
Pelajaran 3: Menyesuaikan Jarak
Pada Pelajaran sebelumnya, Anda menggunakan Sensor Jarak dan operator perbandingan untuk Robot VR untuk melaju dari awal hingga angka '1' pada Wall Maze Playground. Dalam Pelajaran ini, Anda akan mempelajari cara memantau nilai dari sensor di Dasbor, dan menjalankan Robot VR dari awal hingga huruf 'B' di Wall Maze Playground.

Hasil belajar
- Identifikasi bahwa Dasbor dapat digunakan untuk memantau data dari Sensor Jarak.
- Identifikasi cara mengubah parameter dalam proyek untuk menggunakan data Sensor Jarak untuk menavigasi Robot VR melalui Wall Maze Playground.
Mengemudi ke Huruf 'B'
Ada beberapa cara untuk mencapai huruf 'B' di Wall Maze. Untuk memulai, mari kita lihat jalur paling langsung menuju huruf 'B'. 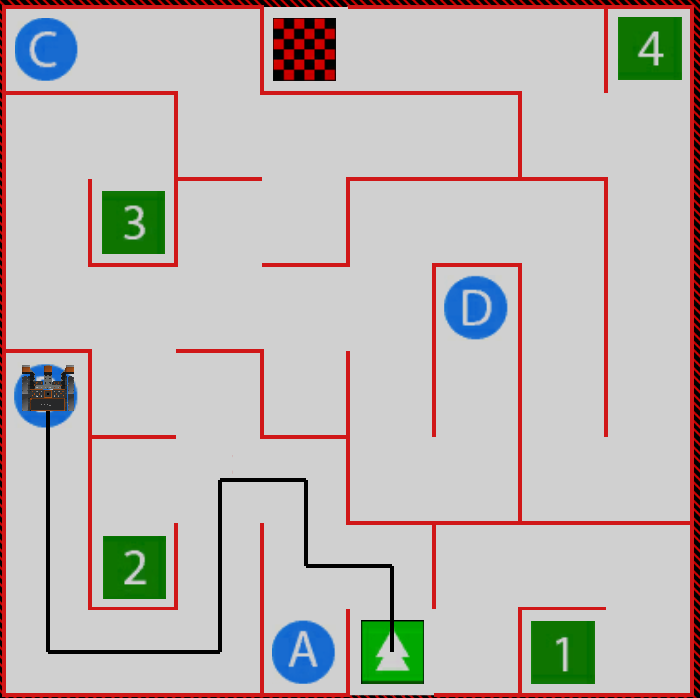
Mulai Proyek Baru
- Mulai proyek teks baru dan pilih Wall Maze Playgroundsaat diminta.
- Beri nama proyek Unit5Pelajaran3.

Berkendara ke Huruf 'B'
-
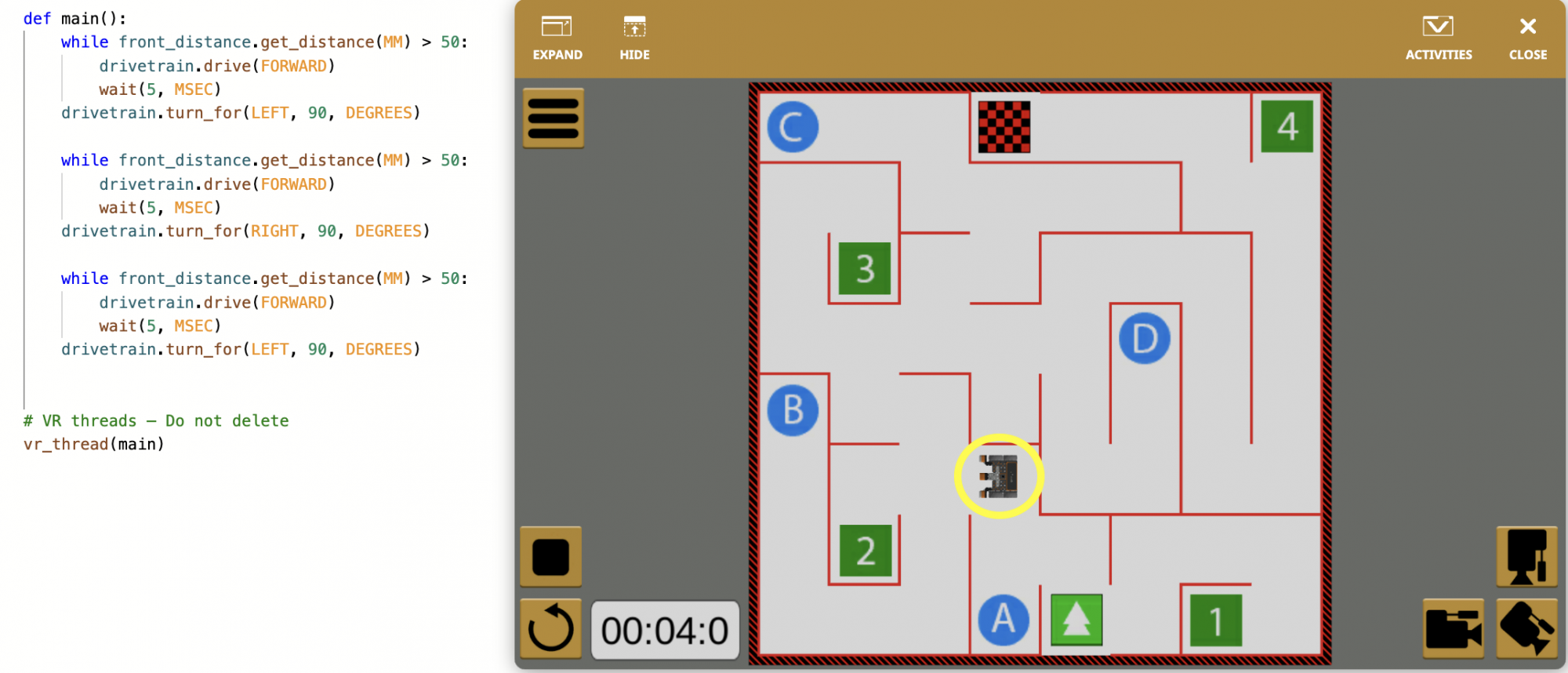
Untuk memulai, beberapa gerakan pertama Robot VR kita mirip dengan apa yang telah kita lakukan pada Pelajaran sebelumnya. Bangun proyek berikut untuk memulai jalur:
def main(): sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke_KIRI, 90, DERAJAT) sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke_KANAN, 90, DERAJAT) sementara jarak_depan.dapatkan_jarak(MM) > 50: drivetrain.berkendara(MAJU) tunggu(5, MSEC) drivetrain.berbelok_ke_KIRI, 90, DERAJAT) - Buka Jendela Taman Bermain jika belum terbuka. PastikanWall Maze Playgroundterbuka, lalu jalankan proyeknya.
- Perhatikan di mana Robot VR berhenti pada titik proyek ini. Menghadap ke kiri, arah yang benar untuk terus berkendara hingga huruf 'B'.
Menentukan Lokasi Belok yang Diinginkan
Robot VR sekarang menghadap arah yang benar untuk melanjutkan ke bagian jalur berikutnya. Namun, jika kita menggunakan nilai jarak yang sama dari Sensor Jarak untuk melanjutkan, seperti yang kita lakukan pada Pelajaran sebelumnya, Robot VR akan mengikuti jalur ini. 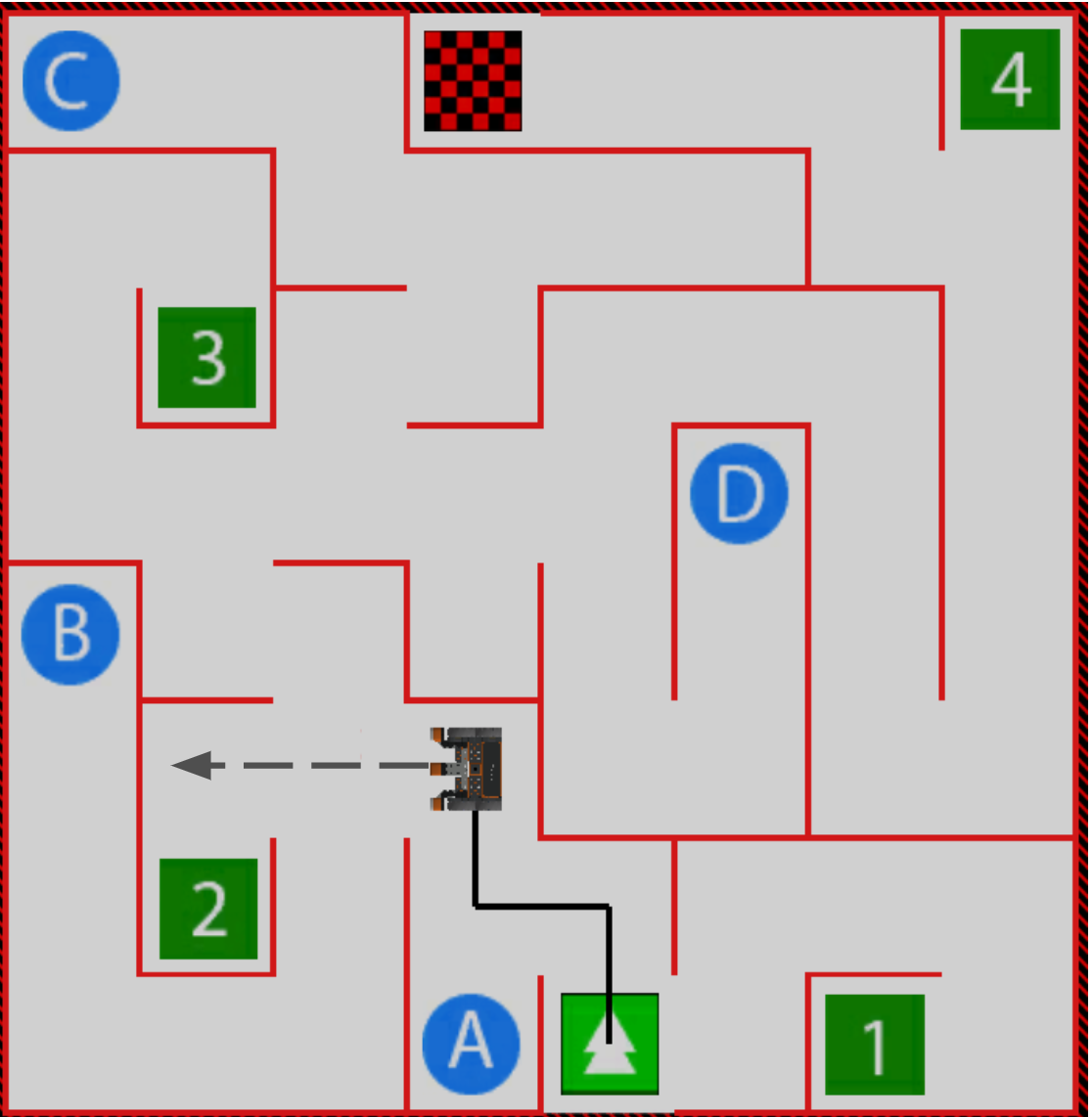
Kita dapat membalikkan dan menggunakan perintah Drivetrain, seperti yang kita lakukan pada Unit sebelumnya dengan Sensor Bumper, untuk mencapai titik balik yang diinginkan. Itu bisa terlihat seperti ini: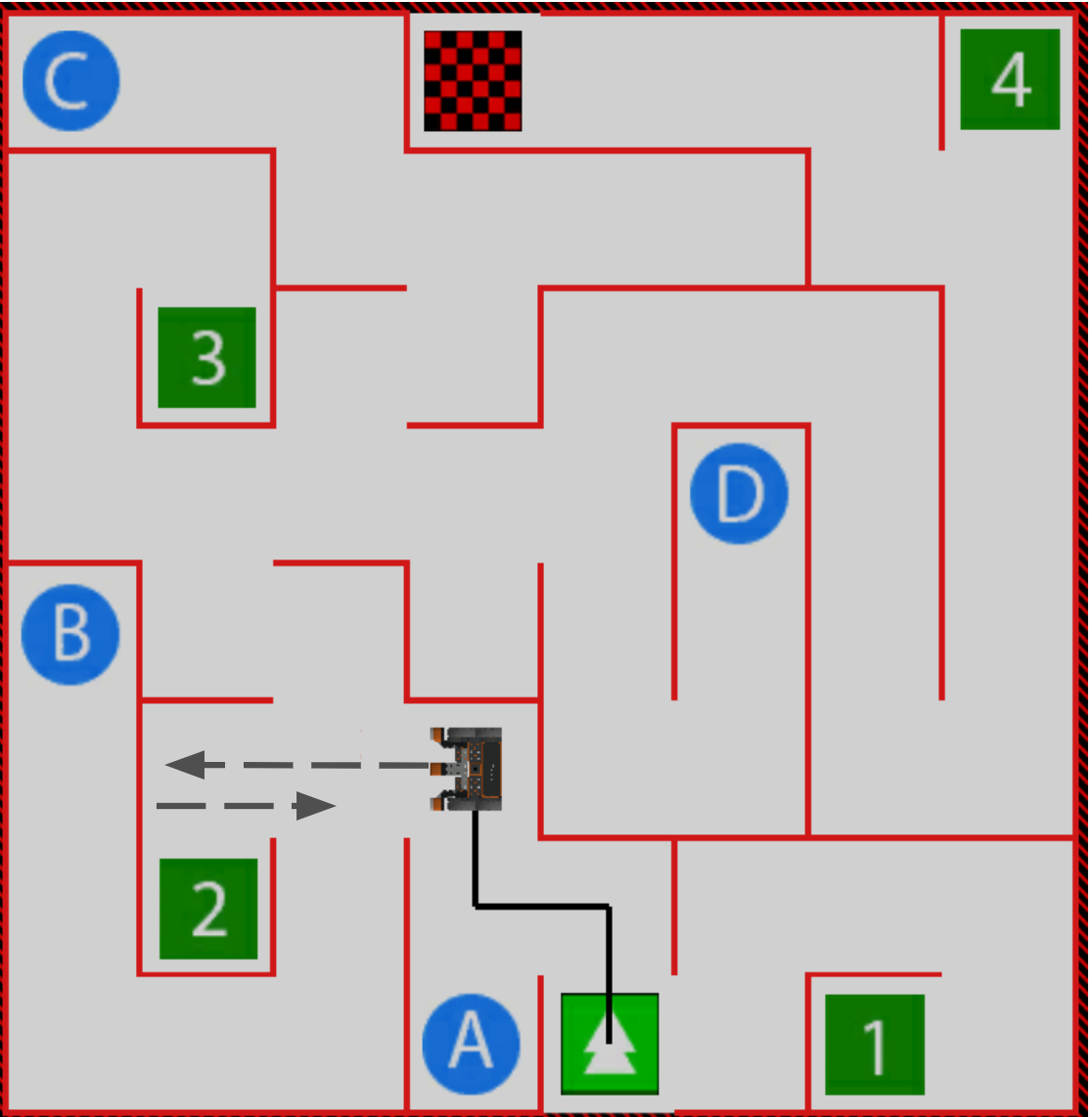
Namun, Sensor Jarak dapat digunakan untuk memungkinkan Robot VR melakukan belokan pada jarak dan dari dinding. Pada putaran ini, Robot VR berada lebih jauh dari dinding dibandingkan putaran lainnya. Kita dapat menyesuaikan nilai jarak pada operator perbandingan, untuk memungkinkan Robot VR berputar pada jarak yang lebih jauh dari dinding, untuk membuat proyek kita, dan lintasan Robot VR, lebih efisien.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.