
Lezione 3: Regolazione delle distanze
Nella lezione precedente, hai utilizzato il sensore di distanza e gli operatori di confronto per il robot VR per guidare dall'inizio al numero "1" sul parco giochi del labirinto a parete. In questa lezione, imparerai come monitorare i valori dai sensori nel cruscotto e far guidare il robot VR dall'inizio alla lettera "B" sul parco giochi del labirinto a muro.

Risultati di apprendimento
- Identificare che il cruscotto può essere utilizzato per monitorare i dati dal sensore di distanza.
- Identificare come modificare i parametri in un progetto per utilizzare i dati del sensore di distanza per navigare il robot VR attraverso il parco giochi del labirinto a parete.
Guida alla lettera "B"
Ci sono diversi modi per navigare fino alla lettera "B" nel labirinto del muro. Per iniziare, diamo un'occhiata a quale sarebbe il percorso più diretto alla lettera "B". 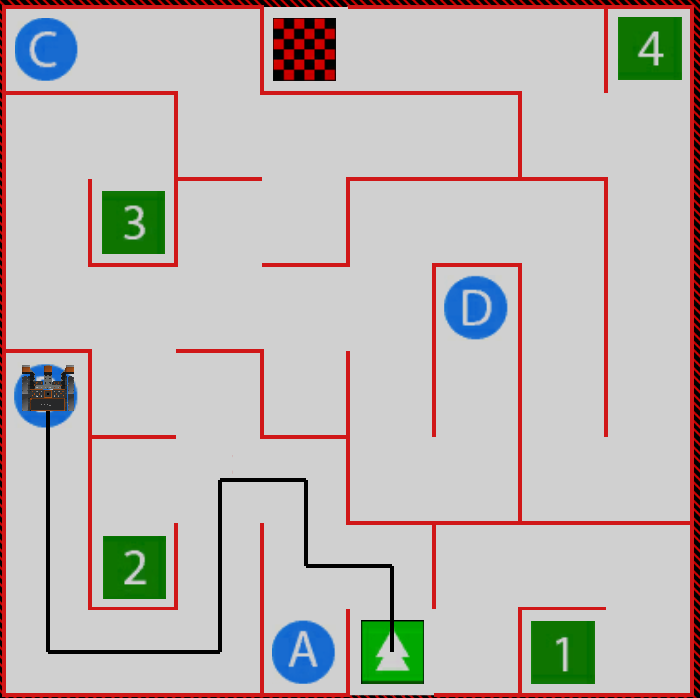
Inizia un nuovo progetto
- Avviare un nuovo progetto di testo e selezionare Wall Maze Playground quando richiesto.
- Denominare il progetto Unit5Lesson3.

Guida fino alla lettera "B"
-
Per cominciare, i primi movimenti del nostro Robot VR sono simili a quelli che abbiamo fatto nella lezione precedente. Costruisci il seguente progetto per iniziare il percorso:
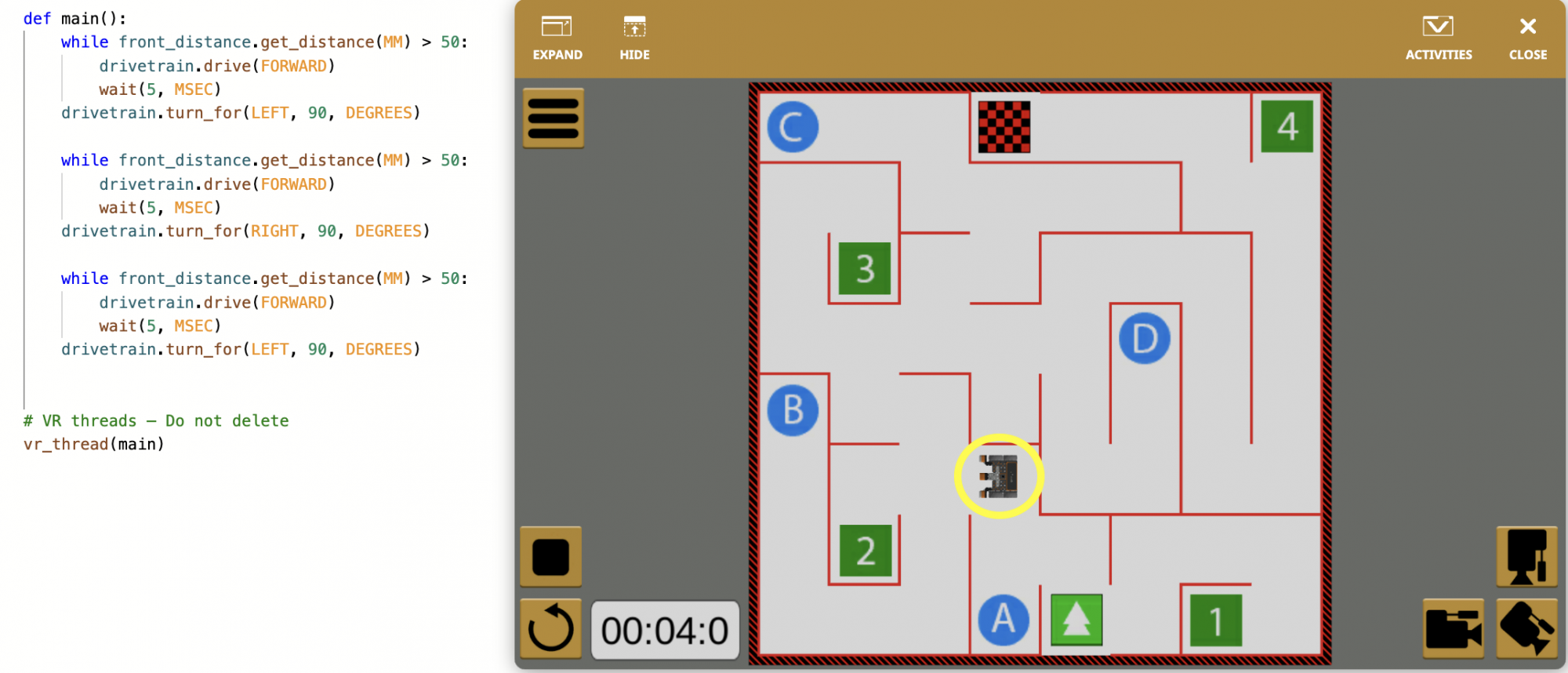
def main(): while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (RIGHT, 90, DEGREES) while front_distance.get_distance (MM) > 50: drivetrain.drive (FORWARD) wait(5, MSEC) drivetrain.turn_for (LEFT, 90, DEGREES) - Aprire la finestra del parco giochi se non è già aperta. Assicurati che il Wall Maze Playground si apra ed esegui il progetto.
- Nota dove si ferma il robot VR a questo punto del progetto. È rivolto a sinistra, la direzione corretta per continuare a guidare fino alla lettera "B".
Capire la posizione di tornitura desiderata
Il robot VR è ora rivolto nella direzione corretta per continuare nella parte successiva del percorso. Tuttavia, se usassimo lo stesso valore di distanza dal sensore di distanza per continuare, come abbiamo fatto nella lezione precedente, il robot VR seguirebbe questo percorso. 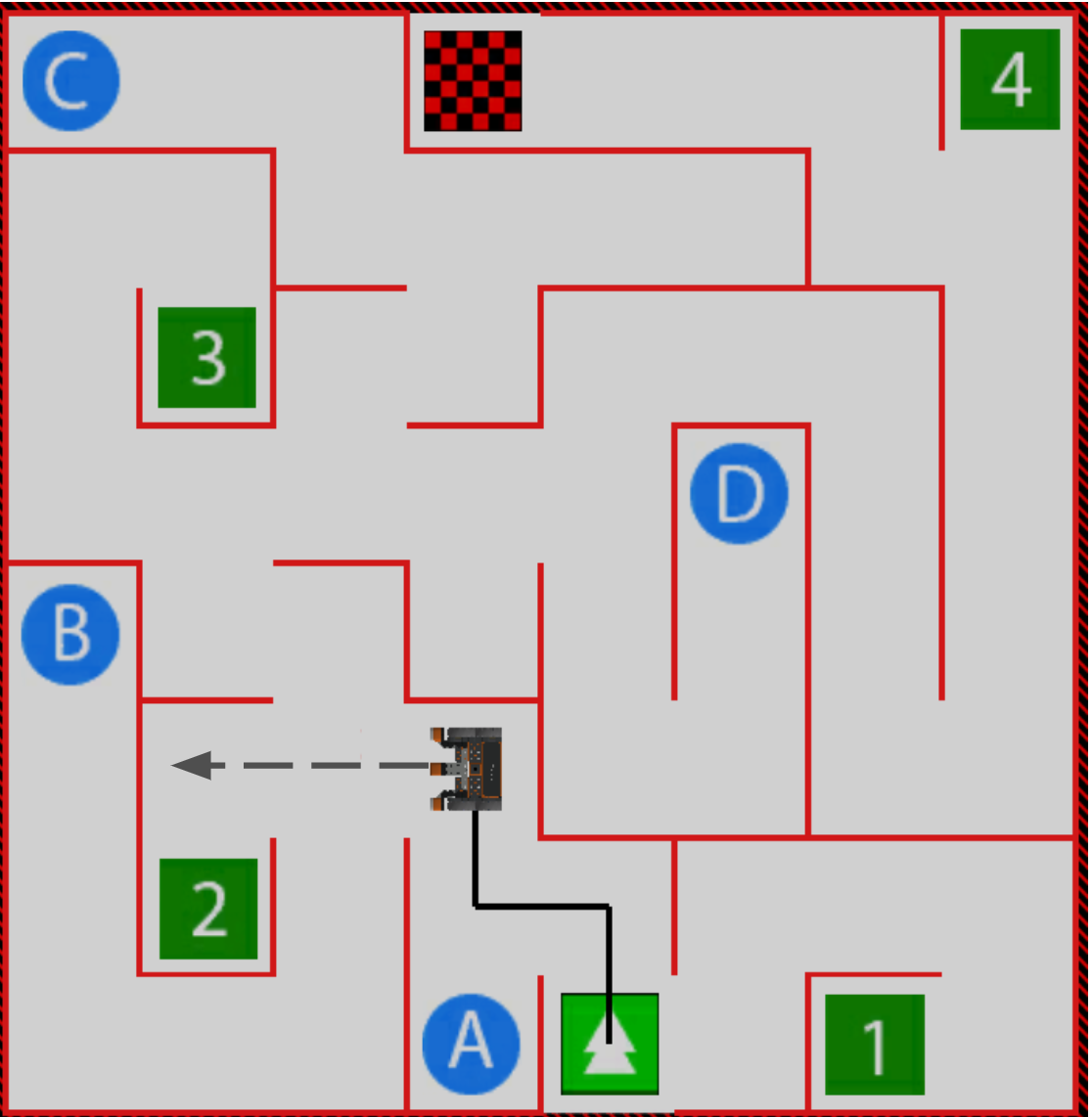
Potremmo invertire e utilizzare i comandi Drivetrain, come abbiamo fatto nell'unità precedente con il sensore paraurti, per raggiungere il punto di svolta desiderato. Potrebbe essere così: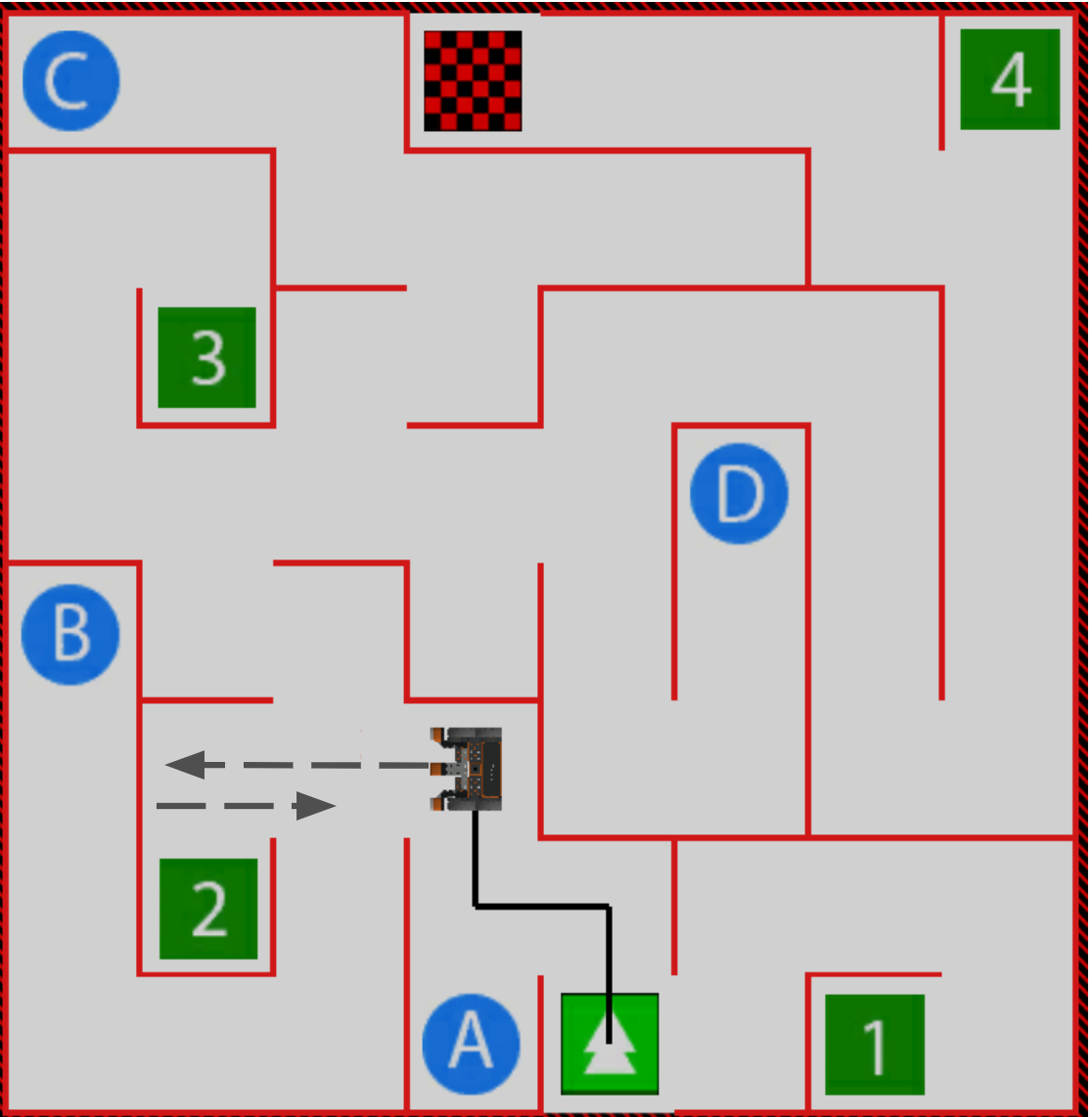
Tuttavia, il sensore di distanza può essere utilizzato per consentire al robot VR di girare a qualsiasi distanza da una parete. In questa curva, il robot VR è più lontano dalla parete rispetto alle altre curve. Possiamo regolare il valore della distanza nell'operatore di confronto, per consentire al Robot VR di girare a un'ulteriore distanza dalla parete, per rendere più efficiente il nostro progetto e il percorso del Robot VR.
Selezionare il pulsante Avanti per continuare con il resto della lezione.