
Lição 3: Ajustando distâncias
Na lição anterior, você usou o sensor de distância e os operadores de comparação para o robô VR dirigir do início ao número ‘1’ no Wall Maze Playground. Nesta lição, você aprenderá a monitorar os valores dos sensores no painel e fazer com que o robô VR dirija do início até a letra ‘B’ no Wall Maze Playground.

Resultados de Aprendizagem
- Identifique se o Painel pode ser usado para monitorar dados do Sensor de Distância.
- Identifique como alterar os parâmetros em um projeto para usar os dados do Sensor de Distância para navegar o Robô VR pelo Wall Maze Playground.
Conduzindo à letra 'B'
Existem várias maneiras de navegar até a letra 'B' no Labirinto da Parede. Para começar, vamos ver qual seria o caminho mais direto para a letra 'B'. 
Iniciar um Novo Projecto
- Inicie um novo projeto de texto e selecione o Wall Maze Playground quando solicitado.

- Nomeie o projeto como Unit5Lesson3.

Dirija-se à letra ‘B’
-
Para começar, os primeiros movimentos do nosso Robô de RV são semelhantes ao que fizemos na Lição anterior. Crie o seguinte projeto para começar no caminho:
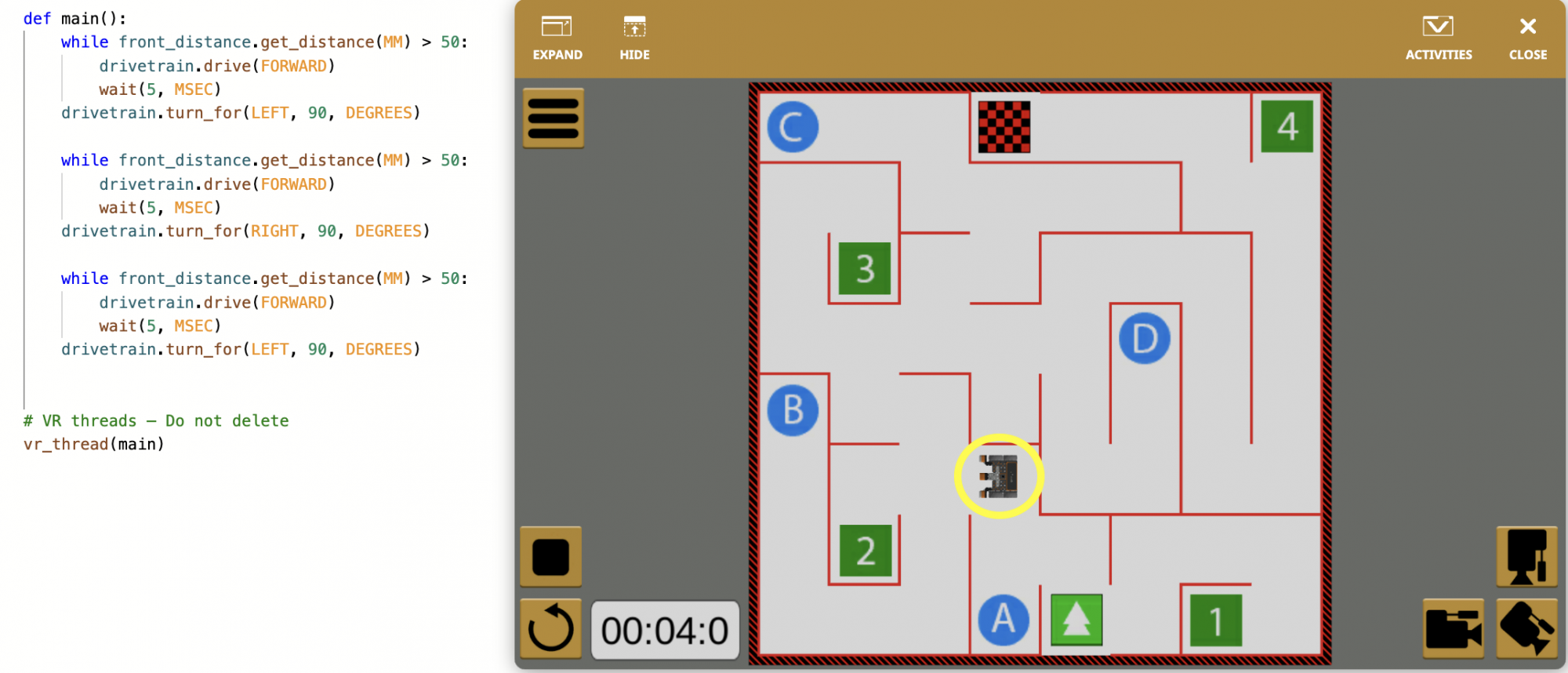
def main(): while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) - Abra a janela do playground se ainda não estiver aberta. Certifique-se de que o Wall Maze Playground abre e execute o projeto.
- Observe onde o Robô VR para neste ponto do projeto. Está virado para a esquerda, a direção correta para continuar a conduzir com a letra 'B'.
Descobrir o Local de Virada Desejado
O Robô VR está agora voltado para a direção correta para continuar para a próxima parte do caminho. No entanto, se usássemos o mesmo valor de distância do Sensor de Distância para continuar, como fizemos na lição anterior, o Robô VR seguiria esse caminho. 
Poderíamos inverter e usar os comandos do sistema de transmissão, como fizemos na unidade anterior com o sensor de pára-choques, para alcançar o ponto de viragem desejado. Pode ficar assim:
No entanto, o sensor de distância pode ser utilizado para permitir que o robô VR faça curvas a a qualquer de uma parede. Neste turno, o Robô VR está mais afastado da parede do que nos outros turnos. Podemos ajustar o valor da distância no operador de comparação, para permitir que o robô VR gire a uma distância maior da parede, para tornar nosso projeto e o caminho do robô VR mais eficientes.
Selecione o botão Seguinte para continuar com o resto desta lição.