
পাঠ ৩: দূরত্ব সমন্বয় করা
আগের পাঠে, আপনি Wall Maze Playground-এ শুরু থেকে '1' নম্বরে গাড়ি চালানোর জন্য VR রোবটের জন্য দূরত্ব সেন্সর এবং তুলনা অপারেটর ব্যবহার করেছিলেন। এই পাঠে, আপনি শিখবেন কিভাবে ড্যাশবোর্ডের সেন্সর থেকে মানগুলি পর্যবেক্ষণ করতে হয় এবং ওয়াল মেজ প্লেগ্রাউন্ড-এ শুরু থেকে 'B' অক্ষর পর্যন্ত VR রোবট ড্রাইভ রাখতে হয়।

শেখার ফলাফল
- দূরত্ব সেন্সর থেকে ডেটা নিরীক্ষণের জন্য ড্যাশবোর্ড ব্যবহার করা যেতে পারে তা চিহ্নিত করুন।
- ওয়াল মেজ প্লেগ্রাউন্ডের মাধ্যমে ভিআর রোবট নেভিগেট করার জন্য দূরত্ব সেন্সর ডেটা ব্যবহার করে একটি প্রকল্পে প্যারামিটারগুলি কীভাবে পরিবর্তন করবেন তা চিহ্নিত করুন।
'B' অক্ষরের দিকে গাড়ি চালানো
ওয়াল মেজে 'বি' অক্ষরে নেভিগেট করার বিভিন্ন উপায় রয়েছে। শুরুতে, আসুন দেখি 'B' অক্ষরের সবচেয়ে সরাসরি পথ কী হবে। 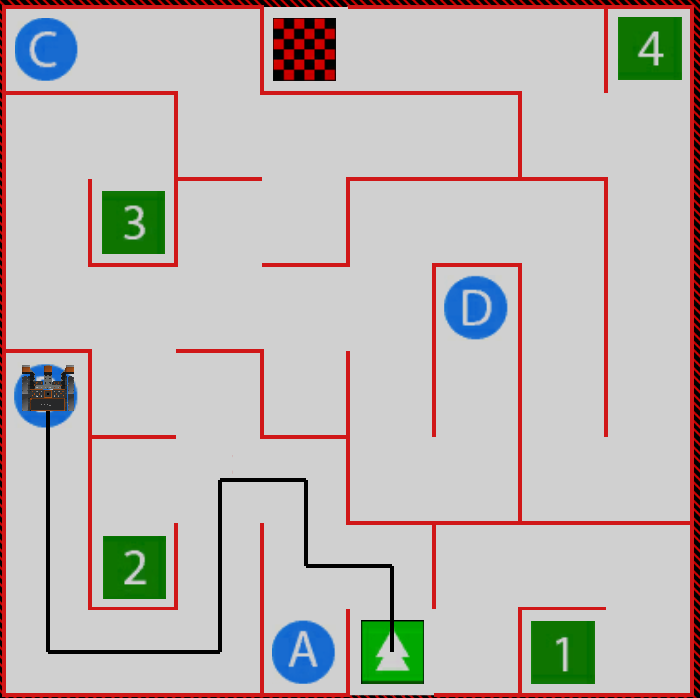
একটি নতুন প্রকল্প শুরু করুন
- একটি নতুন টেক্সট প্রজেক্ট শুরু করুন এবং অনুরোধ করা হলে ওয়াল মেজ প্লেগ্রাউন্ডনির্বাচন করুন।
- প্রকল্পটির নাম দিন Unit5 Lesson3।

'বি' অক্ষরে ড্রাইভ করুন
-
শুরুতে, আমাদের ভিআর রোবটের প্রথম কয়েকটি নড়াচড়া পূর্ববর্তী পাঠে আমরা যা করেছি তার অনুরূপ। পথ শুরু করার জন্য নিম্নলিখিত প্রকল্পটি তৈরি করুন:
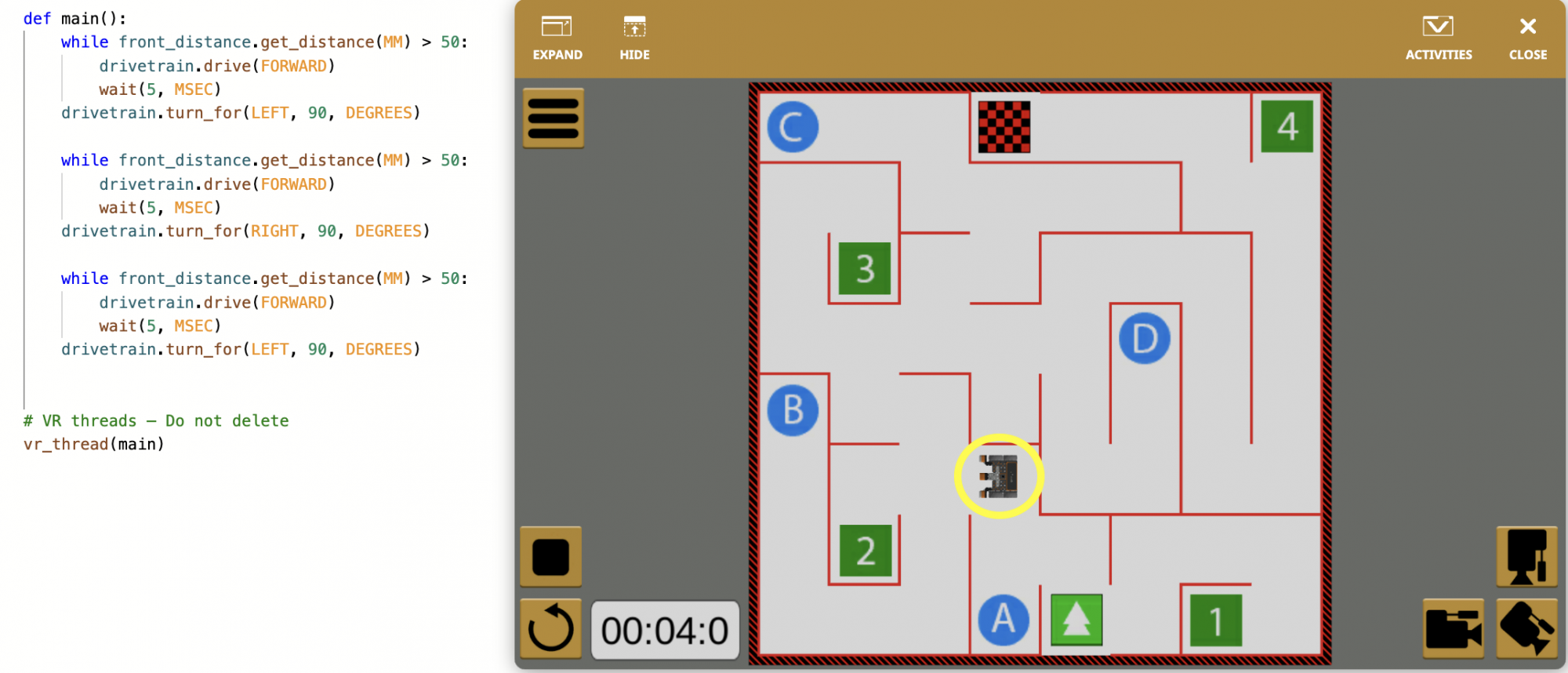
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - খেলার মাঠের উইন্ডোটি খুলুন যদি এটি ইতিমধ্যে খোলা না থাকে। নিশ্চিত করুন যেওয়াল মেজ প্লেগ্রাউন্ডখোলে, এবং প্রকল্পটি চালান।
- প্রজেক্টের এই মুহুর্তে VR রোবট কোথায় থামবে তা লক্ষ্য করুন। এটি বাম দিকে মুখ করে আছে, 'B' অক্ষরের দিকে গাড়ি চালিয়ে যাওয়ার জন্য এটি সঠিক দিক।
পছন্দসই বাঁকের স্থান নির্ধারণ করা
VR রোবট এখন পথের পরবর্তী অংশে যেতে সঠিক দিকনির্দেশের মুখোমুখি হচ্ছে। তবে, যদি আমরা পূর্ববর্তী পাঠের মতো দূরত্ব সেন্সর থেকে একই দূরত্বের মান ব্যবহার করে কাজ চালিয়ে যাই, তাহলে VR রোবট এই পথ অনুসরণ করবে। 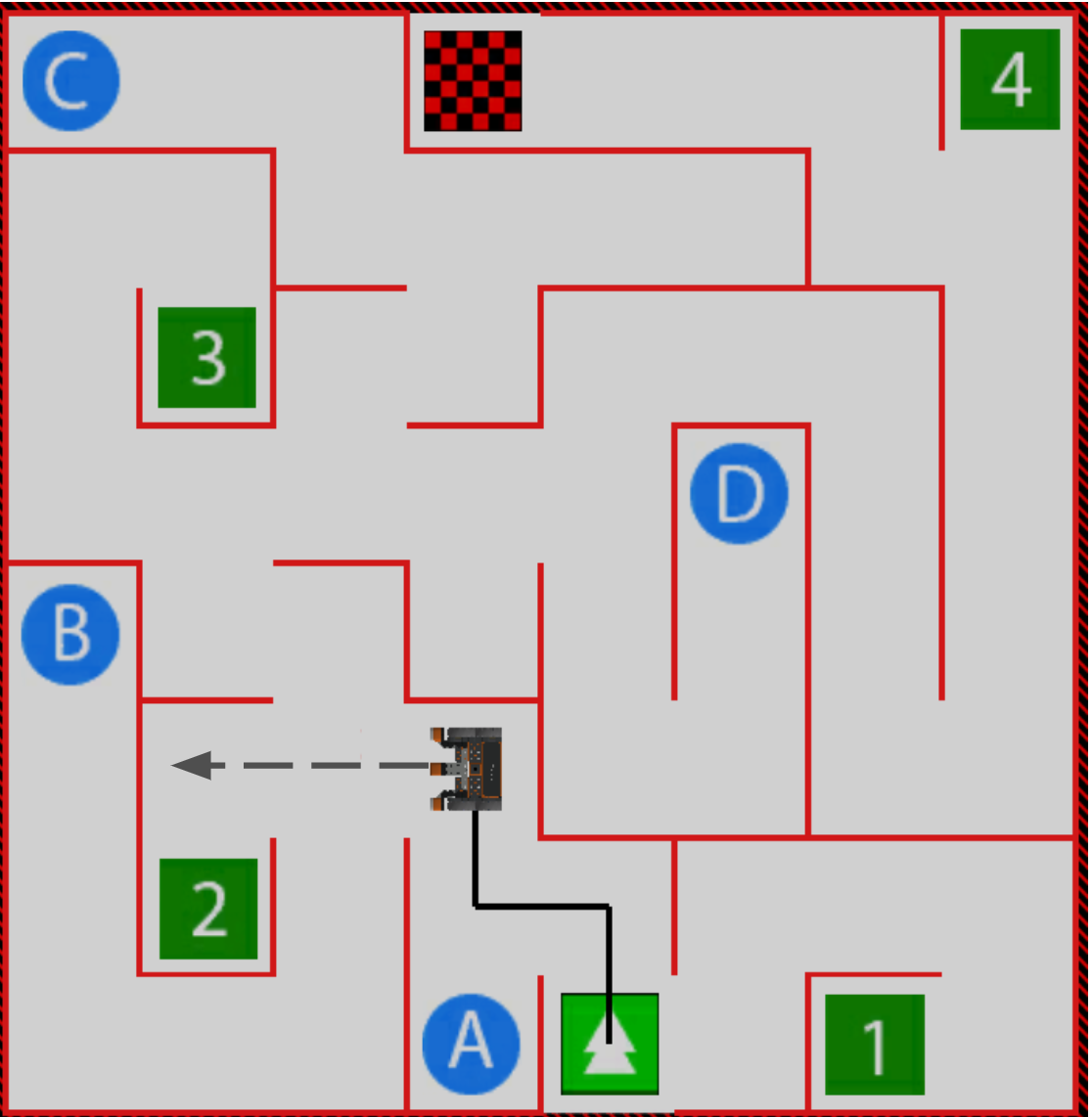
আমরা পূর্ববর্তী ইউনিটে বাম্পার সেন্সরের মতো ড্রাইভট্রেন কমান্ডগুলি উল্টে ব্যবহার করতে পারি, যাতে কাঙ্ক্ষিত টার্নিং পয়েন্টে পৌঁছানো যায়। এটি এই মত দেখতে পারে: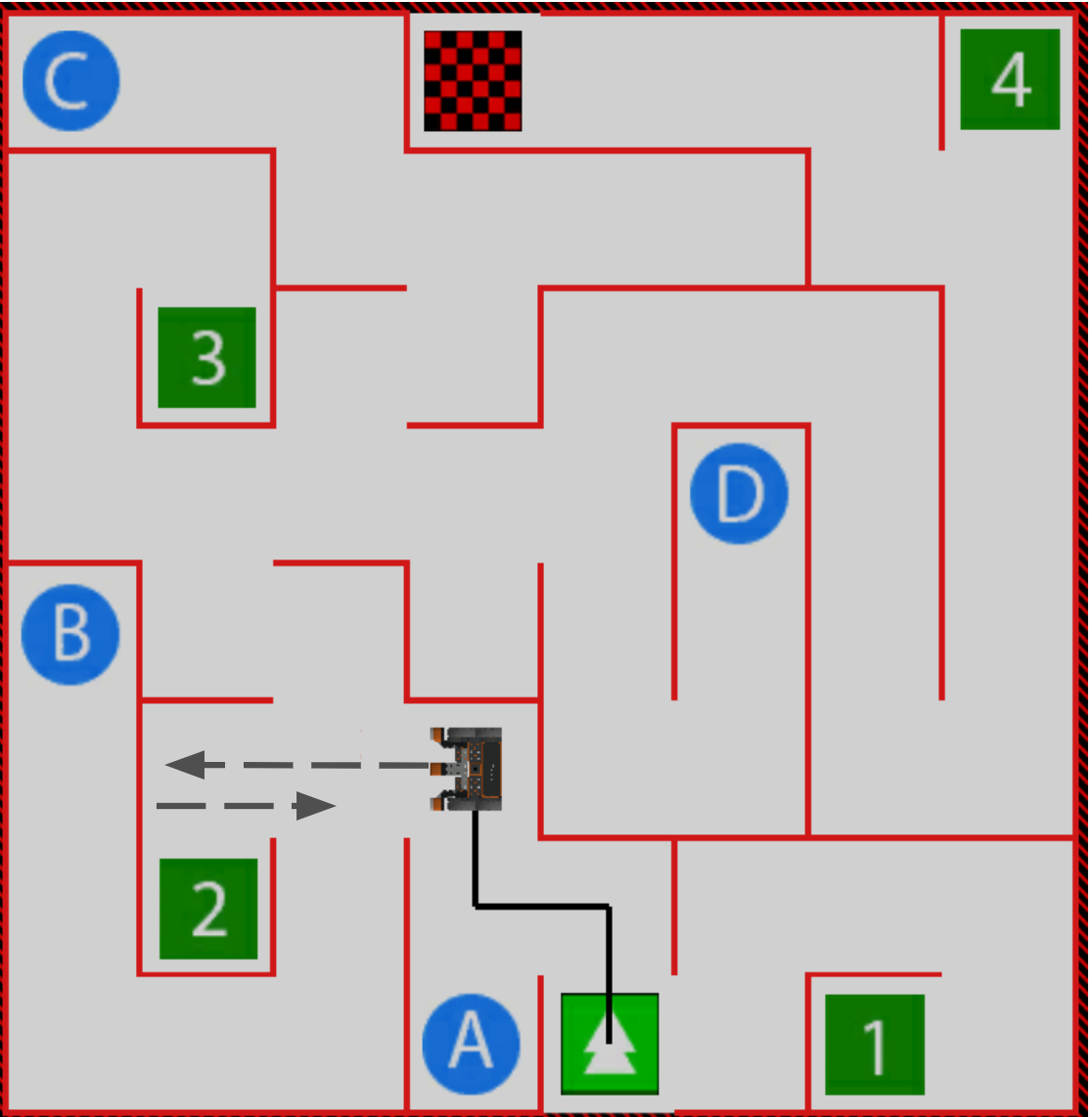
তবে, দূরত্ব সেন্সর ব্যবহার করে ভিআর রোবটটি দেয়াল থেকে যেকোনো দূরত্বে এ ঘুরতে পারে। এই মোড়ে, ভিআর রোবটটি অন্যান্য মোড়ের তুলনায় দেয়াল থেকে অনেক দূরে থাকে। আমরা তুলনা অপারেটরে দূরত্ব মান সামঞ্জস্য করতে পারি, ভিআর রোবটকে প্রাচীর থেকে আরও দূরত্বে ঘুরতে সক্ষম করতে, আমাদের প্রকল্প এবং ভিআর রোবটের পথকে আরও দক্ষ করে তুলতে পারি।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।