
الدرس 3: ضبط المسافات
في الدرس السابق، استخدمت مستشعر المسافة ومشغلات المقارنة لروبوت الواقع الافتراضي للقيادة من البداية إلى الرقم "1" على ملعب المتاهة الجدارية. في هذا الدرس، ستتعلم كيفية مراقبة القيم من أجهزة الاستشعار في لوحة المعلومات، والحصول على محرك روبوت الواقع الافتراضي من البداية إلى الحرف "B" على ملعب المتاهة الجدارية.

مخرجات التعلم
- حدد أنه يمكن استخدام لوحة المعلومات لمراقبة البيانات من مستشعر المسافة.
- حدد كيفية تغيير المعلمات في مشروع لاستخدام بيانات مستشعر المسافة للتنقل في روبوت الواقع الافتراضي عبر ملعب المتاهة الجدارية.
القيادة إلى الحرف "ب"
هناك عدة طرق للانتقال إلى الحرف "B" في متاهة الجدار. لنبدأ، دعونا نلقي نظرة على المسار الأكثر مباشرة إلى
الحرف "B". 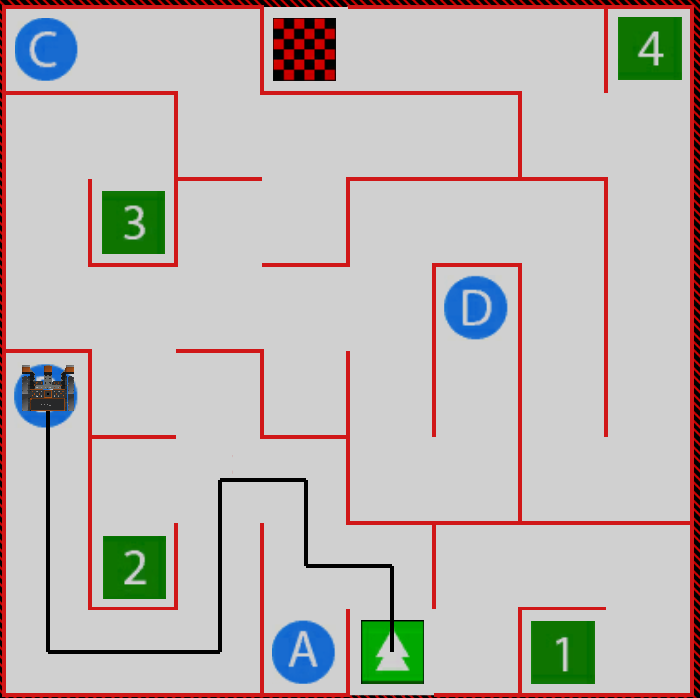
بدء مشروع جديد
- ابدأ مشروعًا نصيًا جديدًا وحدد Wall Maze Playground عند مطالبتك بذلك.
- اسم المشروع Unit5Lesson3.

القيادة إلى الحرف "ب"
-
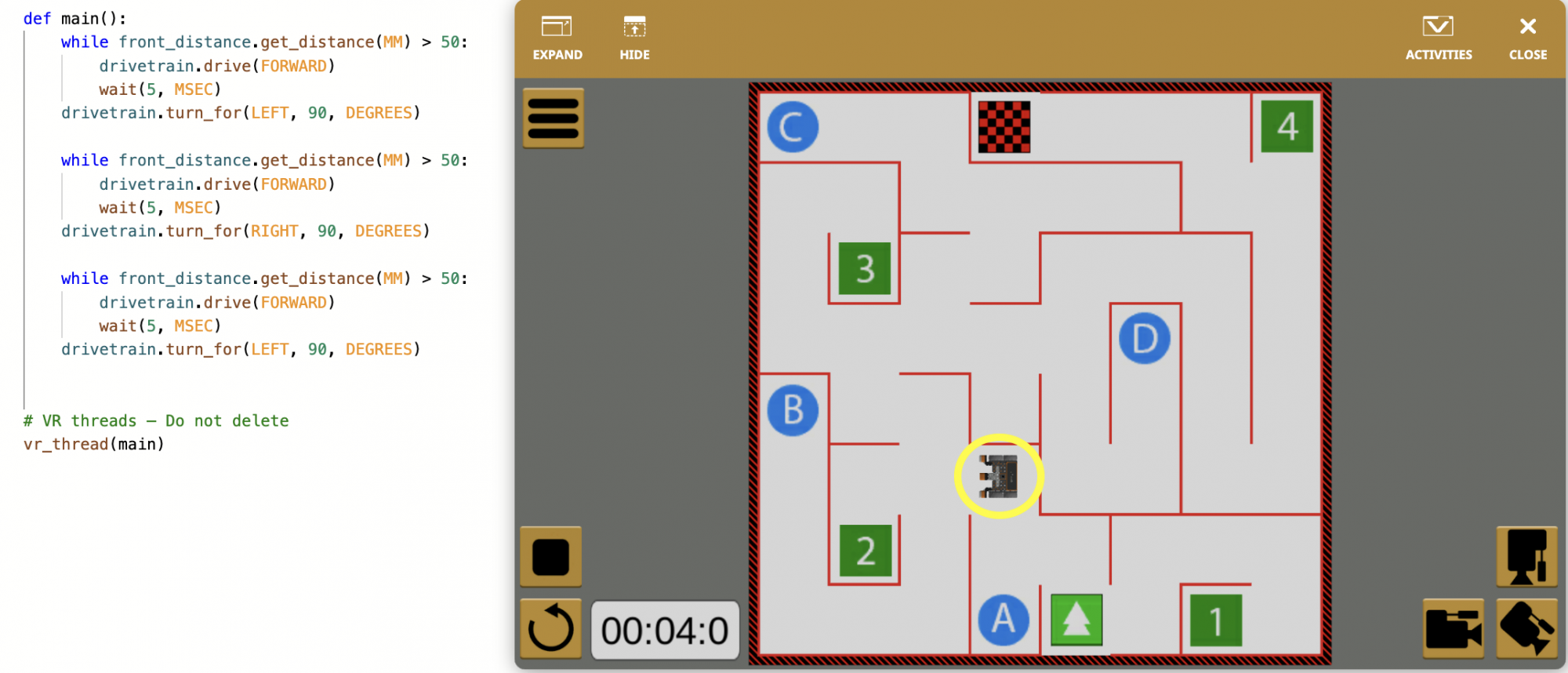
بادئ ذي بدء، فإن الحركات القليلة الأولى لروبوت الواقع الافتراضي لدينا تشبه ما فعلناه في الدرس السابق. قم ببناء المشروع التالي للبدء في المسار:
def main (): while front_distance.get_distance (MM) > 50: drivetrain.drive ( للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for (لليسار، 90، درجة) while front_distance.get_distance (MM) > 50: drivetrain.drive (للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for (لليمين، 90، درجة) while front_distance.get_distance (MM) > 50: drivetrain.drive (للأمام) انتظر(5، مللي ثانية) drivetrain.turn_for(لليسار، 90، درجة) - افتح نافذة الملعب إذا لم تكن مفتوحة بالفعل. تأكد من فتح ملعب متاهة الحائط ، وقم بتشغيل المشروع.
- لاحظ أين يتوقف روبوت الواقع الافتراضي في هذه المرحلة من المشروع. إنه يواجه اليسار، الاتجاه الصحيح
لمواصلة القيادة إلى الحرف "B".
معرفة موقع الانعطاف المرغوب
يواجه روبوت الواقع الافتراضي الآن الاتجاه الصحيح للمتابعة إلى الجزء التالي من المسار. ومع ذلك، إذا
استخدمنا نفس قيمة المسافة من مستشعر المسافة للمتابعة، كما فعلنا في الدرس السابق، فإن روبوت الواقع
الافتراضي سيتبع هذا المسار. 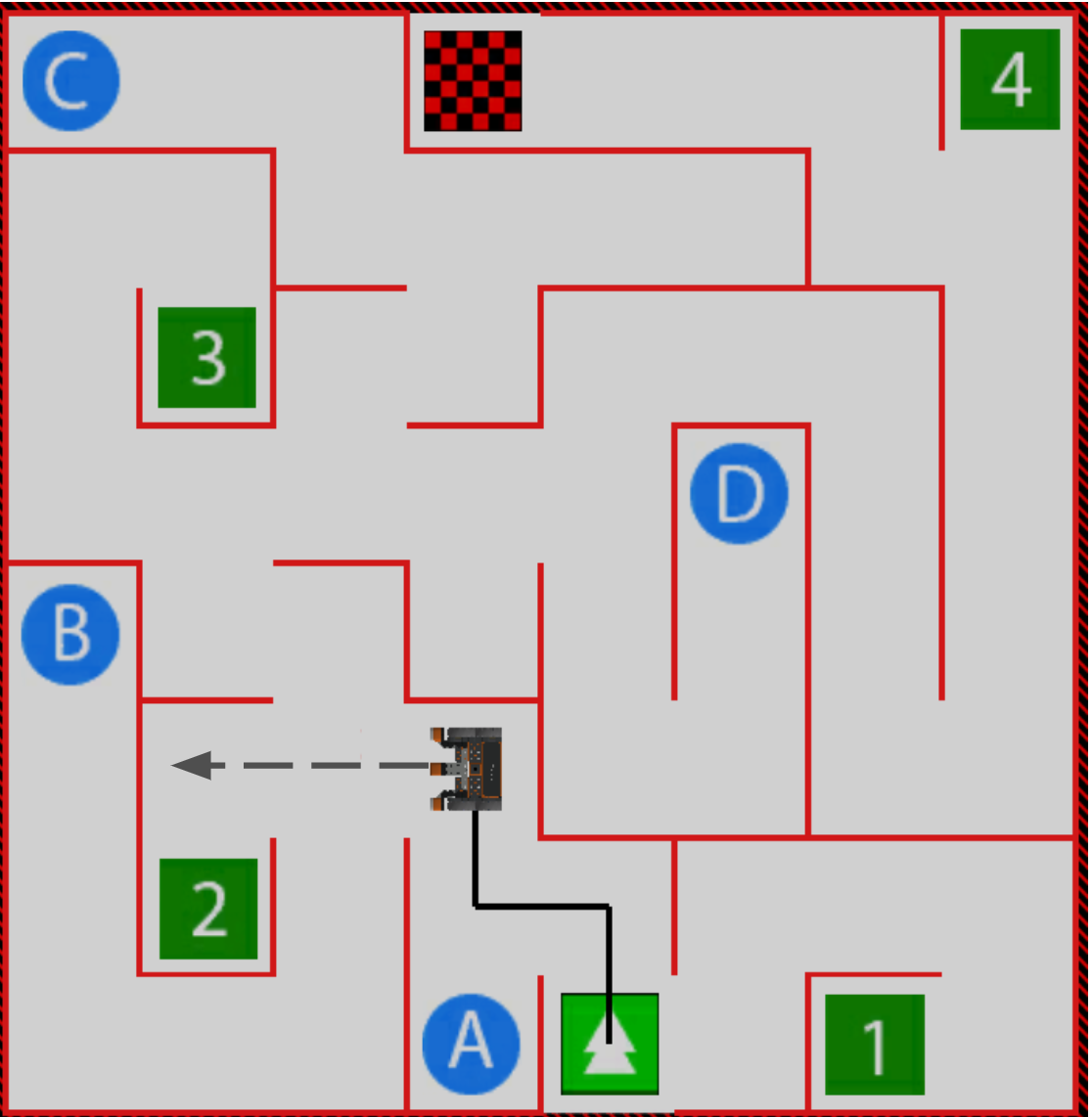
يمكننا عكس واستخدام أوامر مجموعة نقل الحركة، كما فعلنا في الوحدة السابقة مع مستشعر المصد، للوصول إلى
نقطة التحول المطلوبة. يمكن أن يبدو هذا على النحو التالي: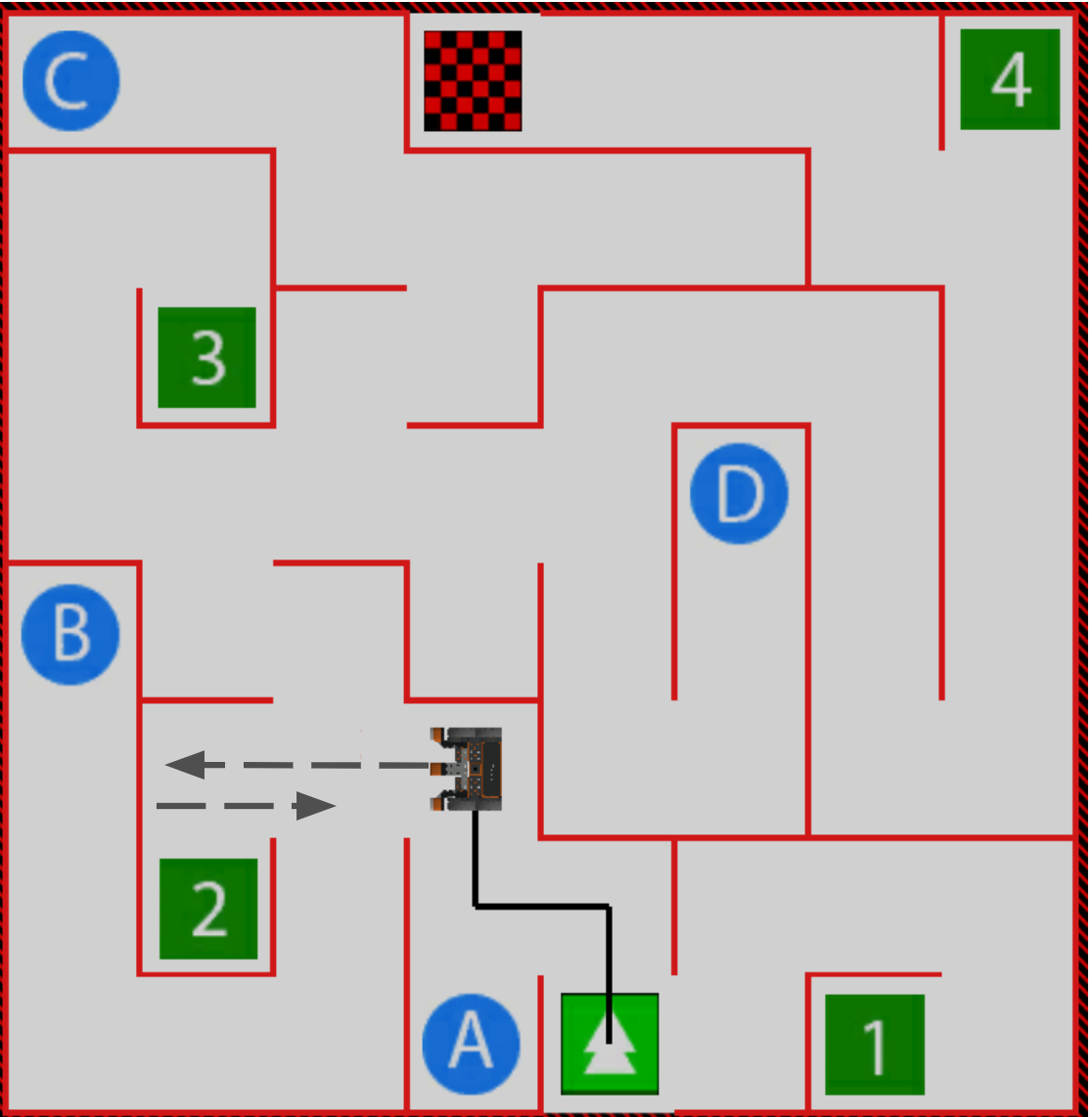
ومع ذلك، يمكن استخدام مستشعر المسافة للسماح لروبوت الواقع الافتراضي بالانعطاف على أي مسافة بعيدًا عن الحائط. في هذا المنعطف، يكون روبوت الواقع الافتراضي بعيدًا عن الحائط أكثر من المنعطفات الأخرى. يمكننا ضبط قيمة المسافة في مشغل المقارنة، لتمكين روبوت الواقع الافتراضي من الدوران على مسافة أبعد من الجدار، لجعل مشروعنا، ومسار روبوت الواقع الافتراضي، أكثر كفاءة.
قم باختيار الزر التالي لمواصلة بقية هذا الدرس.