
บทเรียนที่ 3: การปรับระยะทาง
ในบทเรียนก่อนหน้านี้คุณใช้เซ็นเซอร์ระยะทางและตัวดำเนินการเปรียบเทียบสำหรับหุ่นยนต์ VR เพื่อขับจากจุดเริ่มต้นไปยังหมายเลข ‘1’ บน Wall MazePlayground ในบทเรียนนี้คุณจะได้เรียนรู้วิธีตรวจสอบค่าจากเซ็นเซอร์ในแดชบอร์ดและให้หุ่นยนต์ VR ขับจากจุดเริ่มต้นไปยังตัวอักษร ‘B’ บน Wall MazePlayground

ผลการเรียนรู้
- ระบุว่าแดชบอร์ดสามารถใช้เพื่อตรวจสอบข้อมูลจากเซ็นเซอร์ระยะทางได้
- ระบุวิธีการเปลี่ยนพารามิเตอร์ในโครงการเพื่อใช้ข้อมูลเซ็นเซอร์ระยะทางเพื่อนำทางหุ่นยนต์ VR ผ่าน Wall Maze Playground
กำลังขับรถไปยังตัวอักษร 'B'
มีหลายวิธีในการนำทางไปยังตัวอักษร 'B' ในเขาวงกตกำแพง ในการเริ่มต้นเรามาดูกันว่าเส้นทางที่ตรงที่สุดไปยังตัวอักษร 'B' จะเป็นอย่างไร 
เริ่มโปรเจกต์ใหม่
- เริ่มโปรเจกต์ข้อความใหม่ และเลือก Wall Maze Playground เมื่อได้รับแจ้ง

- ตั้งชื่อ โครงการUnit5Lesson3

ขับไปที่ตัวอักษร ‘B’
-
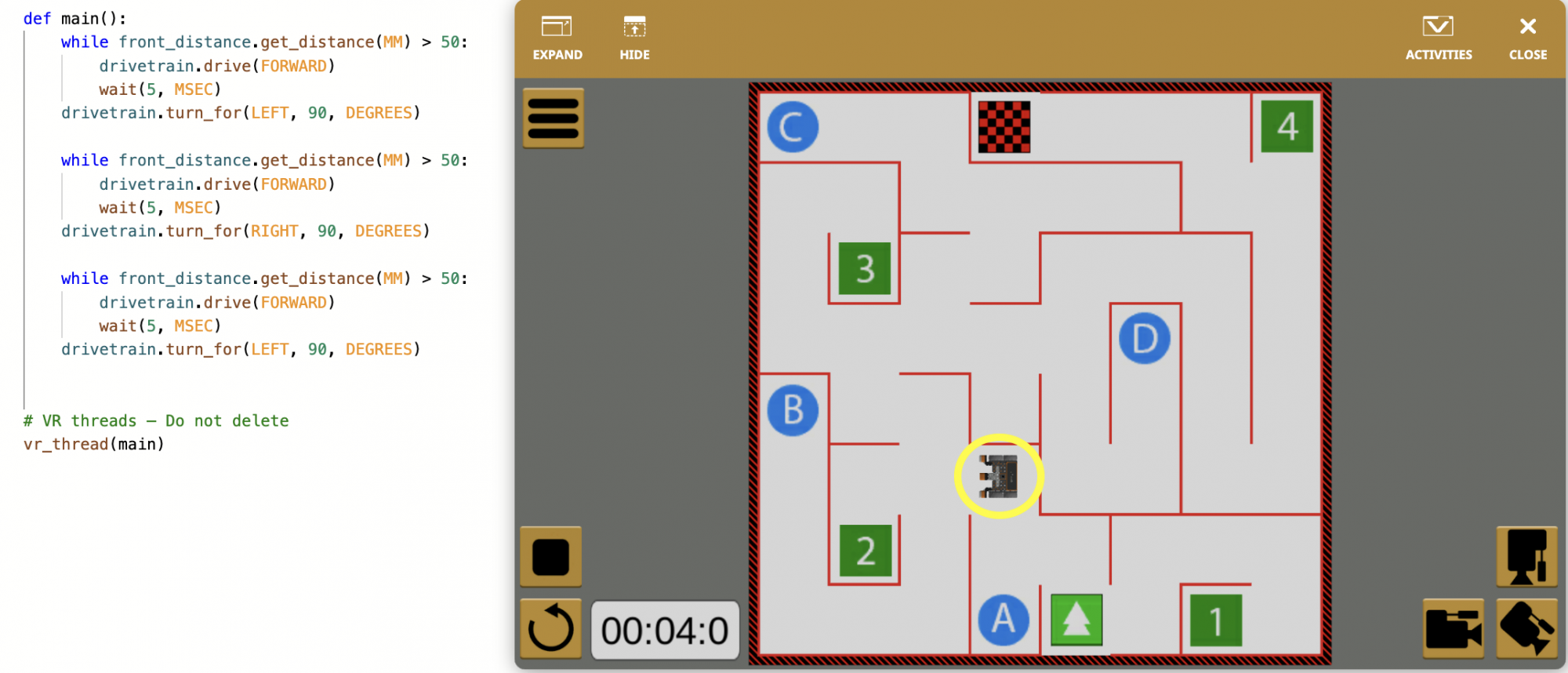
ในการเริ่มต้นการเคลื่อนไหวสองสามครั้งแรกของหุ่นยนต์ VR ของเรามีความคล้ายคลึงกับสิ่งที่เราได้ทำในบทเรียนก่อนหน้านี้ สร้าง โครงการต่อไปนี้เพื่อเริ่มต้นบนเส้นทาง:
def main (): while front_distance.get_distance (MM) > 50: drivetrain.drive ( forward) wait (5, msec) drivetrain.turn_for (LEFT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait (5, msec) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait (5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) - เปิดหน้าต่างสนามเด็กเล่นหากยังไม่ได้เปิด ตรวจสอบให้แน่ใจว่า Wall Maze Playground เปิด และดำเนินโครงการ
- สังเกตจุดที่หุ่นยนต์ VR หยุดณจุดนี้ในโครงการ มันหันหน้าไปทางซ้ายทิศทางที่ถูกต้องเพื่อขับต่อไปยังตัวอักษร 'B'
การหาตำแหน่งการ เลี้ยวที่ต้องการ
ตอนนี้หุ่นยนต์ VR กำลังหันหน้าไปยังทิศทางที่ถูกต้องเพื่อไปยังส่วนถัดไปของเส้นทาง อย่างไรก็ตามหากเราใช้ค่าระยะทางเดียวกันจากเซ็นเซอร์ระยะทางเพื่อดำเนินการต่อเช่นเดียวกับที่เราทำในบทเรียนก่อนหน้านี้หุ่นยนต์ VR จะเดินตามเส้นทางนี้ 
เราสามารถย้อนกลับและใช้คำสั่ง Drivetrain เช่นเดียวกับที่เราทำในหน่วยก่อนหน้าด้วยเซ็นเซอร์กันชนเพื่อไปถึงจุด เปลี่ยนที่ต้องการ ซึ่งอาจมีลักษณะดังนี้:
อย่างไรก็ตามเซ็นเซอร์ระยะทางสามารถใช้เพื่อให้หุ่นยนต์ VR สามารถเลี้ยวได้ ทุก ระยะห่างจากผนัง ในเทิร์นนี้หุ่นยนต์ VR จะอยู่ห่างจากกำแพงมากกว่าเทิร์นอื่นๆ เราสามารถปรับค่าระยะทางในตัวดำเนินการเปรียบเทียบเพื่อให้หุ่นยนต์ VR สามารถหมุนได้ไกลขึ้นจากผนังเพื่อให้โครงการของเราและเส้นทางของหุ่นยนต์ VR มีประสิทธิภาพมากขึ้น
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป