
पाठ 3: दूरियों को समायोजित करना
पिछले पाठ में, आपने वीआर रोबोट को वॉल भूलभुलैया खेल के मैदानपर शुरुआत से नंबर '1' तक ड्राइव करने के लिए दूरी सेंसर और तुलना ऑपरेटरों का उपयोग किया था। इस पाठ में, आप सीखेंगे कि डैशबोर्ड में सेंसर से मूल्यों की निगरानी कैसे करें, और वीआर रोबोट को वॉल भूलभुलैया खेल के मैदानपर अक्षर 'बी' तक कैसे चलाएं।

सीखने के परिणाम
- पहचान करें कि डैशबोर्ड का उपयोग दूरी सेंसर से डेटा की निगरानी के लिए किया जा सकता है।
- दीवार भूलभुलैया खेल के मैदान के माध्यम से वीआर रोबोट को नेविगेट करने के लिए दूरी सेंसर डेटा का उपयोग करने के लिए एक परियोजना में मापदंडों को बदलने का तरीका पहचानें।
अक्षर 'B' तक ड्राइविंग
दीवार भूलभुलैया में अक्षर 'बी' तक पहुंचने के कई तरीके हैं। सबसे पहले, आइए देखें कि अक्षर 'बी' तक पहुंचने का सबसे सीधा रास्ता क्या होगा। 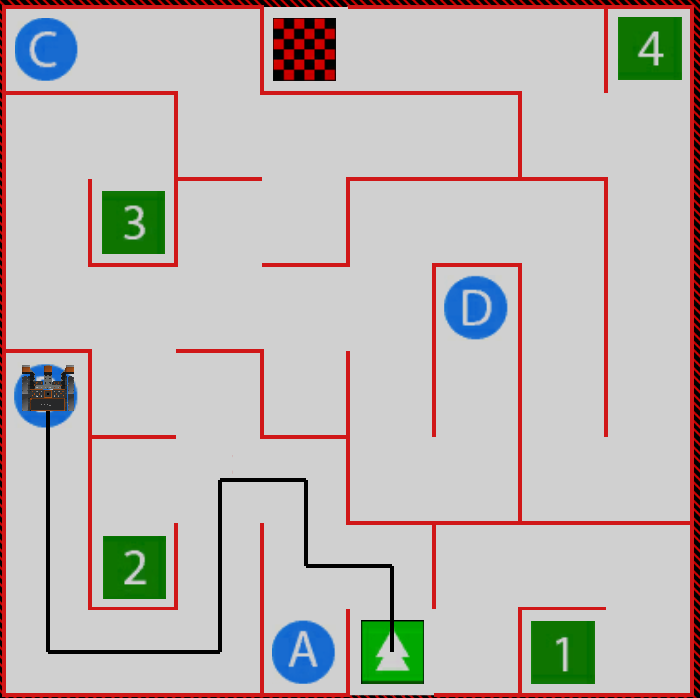
एक नई परियोजना शुरू करें
- एक नया टेक्स्ट प्रोजेक्ट शुरू करें और संकेत मिलने पर वॉल मेज़ प्लेग्राउंडका चयन करें।
- प्रोजेक्ट का नाम यूनिट5पाठरखें.

अक्षर 'B' तक ड्राइव करें
-
आरंभ करने के लिए, हमारे वी.आर. रोबोट की पहली कुछ गतिविधियां वैसी ही हैं जैसी हमने पिछले पाठ में की थीं। इस पथ पर आगे बढ़ने के लिए निम्नलिखित परियोजना बनाएं:
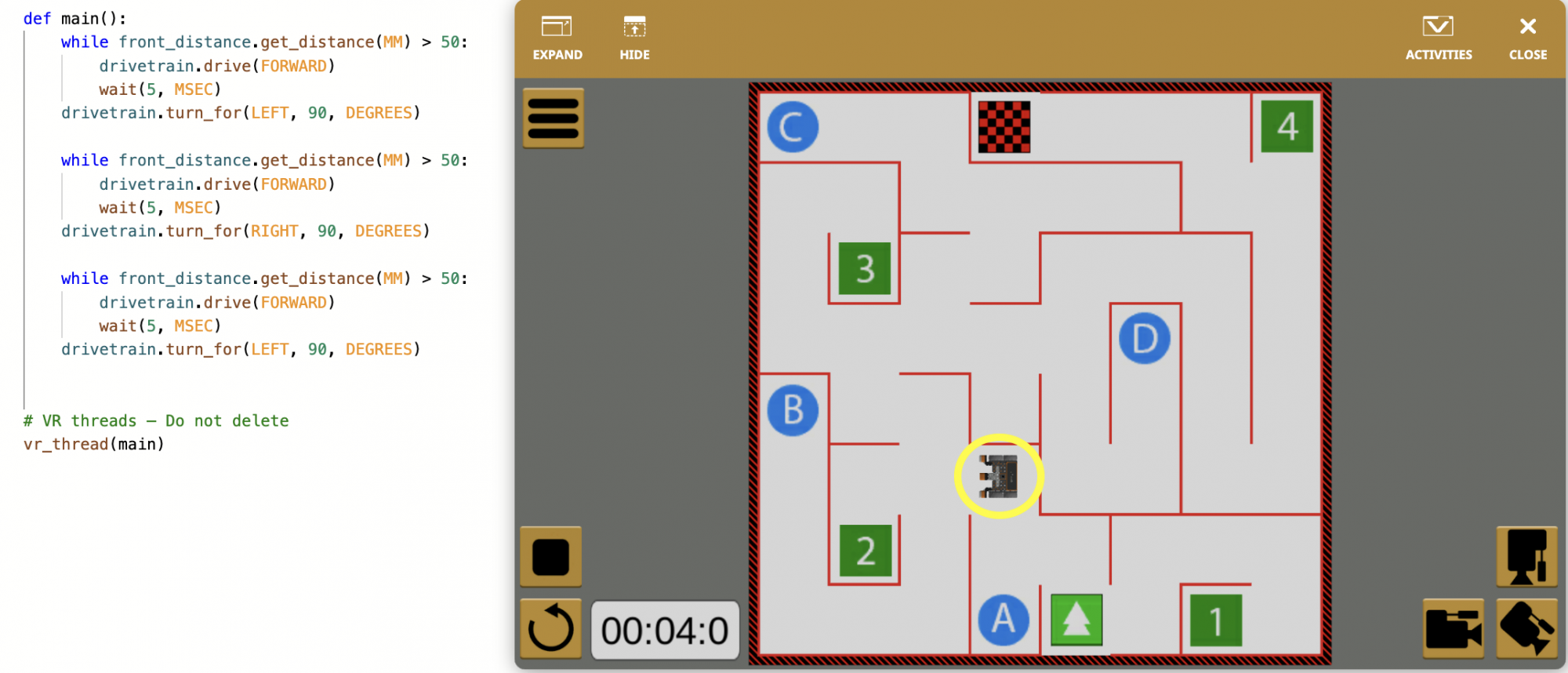
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - यदि प्लेग्राउंड विंडो पहले से खुली नहीं है तो उसे खोलें। सुनिश्चित करें किवॉल मेज़ प्लेग्राउंडखुलता है, और प्रोजेक्ट चलाएं।
- ध्यान दें कि परियोजना के इस बिंदु पर VR रोबोट कहां रुकता है। यह बाईं ओर है, जो अक्षर 'B' तक ड्राइविंग जारी रखने के लिए सही दिशा है।
वांछित मोड़ स्थान का पता लगाना
वीआर रोबोट अब पथ के अगले भाग पर जाने के लिए सही दिशा की ओर उन्मुख है। हालाँकि, यदि हम आगे बढ़ने के लिए दूरी सेंसर से समान दूरी मान का उपयोग करते हैं, जैसा कि हमने पिछले पाठ में किया था, तो वीआर रोबोट इसी पथ का अनुसरण करेगा। 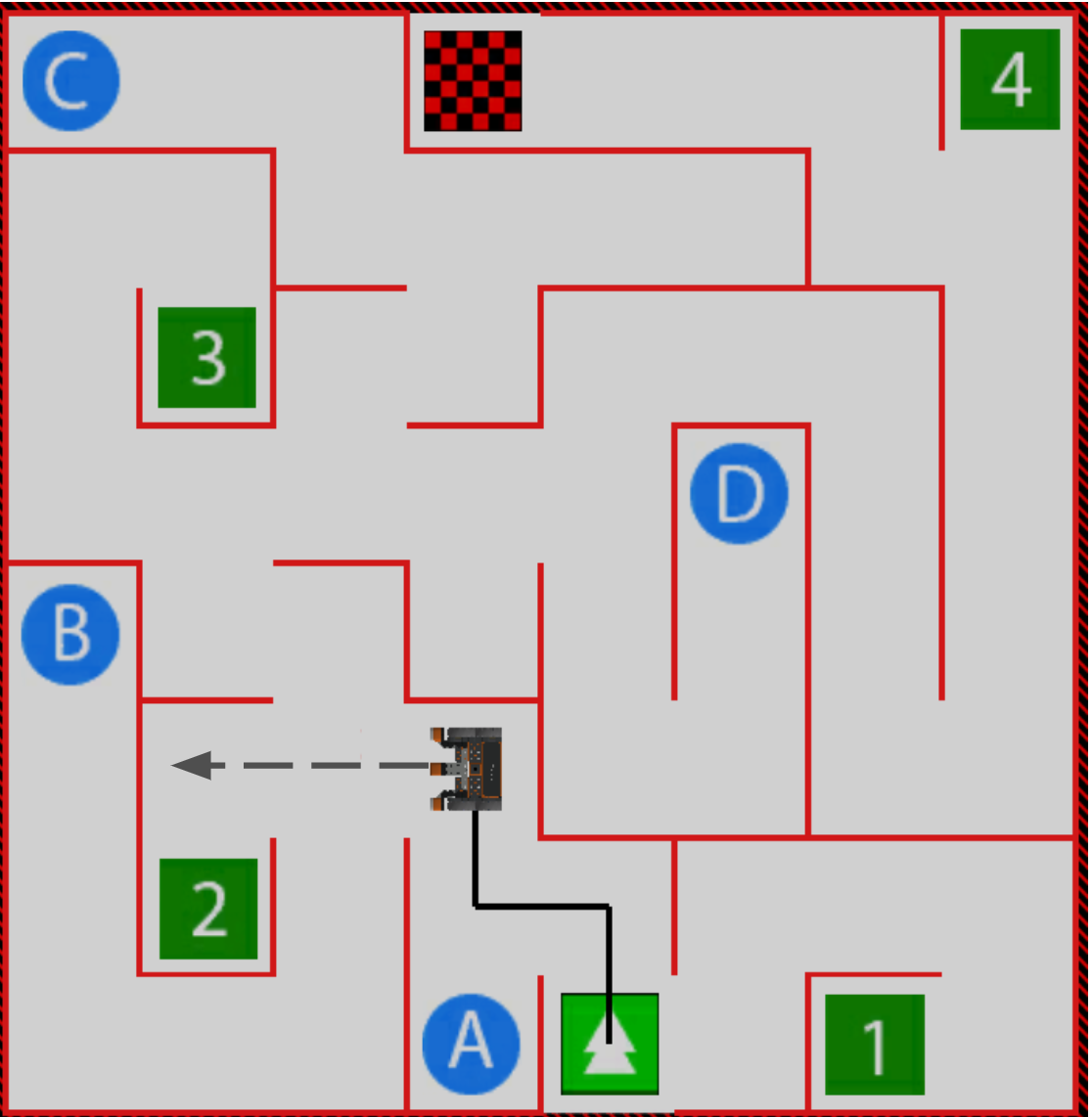
हम वांछित मोड़ तक पहुंचने के लिए रिवर्स कर सकते हैं और ड्राइवट्रेन कमांड का उपयोग कर सकते हैं, जैसा कि हमने पिछली यूनिट में बम्पर सेंसर के साथ किया था। यह इस तरह दिख सकता है: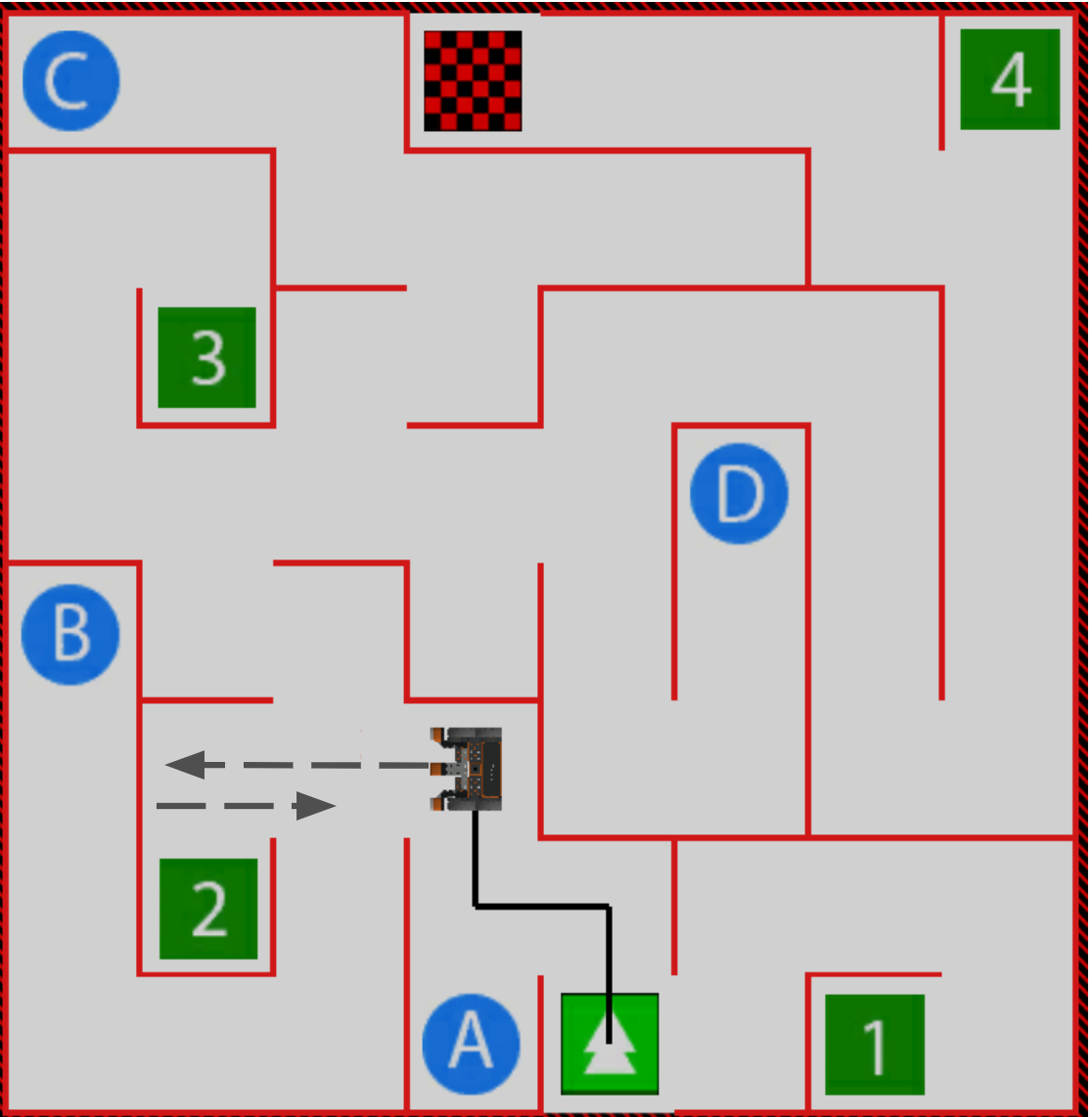
हालाँकि, दूरी सेंसर का उपयोग वीआर रोबोट को दीवार से या दूरी पर मोड़ लेने की अनुमति देने के लिए किया जा सकता है। इस मोड़ पर, वीआर रोबोट अन्य मोड़ों की तुलना में दीवार से अधिक दूर है। हम तुलना ऑपरेटर में दूरी मान को समायोजित कर सकते हैं, ताकि वीआर रोबोट दीवार से अधिक दूरी पर मुड़ सके, जिससे हमारा प्रोजेक्ट और वीआर रोबोट का पथ अधिक कुशल हो सके।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।