
Leçon 3 : Ajustement des distances
Dans la leçon précédente, vous avez utilisé le capteur de distance et les opérateurs de comparaison pour le robot VR pour conduire du début au numéro « 1 » sur le terrain de jeu du labyrinthe mural. Dans cette leçon, vous apprendrez à surveiller les valeurs des capteurs du tableau de bord et à faire conduire le robot VR du début à la lettre « B » sur le terrain de jeu du labyrinthe mural.

Résultats d'apprentissage
- Identifiez que le tableau de bord peut être utilisé pour surveiller les données du capteur de distance.
- Identifier comment modifier les paramètres dans un projet pour utiliser les données du capteur de distance pour naviguer dans le robot VR à travers le terrain de jeu du labyrinthe mural.
Conduire jusqu'à la lettre « B »
Il existe plusieurs façons de naviguer jusqu'à la lettre « B » dans le labyrinthe mural. Pour commencer, examinons quel serait le chemin le plus direct vers la lettre « B ». 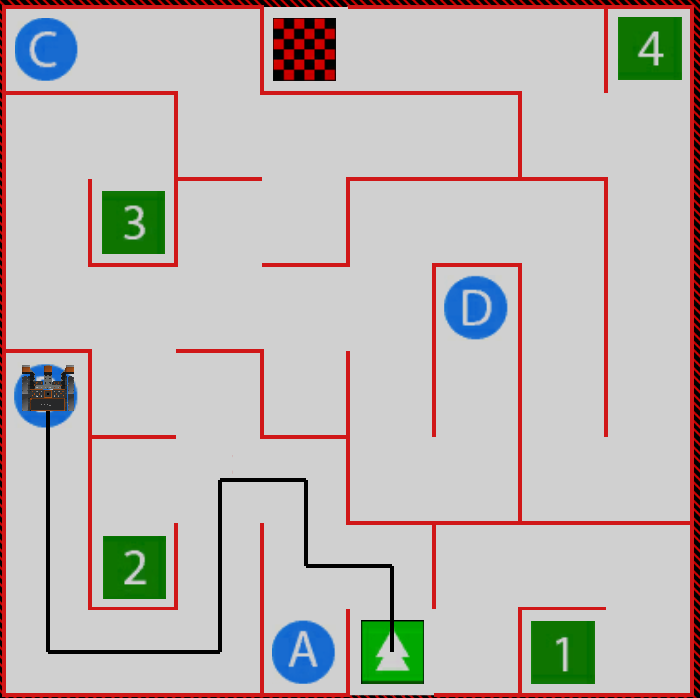
Démarrer un nouveau projet
- Lancez un nouveau projet de texte et sélectionnez le terrain de jeu Wall Maze lorsque vous y êtes invité.

- Nommez le projet Unit5Lesson3.

Conduisez jusqu'à la lettre « B »
-
Pour commencer, les premiers mouvements de notre robot VR sont similaires à ce que nous avons fait dans la leçon précédente. Construisez le projet suivant pour commencer sur le chemin :
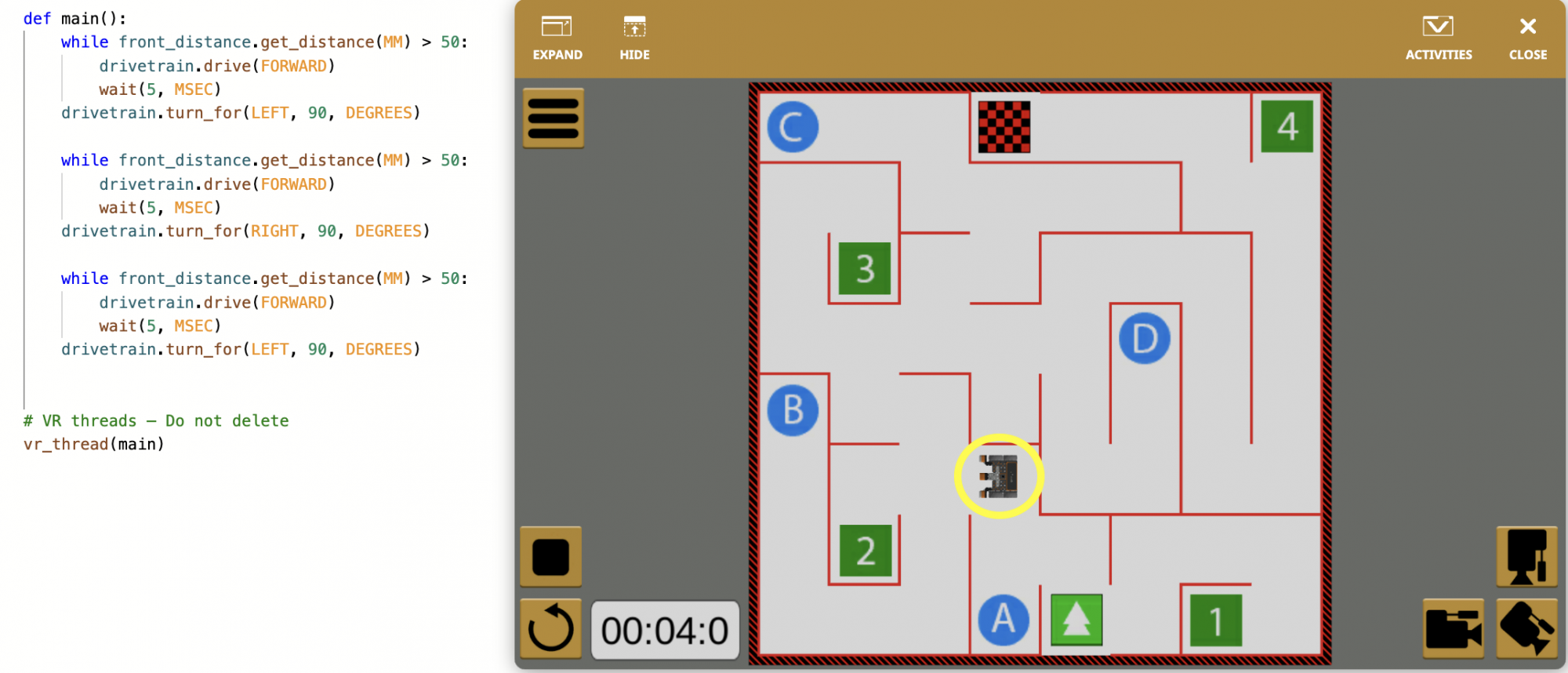
def main() : while front_distance.get_distance(MM) > 50 : drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGRÉS) while front_distance.get_distance (MM) > 50 : drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGRÉS) while front_distance.get_distance (MM) > 50 : drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGRÉS) - Ouvrez la fenêtre Playground si elle n'est pas déjà ouverte. Assurez-vous que le terrain de jeu Wall Maze s'ouvre et exécutez le projet.
- Remarquez où le robot VR s'arrête à ce stade du projet. Il est tourné vers la gauche, la bonne direction pour continuer à conduire à la lettre « B ».
Déterminer l'emplacement de tournage souhaité
Le robot VR fait maintenant face à la bonne direction pour continuer vers la partie suivante du chemin. Cependant, si nous utilisions la même valeur de distance du capteur de distance pour continuer, comme nous l'avons fait dans la leçon précédente, le robot VR suivrait ce chemin. 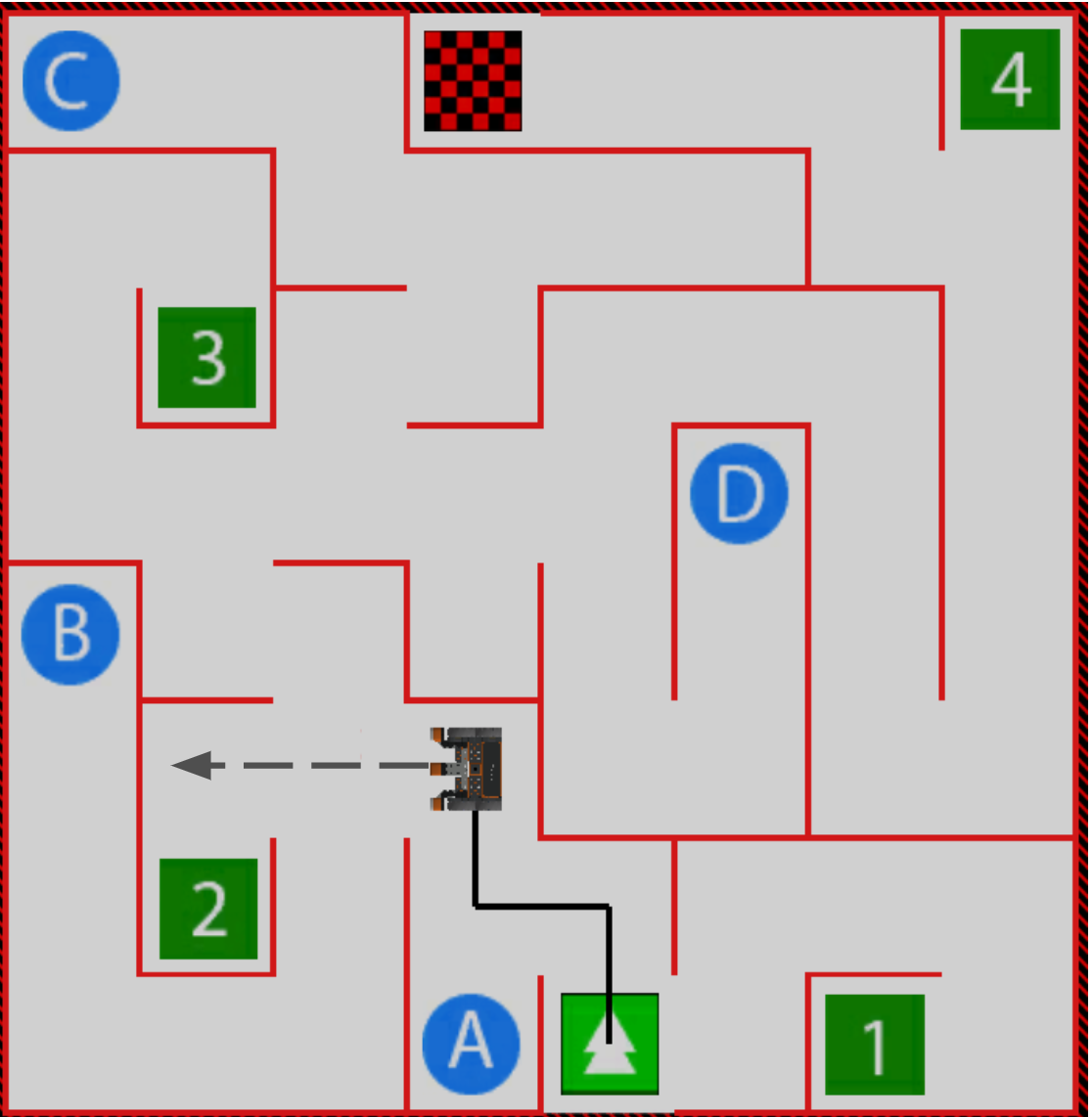
Nous pouvions inverser et utiliser les commandes du groupe motopropulseur, comme nous l'avons fait dans l'unité précédente avec le capteur de pare-chocs, pour atteindre le point de virage souhaité. Cela pourrait ressembler à ceci :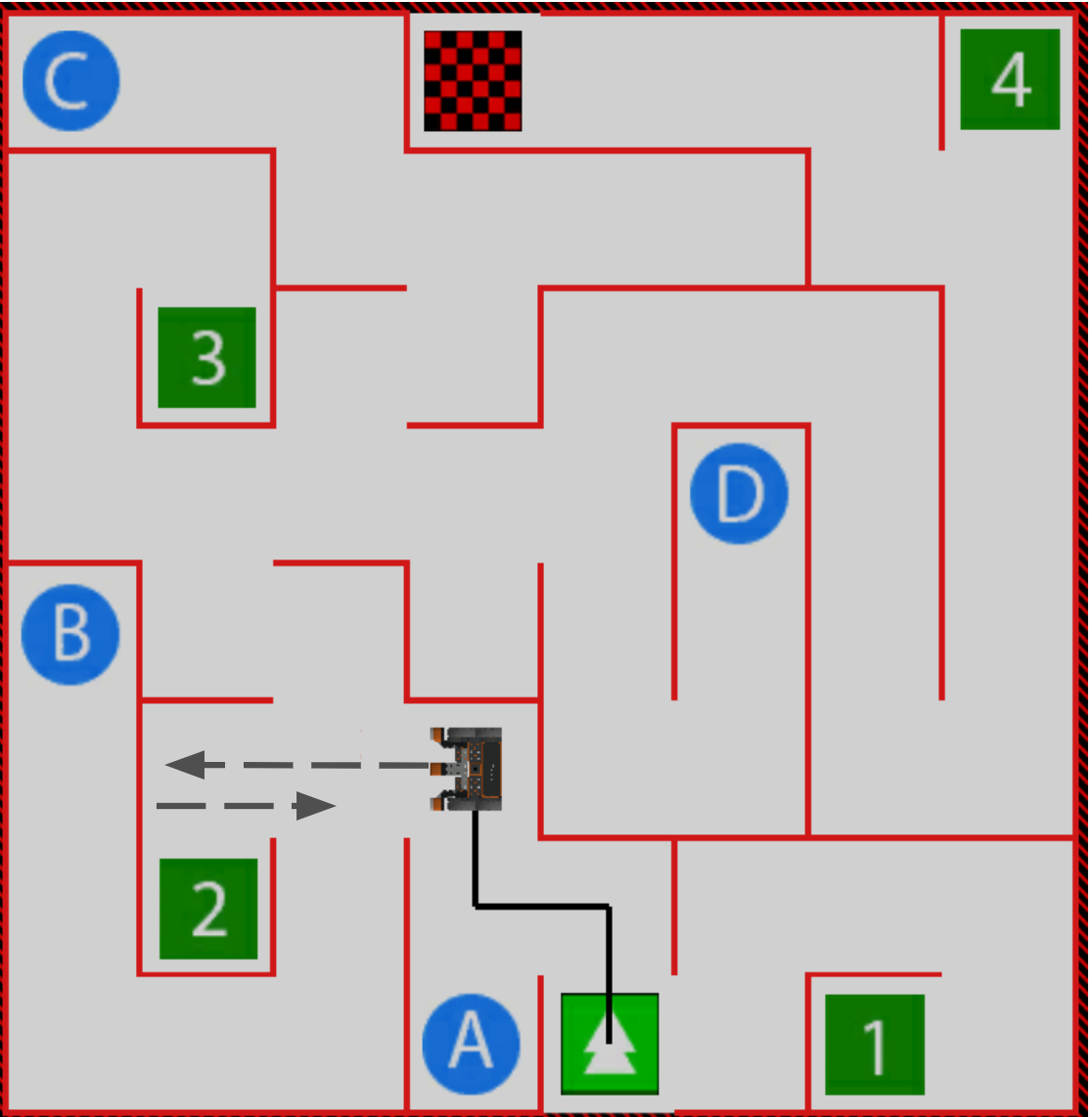
Cependant, le capteur de distance peut être utilisé pour permettre au robot VR de tourner à n'importe quelle distance d'un mur. À ce virage, le robot VR est plus éloigné du mur que les autres virages. Nous pouvons ajuster la valeur de la distance dans l'opérateur de comparaison, pour permettre au robot VR de tourner à une plus grande distance du mur, pour rendre notre projet et le chemin du robot VR plus efficaces.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.