
പാഠം 3: ദൂരം ക്രമീകരിക്കൽ
മുൻ പാഠത്തിൽ, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ തുടക്കം മുതൽ '1' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യാൻ VR റോബോട്ടിനായുള്ള ഡിസ്റ്റൻസ് സെൻസറും താരതമ്യ ഓപ്പറേറ്ററുകളും നിങ്ങൾ ഉപയോഗിച്ചു. ഈ പാഠത്തിൽ, ഡാഷ്ബോർഡിലെ സെൻസറുകളിൽ നിന്നുള്ള മൂല്യങ്ങൾ എങ്ങനെ നിരീക്ഷിക്കാമെന്നും, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ തുടക്കം മുതൽ 'B' എന്ന അക്ഷരം വരെ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നതെങ്ങനെയെന്നും നിങ്ങൾ പഠിക്കും.

പഠന ഫലങ്ങൾ
- ഡിസ്റ്റൻസ് സെൻസറിൽ നിന്നുള്ള ഡാറ്റ നിരീക്ഷിക്കാൻ ഡാഷ്ബോർഡ് ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ടിലൂടെ VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിന് ഡിസ്റ്റൻസ് സെൻസർ ഡാറ്റ ഉപയോഗിക്കുന്നതിന് ഒരു പ്രോജക്റ്റിലെ പാരാമീറ്ററുകൾ എങ്ങനെ മാറ്റാമെന്ന് തിരിച്ചറിയുക.
'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നു
വാൾ മേസിൽ 'B' എന്ന അക്ഷരത്തിലേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ നിരവധി മാർഗങ്ങളുണ്ട്. ആദ്യം, 'B' എന്ന അക്ഷരത്തിലേക്കുള്ള ഏറ്റവും നേരിട്ടുള്ള പാത ഏതായിരിക്കുമെന്ന് നോക്കാം. 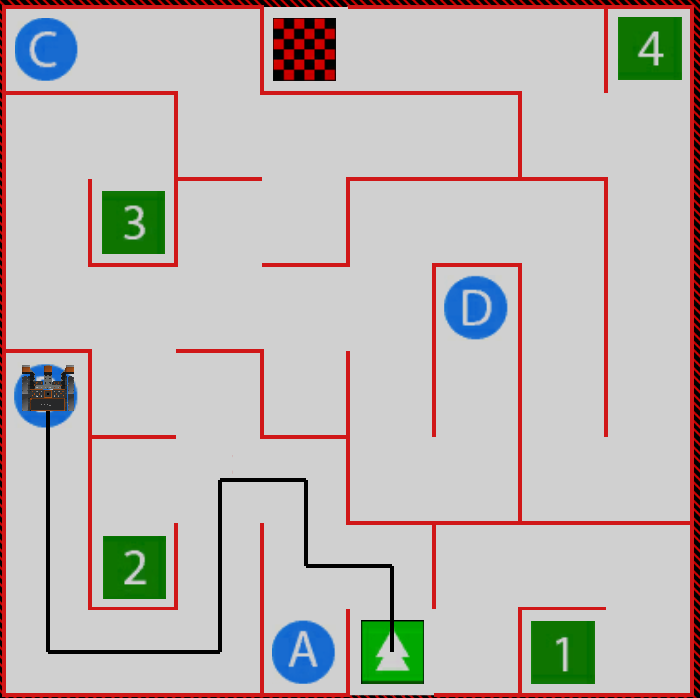
ഒരു പുതിയ പദ്ധതി ആരംഭിക്കുക
- ഒരു പുതിയ ടെക്സ്റ്റ് പ്രോജക്റ്റ് ആരംഭിച്ച് ആവശ്യപ്പെടുമ്പോൾ വാൾ മേസ് പ്ലേഗ്രൗണ്ട്തിരഞ്ഞെടുക്കുക.
- പ്രോജക്റ്റിന് എന്ന് പേര് നൽകുക യൂണിറ്റ്5പാഠം.

'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക
-
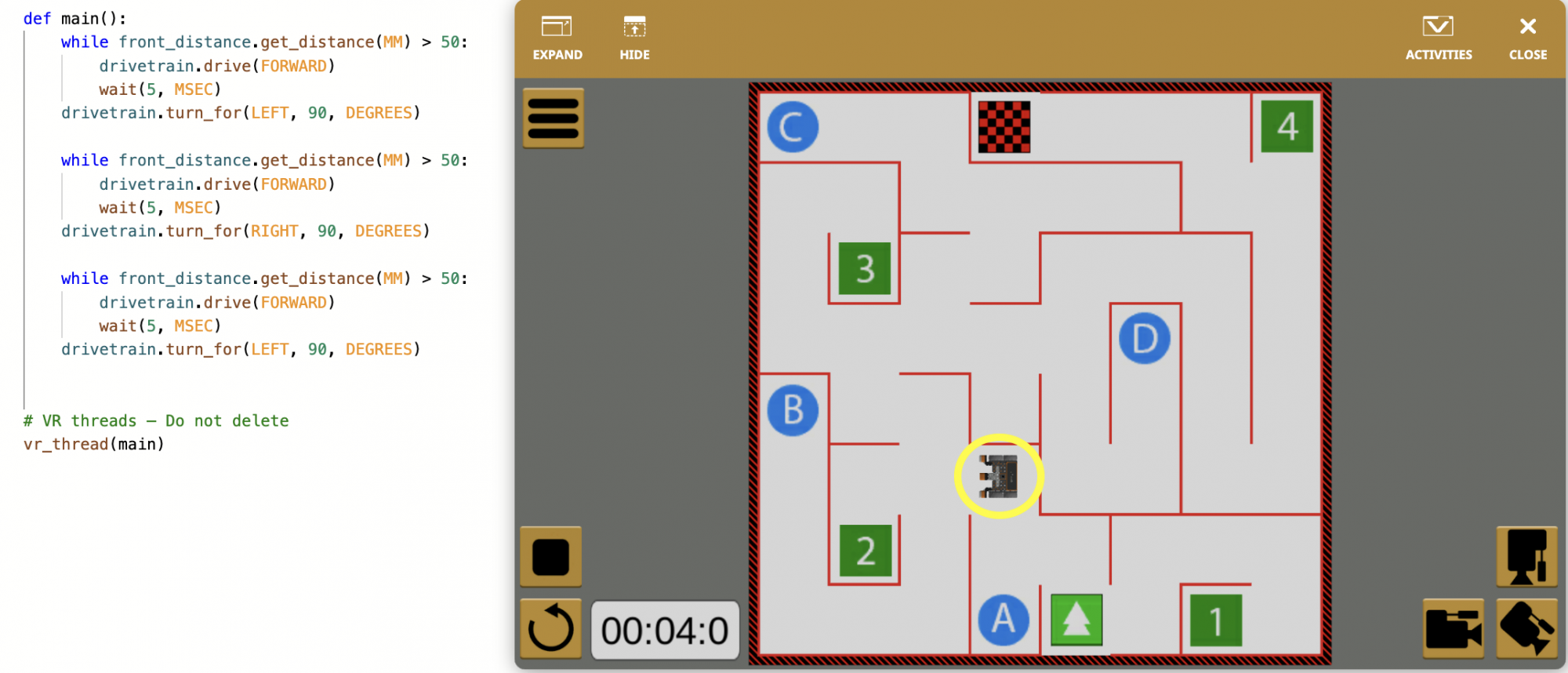
ആദ്യം, നമ്മുടെ VR റോബോട്ടിന്റെ ആദ്യത്തെ കുറച്ച് ചലനങ്ങൾ നമ്മൾ മുൻ പാഠത്തിൽ ചെയ്തതിന് സമാനമാണ്. പാതയിൽ ആരംഭിക്കുന്നതിന് ഇനിപ്പറയുന്ന പ്രോജക്റ്റ് നിർമ്മിക്കുക:
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - പ്ലേഗ്രൗണ്ട് വിൻഡോ തുറന്നിട്ടില്ലെങ്കിൽ അത് തുറക്കുക. വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്തുറക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കുക, തുടർന്ന് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- പ്രോജക്റ്റിലെ ഈ ഘട്ടത്തിൽ VR റോബോട്ട് എവിടെയാണ് നിർത്തുന്നതെന്ന് ശ്രദ്ധിക്കുക. ഇത് ഇടതുവശത്തേക്ക് അഭിമുഖമാണ്, 'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവിംഗ് തുടരുന്നതിനുള്ള ശരിയായ ദിശ.
ആവശ്യമുള്ള തിരിയൽ സ്ഥലം കണ്ടെത്തുന്നു
പാതയുടെ അടുത്ത ഭാഗത്തേക്ക് പോകുന്നതിന് VR റോബോട്ട് ഇപ്പോൾ ശരിയായ ദിശയിലേക്ക് തിരിയുന്നു. എന്നിരുന്നാലും, നമ്മൾ മുമ്പത്തെ പാഠത്തിൽ ചെയ്തതുപോലെ, ഡിസ്റ്റൻസ് സെൻസറിൽ നിന്നുള്ള അതേ ദൂര മൂല്യം ഉപയോഗിച്ചാൽ, VR റോബോട്ട് ഈ പാത പിന്തുടരും. 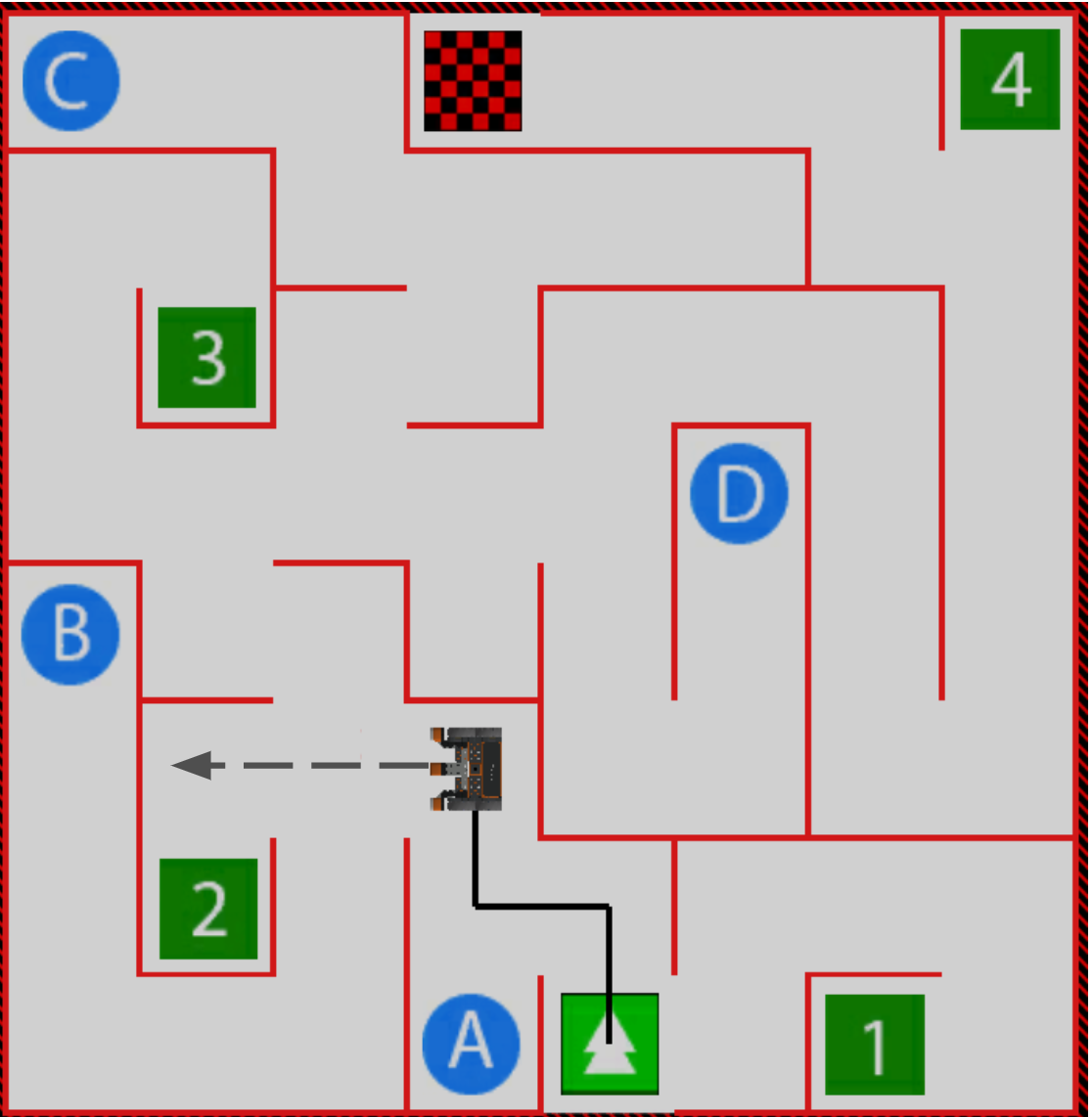
ബമ്പർ സെൻസറുള്ള മുൻ യൂണിറ്റിൽ ചെയ്തതുപോലെ, നമുക്ക് ഡ്രൈവ്ട്രെയിൻ കമാൻഡുകൾ റിവേഴ്സ് ചെയ്ത് ഉപയോഗിച്ച് ആവശ്യമുള്ള ടേണിംഗ് പോയിന്റിൽ എത്താൻ കഴിയും. അത് ഇതുപോലെ കാണപ്പെടാം: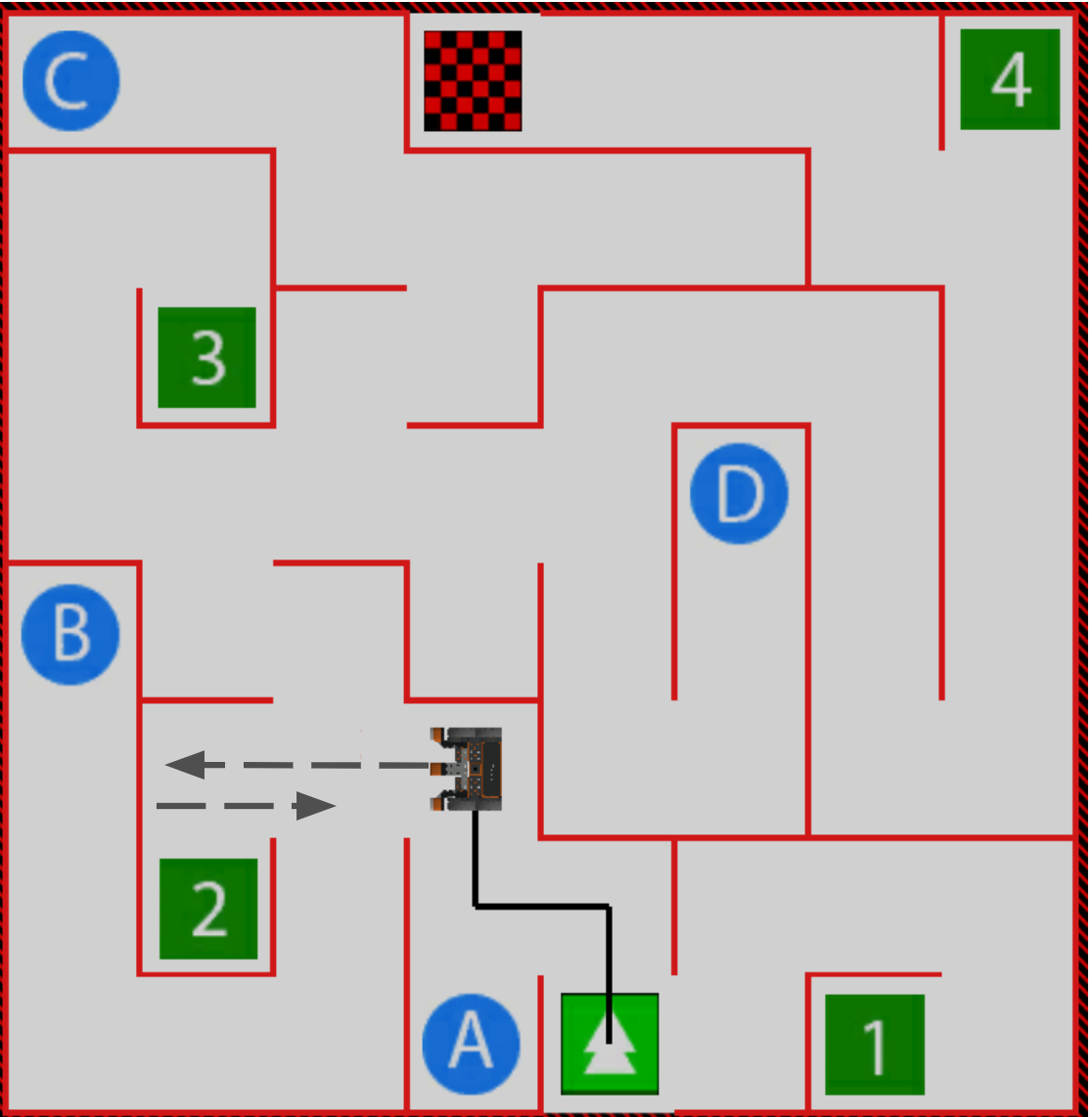
എന്നിരുന്നാലും, ഡിസ്റ്റൻസ് സെൻസർ ഉപയോഗിച്ച് VR റോബോട്ടിന് ഒരു ഭിത്തിയിൽ നിന്ന് ഏതെങ്കിലും അകലത്തിൽ തിരിവുകൾ നടത്താൻ കഴിയും. ഈ വളവിൽ, മറ്റ് വളവുകളെ അപേക്ഷിച്ച് വിആർ റോബോട്ട് മതിലിൽ നിന്ന് കൂടുതൽ അകലെയാണ്. താരതമ്യ ഓപ്പറേറ്ററിൽ നമുക്ക് ദൂര മൂല്യം ക്രമീകരിക്കാൻ കഴിയും, അതുവഴി VR റോബോട്ടിന് ചുമരിൽ നിന്ന് കൂടുതൽ അകലത്തിൽ തിരിയാൻ കഴിയും, അതുവഴി നമ്മുടെ പ്രോജക്റ്റും VR റോബോട്ടിന്റെ പാതയും കൂടുതൽ കാര്യക്ഷമമാക്കാം.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.