
수업 3: 거리 조정
이전 수업에서는 거리 센서와 비교 연산자를 사용하여 VR 로봇이 Wall Maze Playground의 시작 지점에서 숫자 '1'까지 주행하도록 했습니다. 이 수업에서는 대시보드의 센서 값을 모니터링하는 방법과 VR 로봇이 Wall Maze Playground의 시작 지점에서 'B' 문자까지 주행하는 방법을 알아봅니다.

학습 성과
- 대시보드를 사용하여 거리 센서의 데이터를 모니터링할 수 있는지 확인합니다.
- VR 로봇이 벽면 미로 놀이터를 통과하도록 거리 센서 데이터를 사용하여 프로젝트에서 매개변수를 변경하는 방법을 식별합니다.
'B' 문자로 운전
벽 미로에서 'B' 문자로 이동하는 방법에는 여러 가지가 있습니다. 우선, 'B'라는 글자로 가는 가장 직접적인 경로가 무엇인지 살펴보겠습니다. 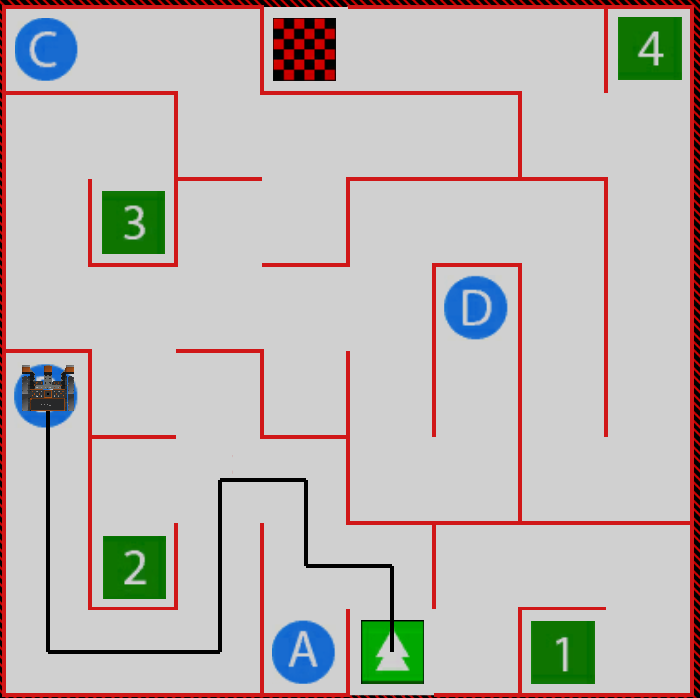
새로운 프로젝트 시작
- 새로운 텍스트 프로젝트를 시작하고 메시지가 표시되면 Wall Maze Playground선택합니다.
- 프로젝트 이름을 Unit5Lesson3로 지정하세요.

문자 'B'로 운전하세요
-
우선, VR 로봇의 처음 몇 가지 동작은 이전 수업에서 했던 것과 비슷합니다. 다음 프로젝트를 빌드하여 경로를 시작하세요.
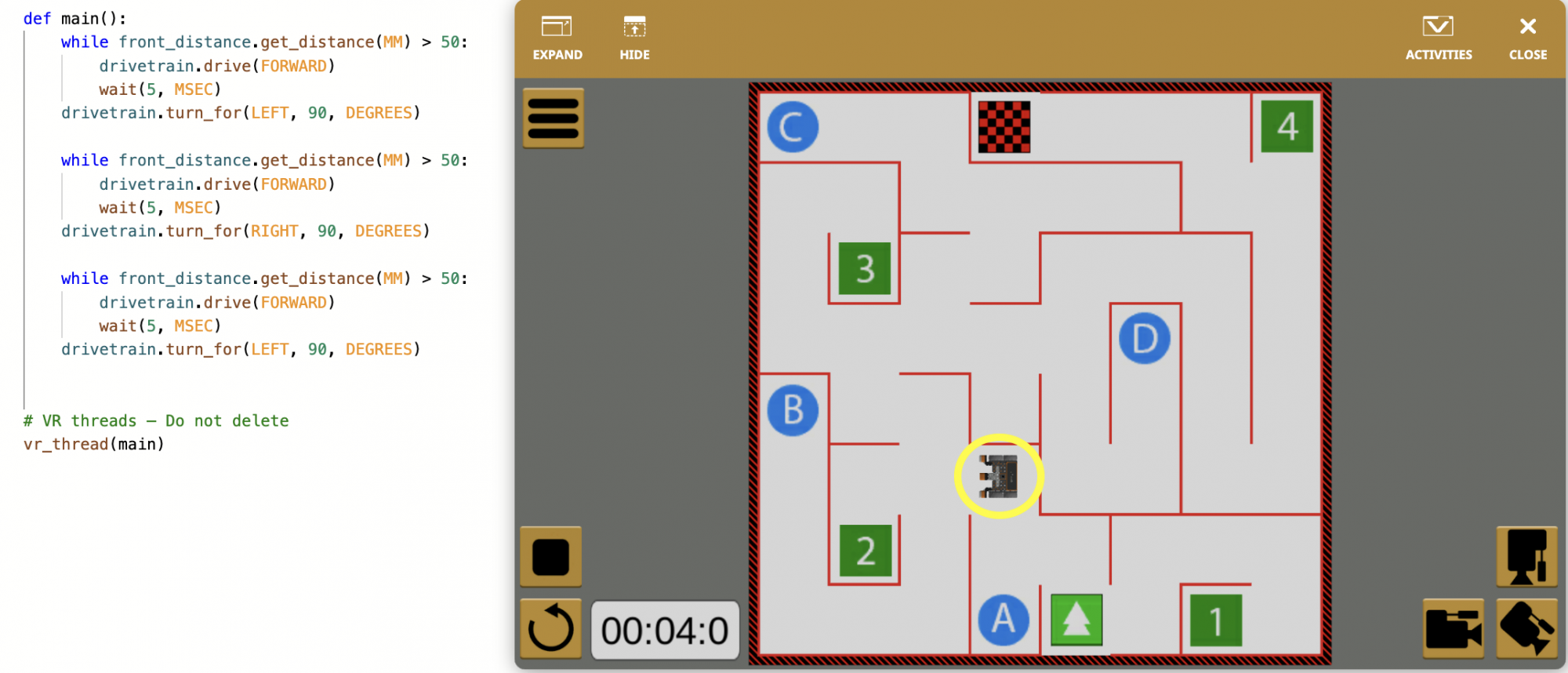
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive(전진) wait(5, MSEC) drivetrain.turn_for(좌회전, 90, 도) while front_distance.get_distance(MM) > 50: drivetrain.drive(전진) wait(5, MSEC) drivetrain.turn_for(우회전, 90, 도) while front_distance.get_distance(MM) > 50: drivetrain.drive(전진) wait(5, MSEC) drivetrain.turn_for(좌회전, 90, 도) - 아직 열려 있지 않으면 놀이터 창을 엽니다. Wall Maze Playground이 열리는지 확인하고 프로젝트를 실행하세요.
- 이 프로젝트에서 VR 로봇이 어디에서 멈췄는지 주목하세요. 'B' 문자로 계속 운전하려면 왼쪽을 향하고 있어야 합니다.
원하는 회전 위치 파악
VR 로봇은 이제 경로의 다음 부분으로 계속 이동할 수 있는 올바른 방향을 향하고 있습니다. 하지만 이전 레슨에서 했던 것처럼 거리 센서에서 나온 동일한 거리 값을 사용하여 계속 진행하면 VR 로봇은 이 경로를 따라갈 것입니다. 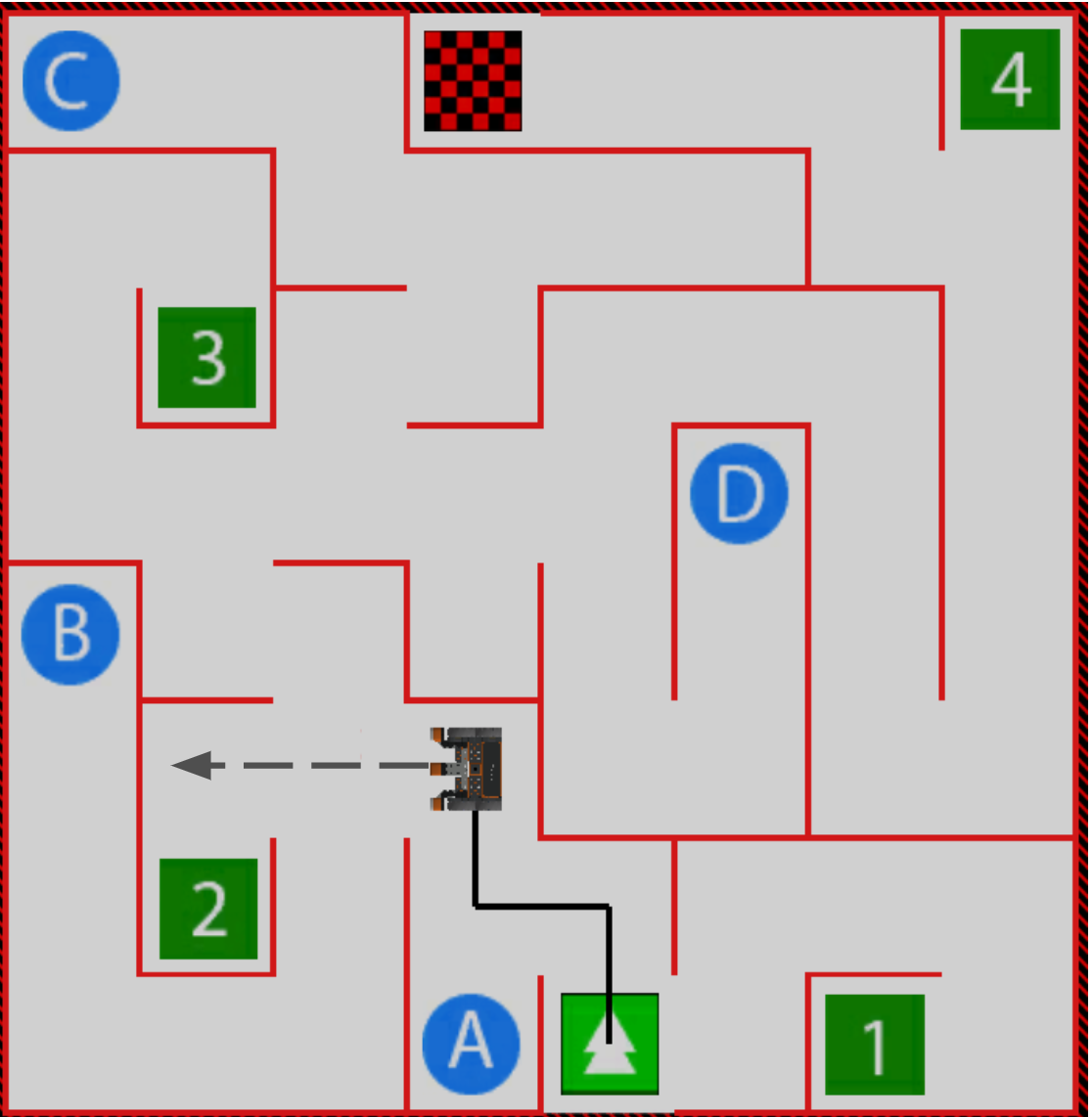
이전 단원에서 범퍼 센서를 사용하여 수행한 것과 마찬가지로 드라이브트레인 명령을 후진하여 사용하여 원하는 회전 지점에 도달할 수 있습니다. 이는 다음과 같습니다.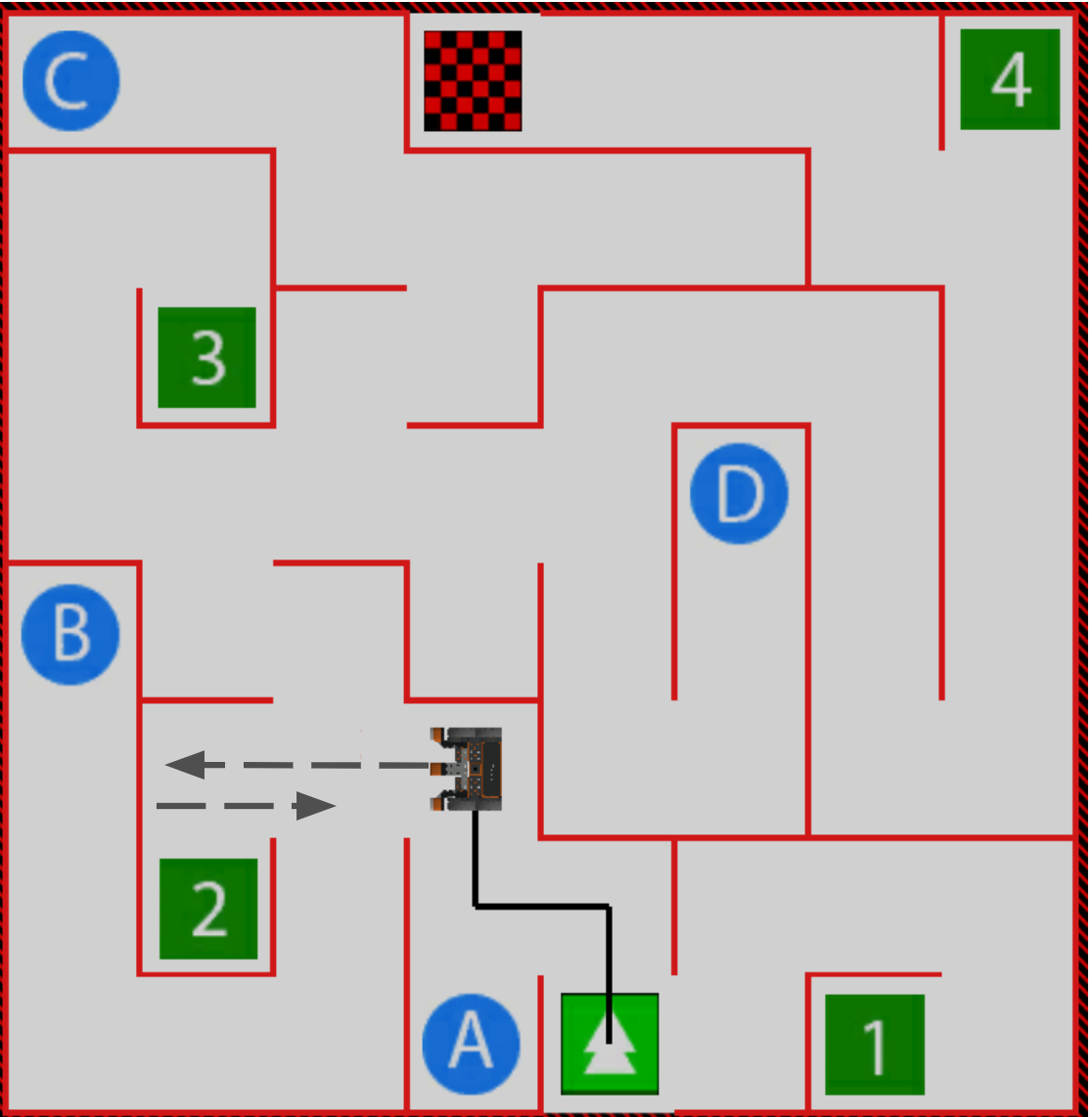
하지만 거리 센서를 사용하면 VR 로봇이 벽으로부터 , 떨어진 거리에서 회전할 수 있습니다. 이 턴에서 VR 로봇은 다른 턴보다 벽으로부터 더 멀리 떨어져 있습니다. 비교 연산자에서 거리 값을 조정하여 VR 로봇이 벽으로부터 더 먼 거리에서 회전할 수 있도록 함으로써 프로젝트와 VR 로봇의 경로를 더욱 효율적으로 만들 수 있습니다.
이 강의의 나머지 부분을 계속하려면 다음 버튼을 선택하세요.