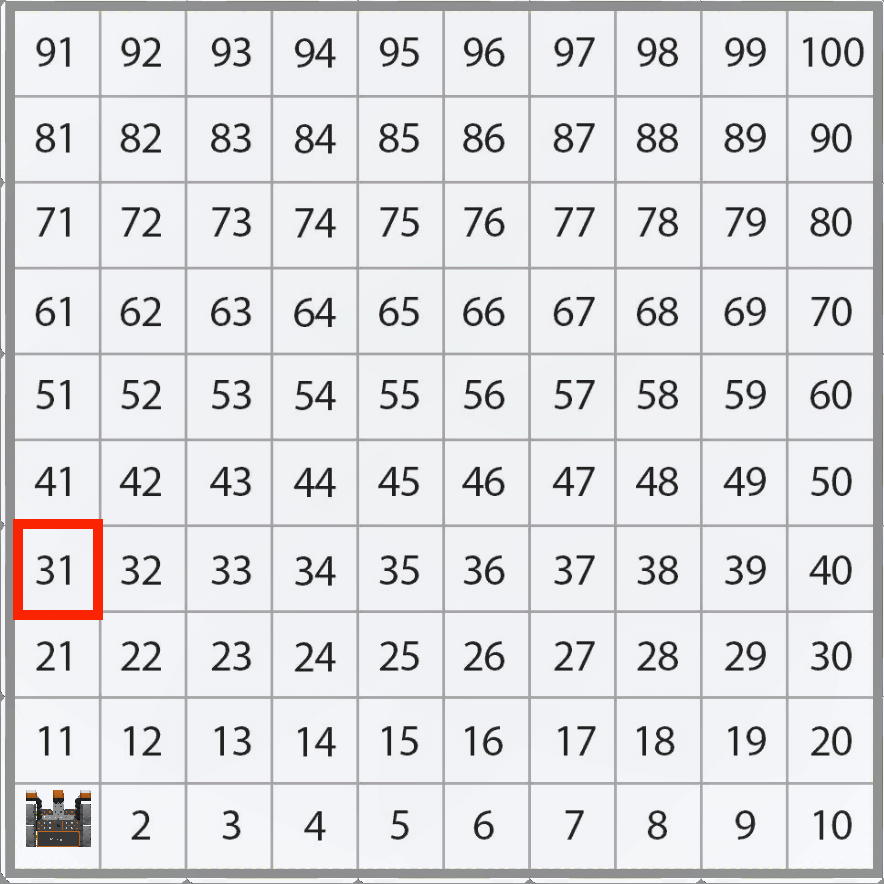
এই পাঠে, ভিআর রোবটটি '31' নম্বরে গাড়ি চালাবে এবং তারপর নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '1' নম্বরে ফিরে যাবে!
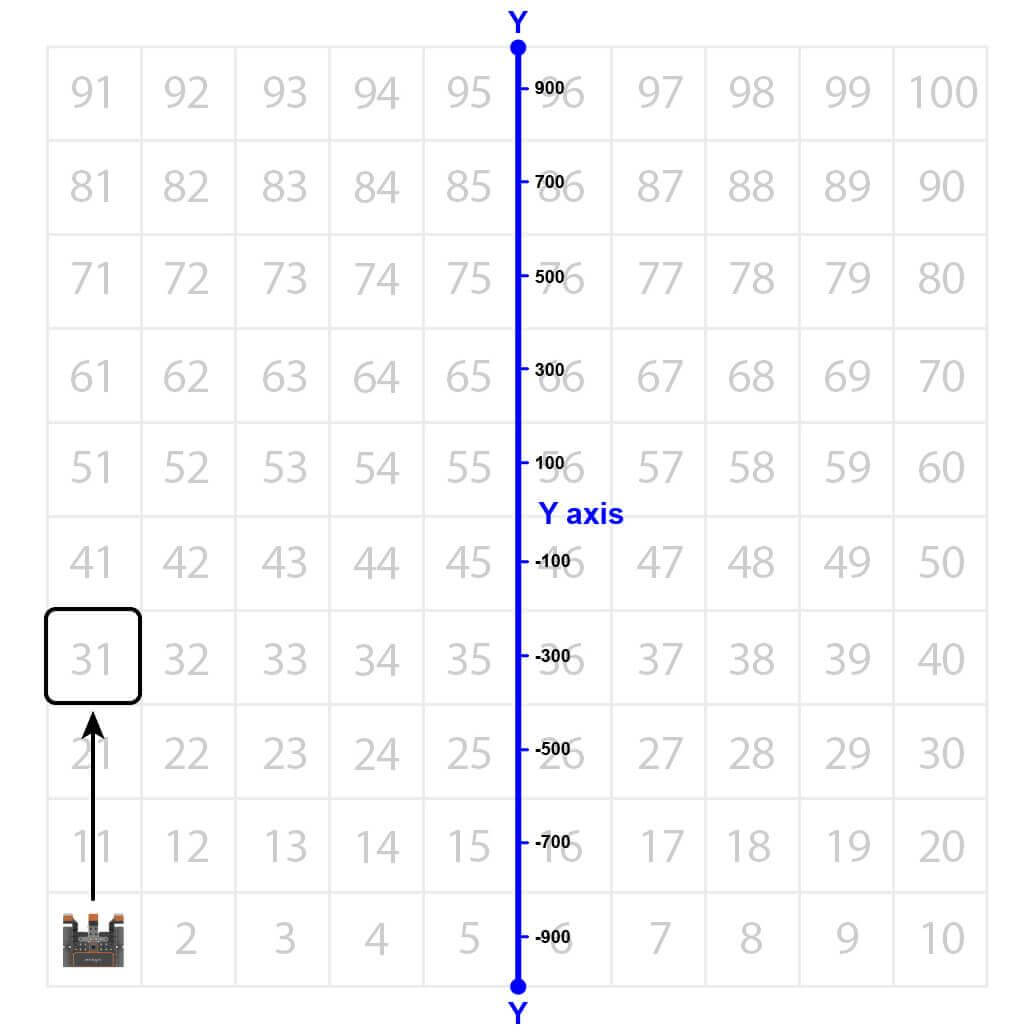
লক্ষ্য করুন যে VR রোবটটি Y অক্ষ বরাবর ভ্রমণ করবে নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '31' নম্বরে যেতে।
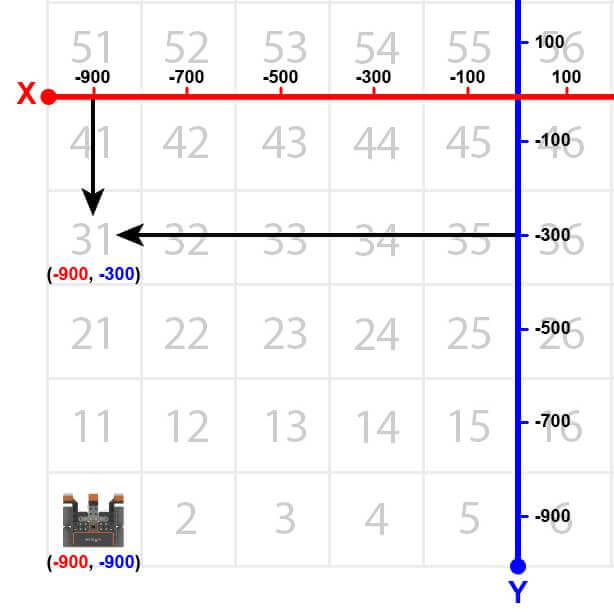
ভিআর রোবটটি নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড-এ '31' নম্বরের অবস্থানে চলে যাবে। যাইহোক, ভিআর রোবট সেই নম্বরে নেভিগেট করার আগে, ভিআর রোবটকে সেই নম্বরটির অবস্থান কোথায় তা জানাতে হবে। '31' সংখ্যার স্থানাঙ্ক হল (-900, -300)।
-
[ড্রাইভ] নন-ওয়েটিং ব্লকটিকে কর্মক্ষেত্রে টেনে আনুন।
-
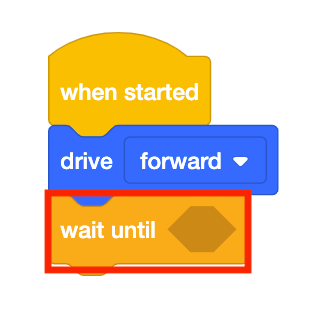
[ড্রাইভ] ব্লকের নিচে একটি [অপেক্ষা করুন] ব্লক সংযুক্ত করুন।
-
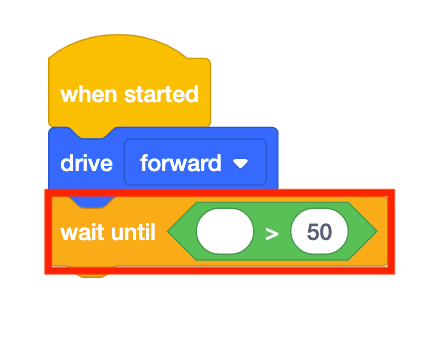
<Greater than> বুলিয়ান রিপোর্টার ব্লকটি [অপেক্ষা করুন] ব্লকে টেনে আনুন।
-
মনে রাখবেন যে <Less than> ব্লকের পরিবর্তে <Greater than> ব্লক ব্যবহার করা হয়েছে কারণ VR রোবট খেলার মাঠের নিচ থেকে ড্রাইভ করছে। VR রোবট -900 মিলিমিটার (মিমি) এর Y-মানে শুরু হচ্ছে। VR রোবট এগিয়ে যাওয়ার সাথে সাথে Y-মান বৃদ্ধি পায়।
-
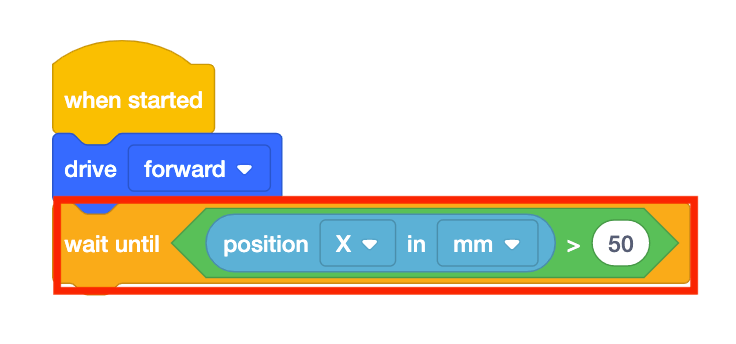
(রোবটের অবস্থান) ব্লকটি <Greater than> ব্লকে টেনে আনুন।
-
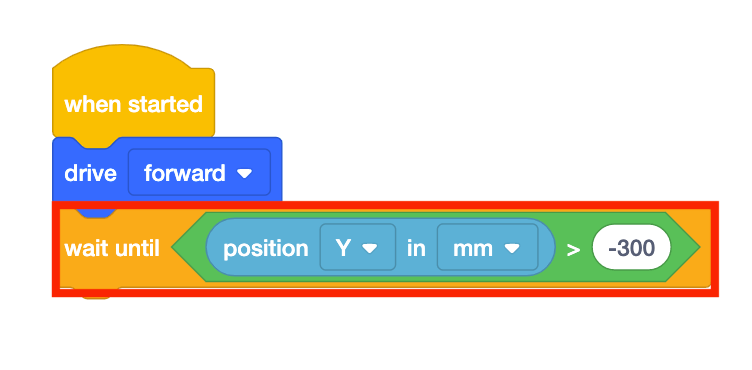
(রোবটের অবস্থান) ব্লকের প্যারামিটারটি "Y" এবং <Greater than> ব্লকের পরামিতি -300 এ সেট করুন।
-
একটি [ড্রাইভিং বন্ধ করুন] ব্লকে টেনে আনুন এবং এটিকে প্রকল্পে যোগ করুন।
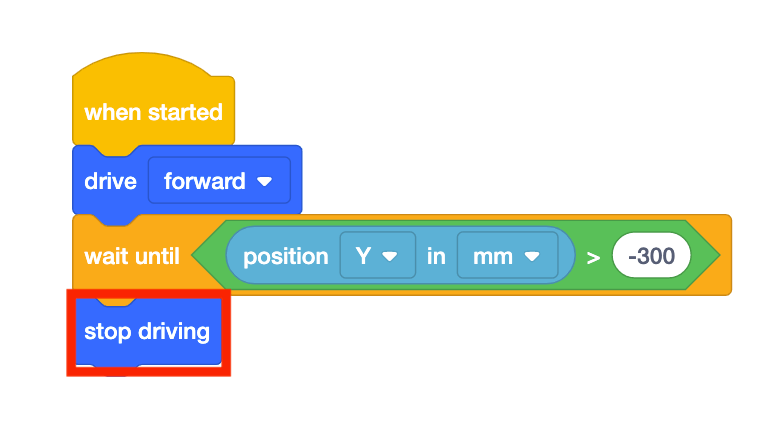
- নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ড'31' নম্বরে ভিআর রোবট ড্রাইভ দেখুন।

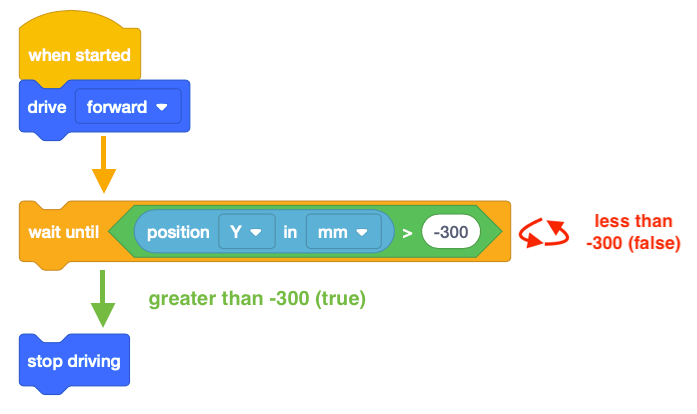
- এই প্রকল্পে, ভিআর রোবট নম্বর গ্রিড ম্যাপ প্লেগ্রাউন্ডএ '31' নম্বরে ড্রাইভ করে। যেহেতু VR রোবট '31' নম্বরে ড্রাইভ করার সাথে সাথে Y-মান বৃদ্ধি পাচ্ছে, প্রকল্পটি একটি <Greater than> ব্লক ব্যবহার করে।
- VR রোবটটি যখন নির্দেশিত সংখ্যাটি চালু আছে তার Y-মান স্থানাঙ্কের Y-মানের থেকে বেশি হয়ে গেলে থামবে৷ যেহেতু '31' নম্বরের Y-মান -300, তাই Y-মান -300-এর বেশি হলে VR রোবট গাড়ি চালানো বন্ধ করে দেবে।
সুইচ ব্লক ব্যবহার করা
এই পাঠে, আপনি শিখেছেন কিভাবে VEXcode [Wait until] ব্লকটি বুলিয়ান কন্ডিশন সহ ব্যবহার করতে হয় যাতে রোবটটি পরবর্তী আচরণে যাওয়ার আগে Y-অক্ষে -300 এর বেশি অবস্থানে পৌঁছানো পর্যন্ত অপেক্ষা করতে পারে।
নিচের ছবিতে একই আচরণের জন্য Python কমান্ড সম্বলিত Switch ব্লকের পাশে VEXcode ব্লকটি দেখানো হয়েছে।
 সুইচ ব্লকের মধ্যে,while not location.position(Y, MM) > -300:হল প্রথম পাইথন কমান্ড যা পরীক্ষা করে যে X-অক্ষ বরাবর রোবটের অবস্থান -300 এর বেশি কিনা।
সুইচ ব্লকের মধ্যে,while not location.position(Y, MM) > -300:হল প্রথম পাইথন কমান্ড যা পরীক্ষা করে যে X-অক্ষ বরাবর রোবটের অবস্থান -300 এর বেশি কিনা।
দ্বিতীয় ইন্ডেন্টেড কমান্ড,wait (5, MSEC),5 মিলিসেকেন্ডের জন্য কন্ডিশনাল লুপের এক্সিকিউশন থামায়।
VEXcode VR-তে, শর্তসাপেক্ষ লুপের সাথে সর্বদা একটি wait কমান্ড যোগ করা হয়। wait কমান্ডের উদ্দেশ্য হল VEXcode VR যাতে প্রকল্পটি যথাযথভাবে পরিচালনা করতে পারে তা নিশ্চিত করা, কারণ VEXcode VR প্ল্যাটফর্মটি ওয়েব-ভিত্তিক। কন্ডিশনাল লুপ ব্যবহার করার সময় wait কমান্ডটি কখনই মুছে ফেলা উচিত নয়, অন্যথায় আপনার প্রকল্পটি ইচ্ছাকৃতভাবে নাও চলতে পারে।
এই উদাহরণে, প্রকল্পটি পরীক্ষা করে যে রোবটের অবস্থান প্রতি ৫ MSEC-তে -৩০০ এর Y মানের চেয়ে বেশি কিনা। এই কোডের লাইনটি কোডের প্রথম লাইনের নীচে ইন্ডেন্ট করা হয়েছে কারণ এই কমান্ডটি এমন আচরণ যা শর্ত (-300 এর বেশি Y স্থানাঙ্ক মান) পূরণ না হওয়া পর্যন্ত পুনরাবৃত্তি হবে।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।