
Lección 3: Ajuste de distancias
En la lección anterior, utilizó el sensor de distancia y los operadores de comparación para el robot VR para conducir desde el inicio hasta el número ‘1‘ en el patio de recreo del laberinto de pared. En esta lección, aprenderá a monitorear los valores de los sensores en el panel de control y a hacer que el robot de realidad virtual se mueva desde el inicio hasta la letra "B" en el patio de recreo del laberinto de la pared.

Resultados de aprendizaje
- Identifique que el panel de control se puede utilizar para monitorear los datos del sensor de distancia.
- Identifique cómo cambiar los parámetros en un proyecto para usar los datos del sensor de distancia para navegar por el robot VR a través del patio de recreo del laberinto de paredes.
Conducir hasta la letra "B"
Hay varias formas de navegar hasta la letra "B" en el laberinto de la pared. Para empezar, veamos cuál sería la ruta más directa a la letra 'B'. 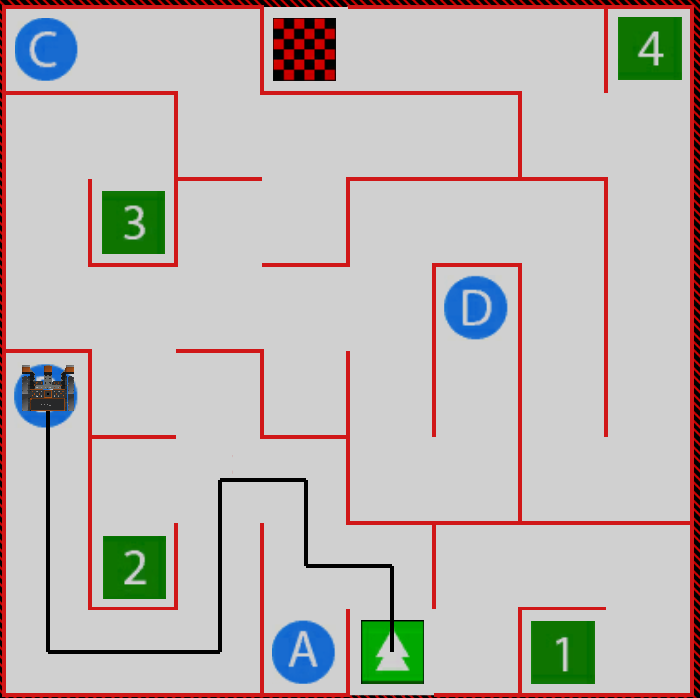
Iniciar un nuevo proyecto
- Inicie un nuevo proyecto de texto y seleccione Wall Maze Playground cuando se le solicite.
- Nombra el proyecto Unit5Lesson3.

Conduce hasta la letra "B"
-
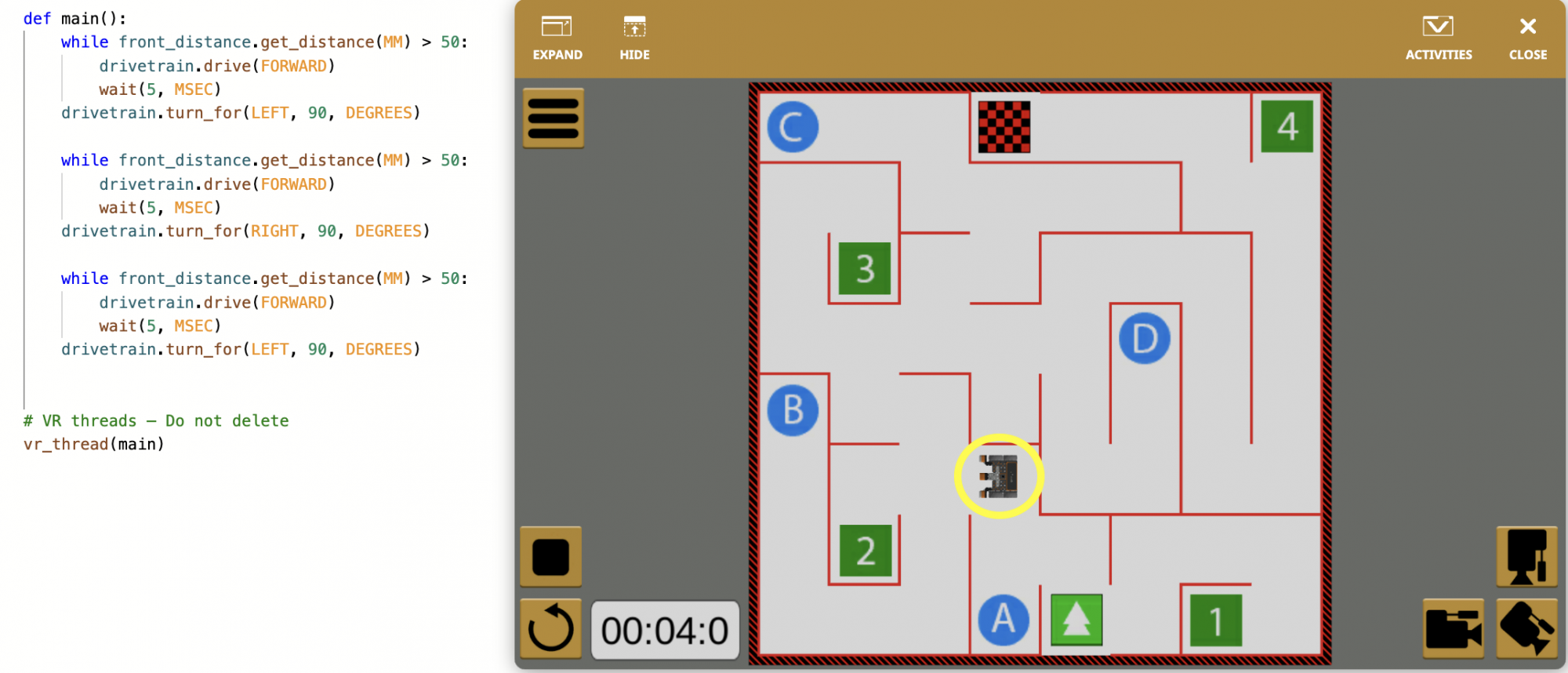
Para empezar, los primeros movimientos de nuestro robot de realidad virtual son similares a los que hemos hecho en la lección anterior. Construya el siguiente proyecto para comenzar en el camino:
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) - Abra la ventana del patio de recreo si aún no está abierta. Asegúrese de que el laberinto de pared Playground se y ejecute el proyecto.
- Observe dónde se detiene el robot de realidad virtual en este punto del proyecto. Está orientado a la izquierda, la dirección correcta para continuar conduciendo hasta la letra 'B'.
Averiguar la ubicación de giro deseada
El robot de realidad virtual ahora se enfrenta a la dirección correcta para continuar con la siguiente parte del camino. Sin embargo, si usamos el mismo valor de distancia del sensor de distancia para continuar, como lo hicimos en la lección anterior, el robot VR seguiría este camino. 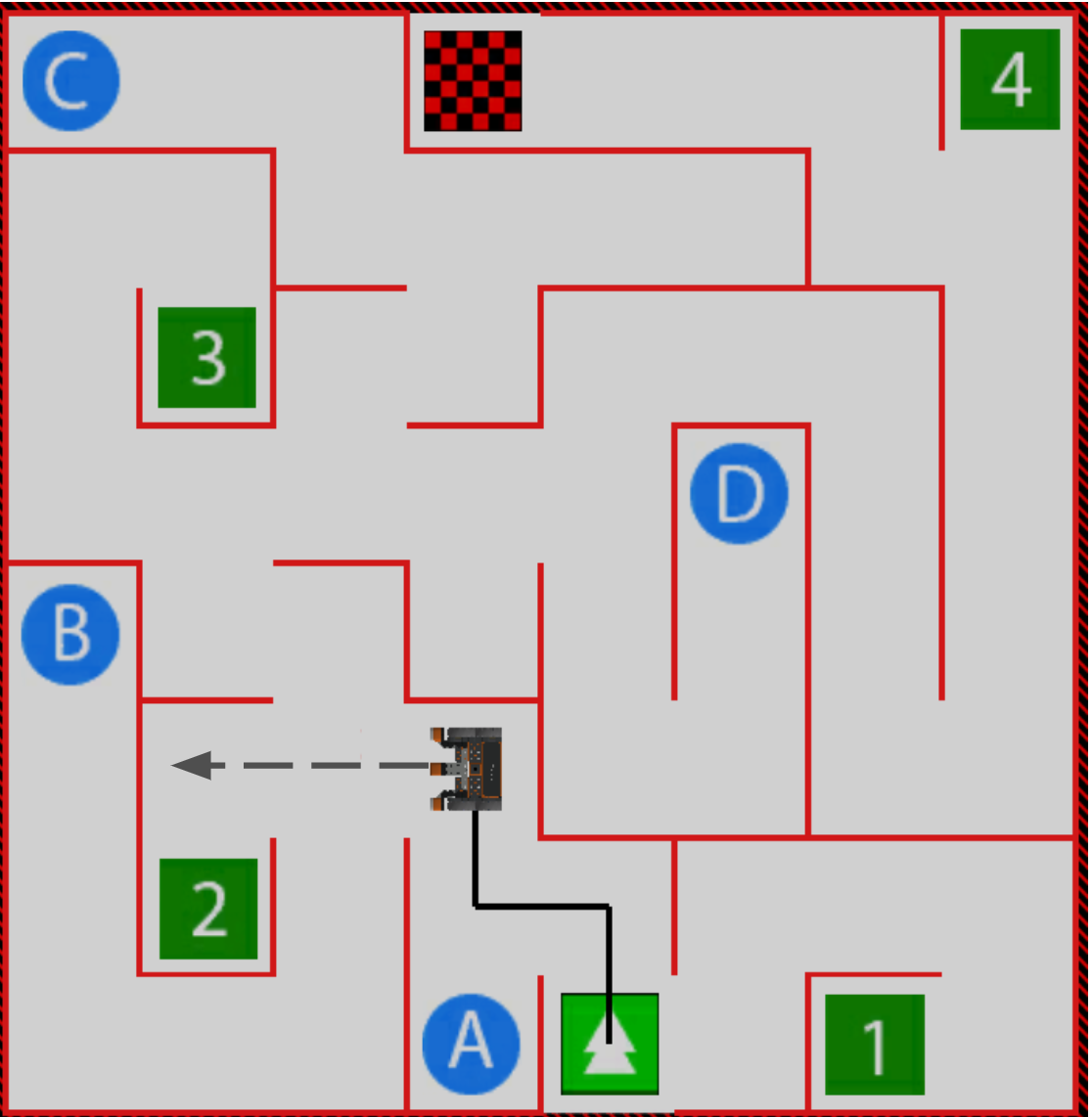
Podríamos invertir y usar los comandos del tren motriz, como lo hicimos en la unidad anterior con el sensor del parachoques, para alcanzar el punto de inflexión deseado. Podría verse así: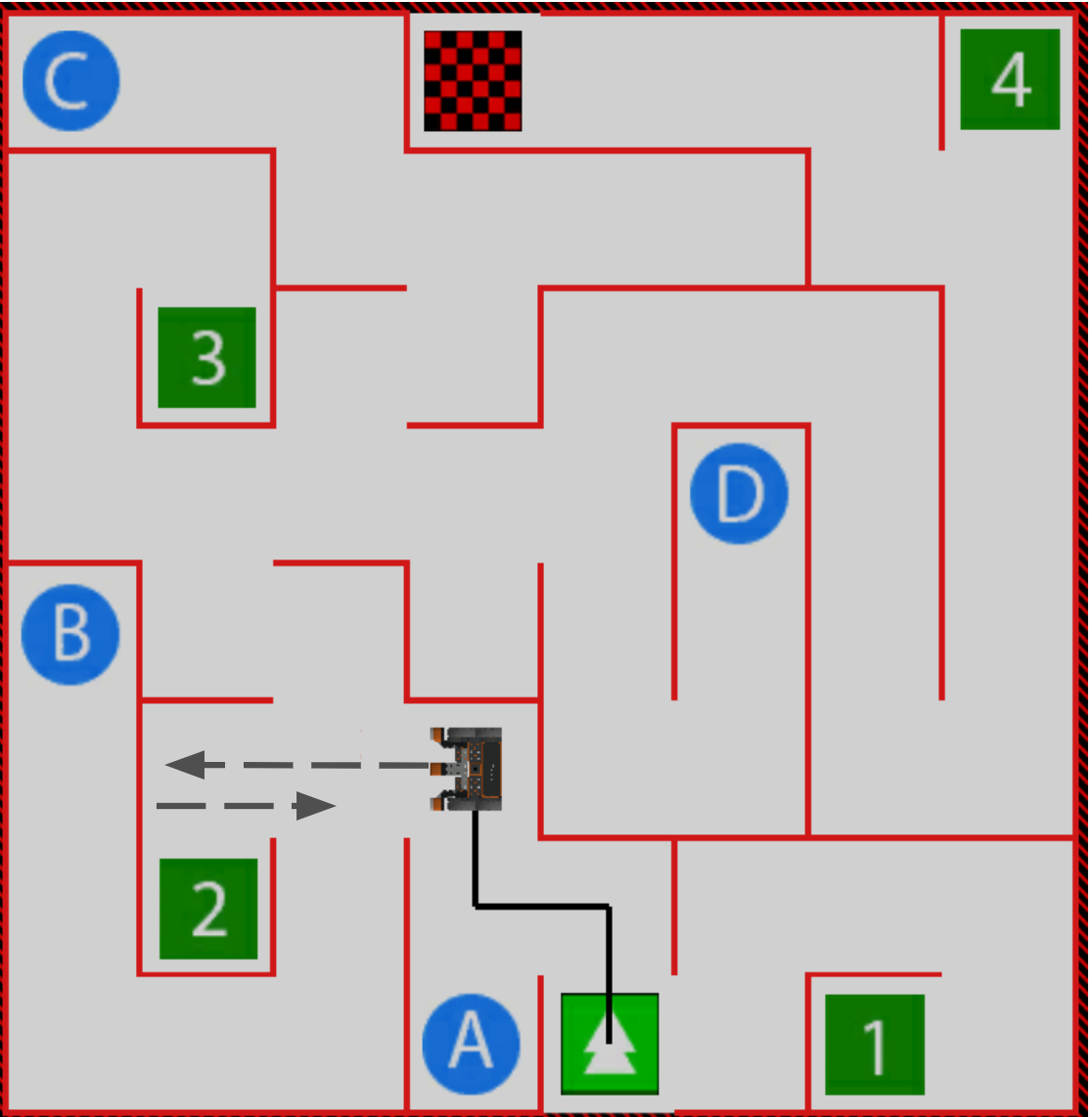
Sin embargo, el sensor de distancia se puede utilizar para permitir que el robot VR realice giros a cualquier distancia de una pared. En este giro, el robot VR está más alejado de la pared que otros giros. Podemos ajustar el valor de la distancia en el operador de comparación, para permitir que el robot VR gire a una distancia adicional de la pared, para hacer que nuestro proyecto y la ruta del robot VR sean más eficientes.
Seleccione el botón Siguiente para continuar con el resto de esta lección.