
Lektion 3: Anpassen von Abständen
In der vorherigen Lektion haben Sie den Abstandssensor und die Vergleichsoperatoren für den VR-Roboter verwendet, um vom Start bis zur Nummer ‘1‘ auf dem Wall Maze Playground zu fahren. In dieser Lektion lernen Sie, wie Sie die Werte von Sensoren im Dashboard überwachen und den VR-Roboter vom Start bis zum Buchstaben "B" auf dem Wall Maze Playground fahrenlassen.

Lernergebnisse
- Stellen Sie fest, dass das Dashboard zur Überwachung der Daten des Abstandssensors verwendet werden kann.
- Identifizieren Sie, wie Sie Parameter in einem Projekt ändern können, um die Abstandssensordaten zu verwenden, um den VR-Roboter durch den Wandlabyrinth-Spielplatz zu navigieren.
Fahren zum Buchstaben 'B'
Es gibt mehrere Möglichkeiten, im Mauerlabyrinth zum Buchstaben „B“ zu navigieren. Schauen wir uns zunächst an, was der direkteste Weg zum Buchstaben „B“ wäre. 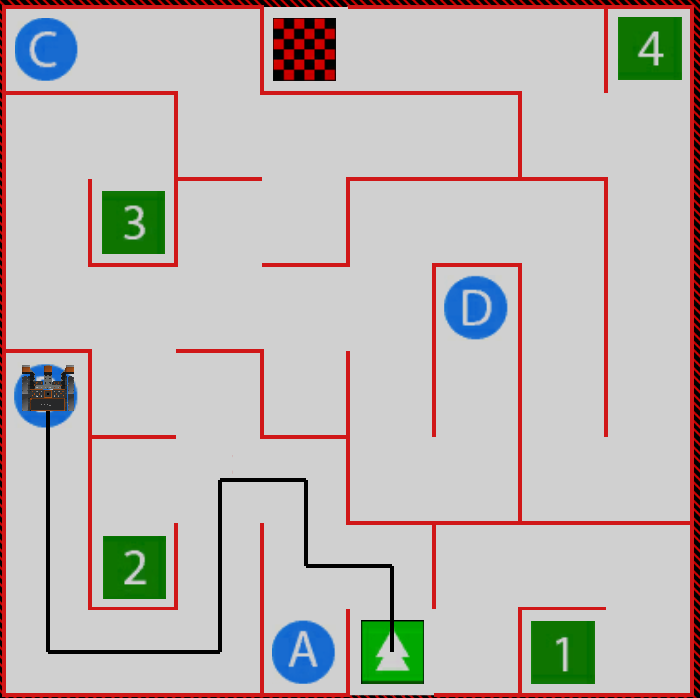
Neues Projekt starten
- Starten Sie ein neues Textprojekt und wählen Sie den Wall Maze Playground aus, wenn Sie dazu aufgefordert werden.
- Benennen Sie das Projekt Unit5Lesson3.

Fahren Sie zum Buchstaben ‘B’
-
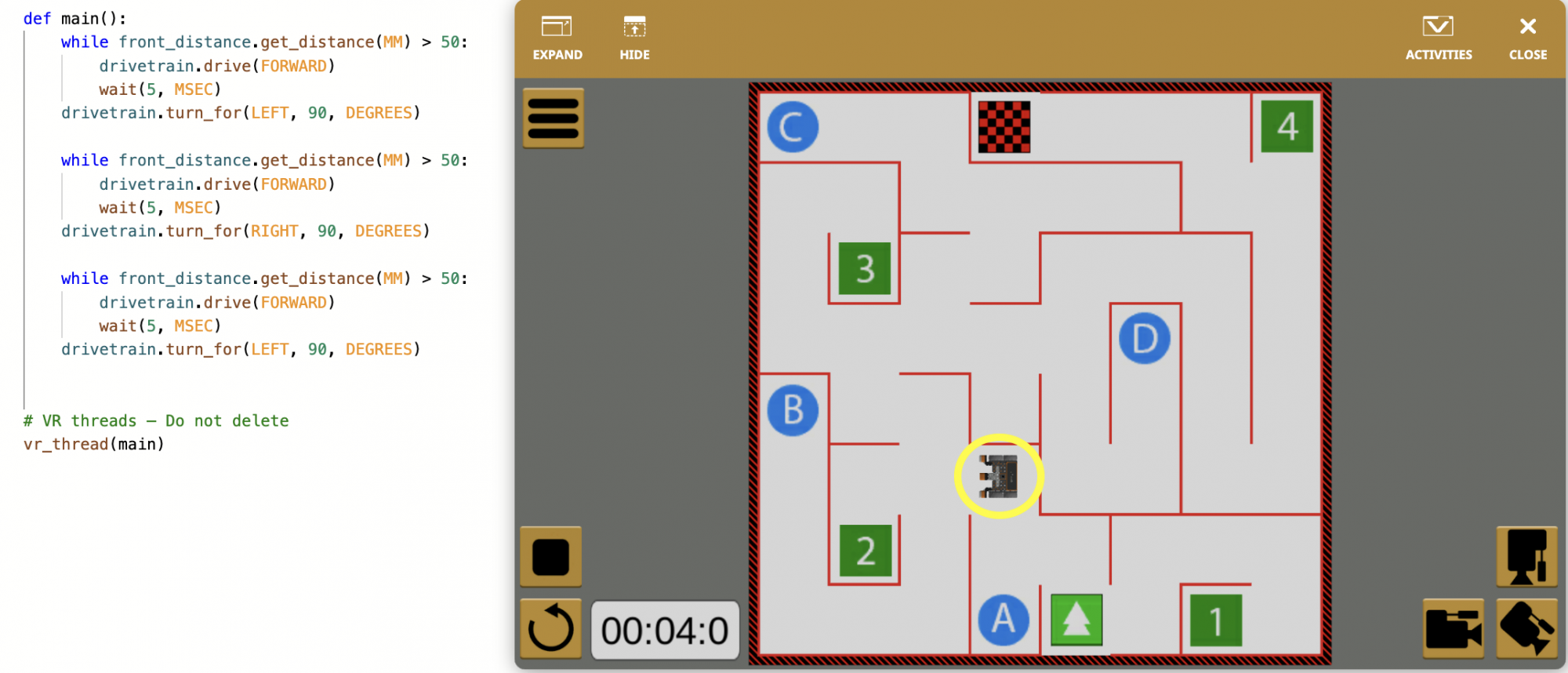
Zunächst einmal ähneln die ersten Bewegungen unseres VR-Roboters dem, was wir in der vorherigen Lektion gemacht haben. Erstellen Sie das folgende Projekt, um mit dem Pfad zu beginnen:
def main(): while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(RIGHT, 90, DEGREES) while front_distance.get_distance(MM) > 50: drivetrain.drive(FORWARD) wait(5, MSEC) drivetrain.turn_for(LEFT, 90, DEGREES) - Öffnen Sie das Playground-Fenster, wenn es noch nicht geöffnet ist. Stellen Sie sicher, dass sich der Wall Maze Playground öffnet, und führen Sie das Projekt aus.
- Beachten Sie, wo der VR-Roboter an dieser Stelle im Projekt anhält. Sie zeigt nach links, in die richtige Richtung, um zum Buchstaben 'B' weiterzufahren.
Ermittlung des gewünschten Abbiegeortes
Der VR-Roboter zeigt nun in die richtige Richtung, um zum nächsten Teil des Weges zu gelangen. Wenn wir jedoch den gleichen Abstandswert vom Abstandssensor verwenden würden, um fortzufahren, wie wir es in der vorherigen Lektion getan haben, würde der VR-Roboter diesem Pfad folgen. 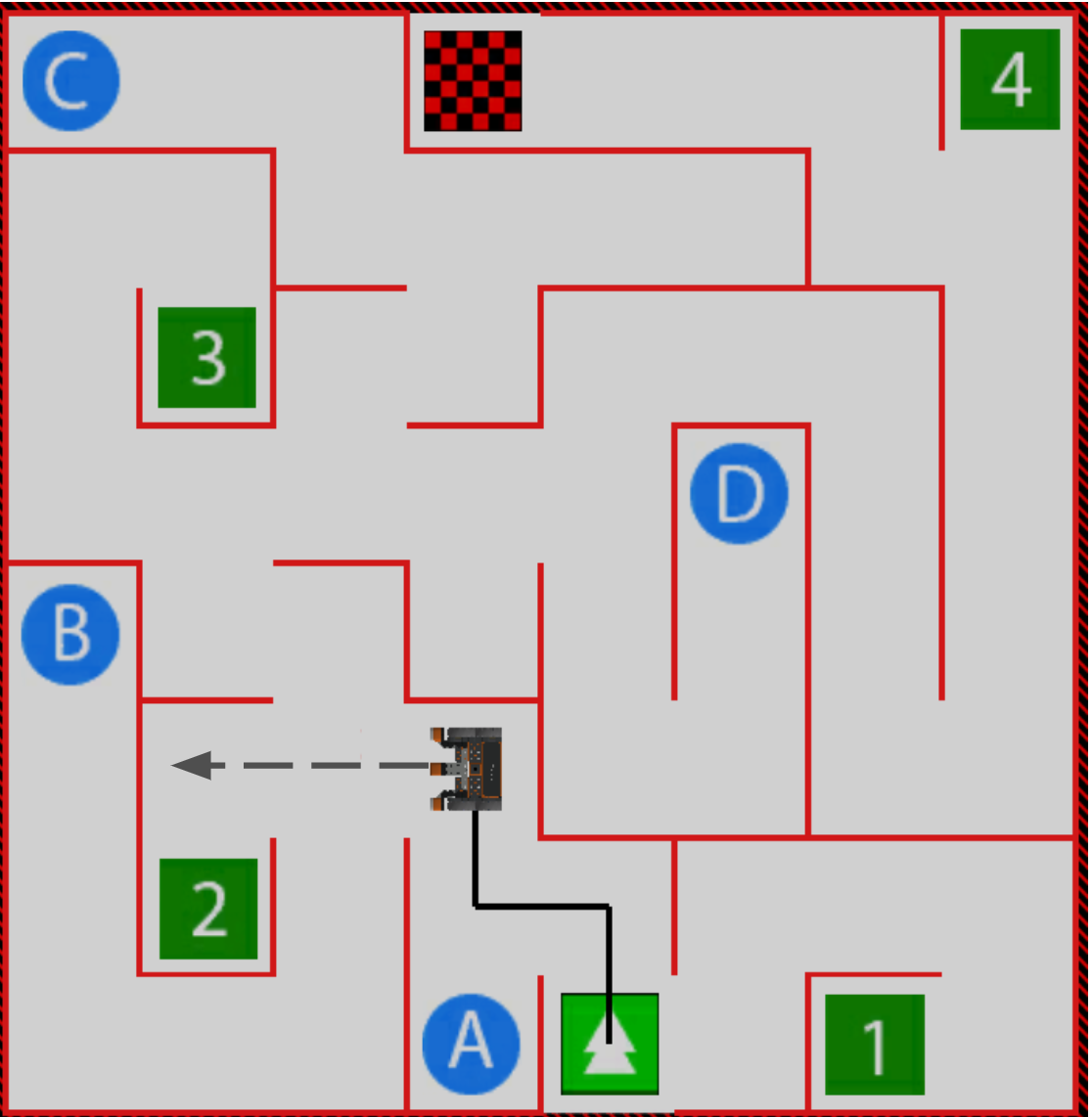
Wir könnten rückwärts fahren und die Befehle des Antriebsstrangs verwenden, wie wir es in der vorherigen Einheit mit dem Stoßstangensensor getan haben, um den gewünschten Wendepunkt zu erreichen. Das könnte so aussehen: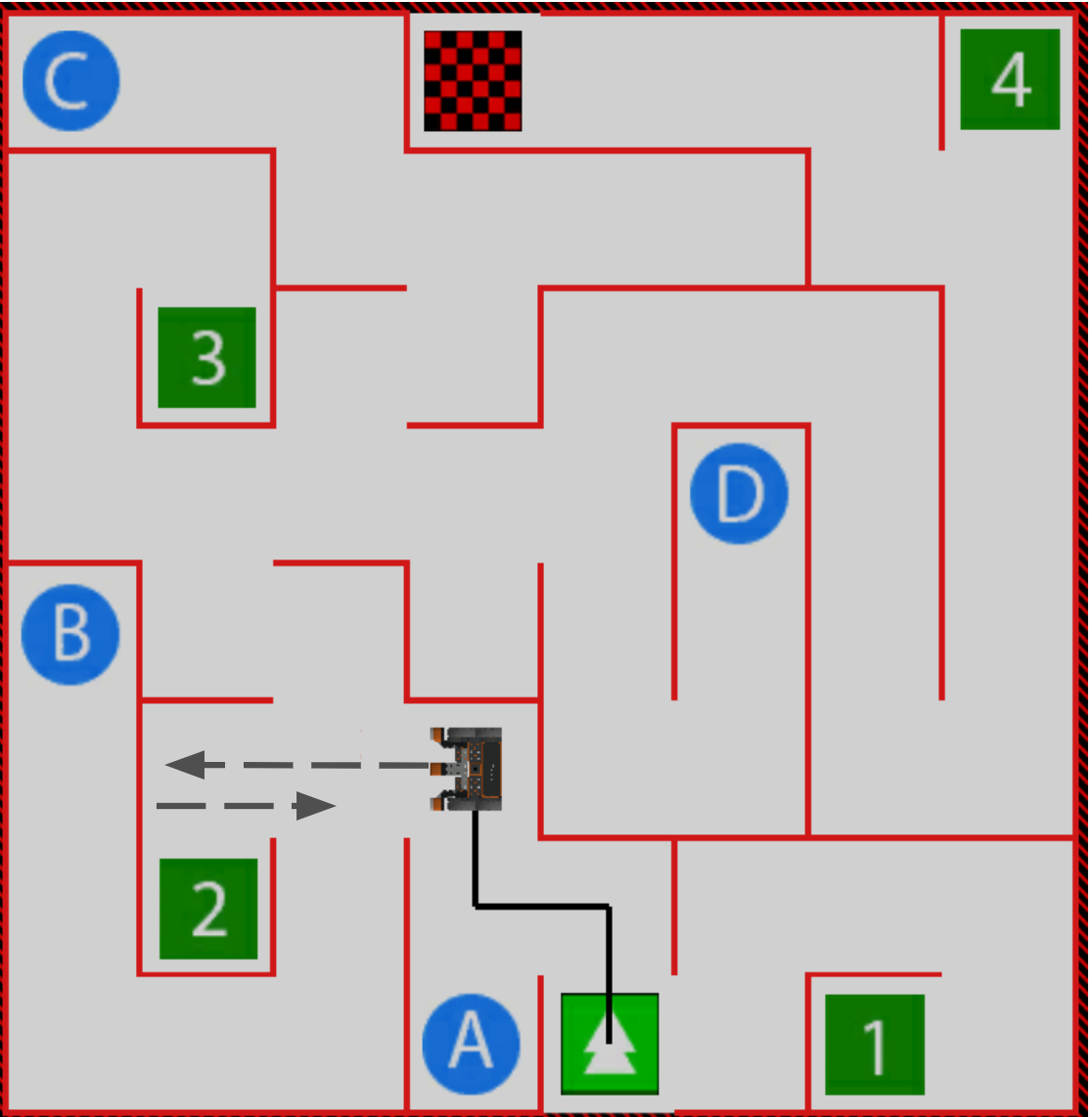
Der Abstandssensor kann jedoch verwendet werden, damit der VR-Roboter in beliebiger Entfernung von einer Wand abbiegen kann. In dieser Kurve ist der VR-Roboter weiter von der Wand entfernt als andere Kurven. Wir können den Abstandswert im Vergleichsoperator anpassen, damit sich der VR-Roboter in einem weiteren Abstand von der Wand drehen kann, um unser Projekt und den Weg des VR-Roboters effizienter zu gestalten.
Wählen Sie die Schaltfläche Weiter um mit dem Rest dieser Lektion fortzufahren.