
المقدمة
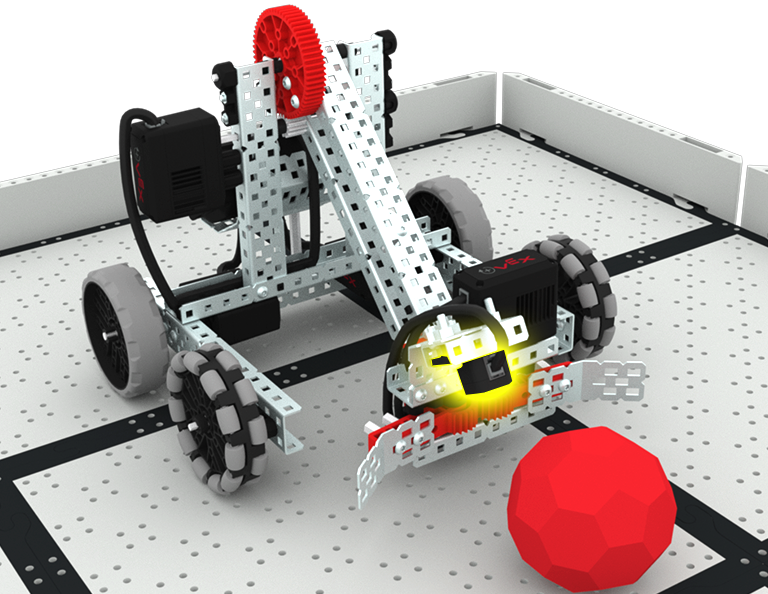
ستتعرف في هذا الدرس على المستشعر البصري، وكيف يمكن استخدامه مع كتل [If then] و [Repeat] في مشروع لجعل Clawbot يجمع Buckyball بناءً على لونه. ثم ستطبق ما تعلمته للتنافس في تحدي محرك الكنز، حيث سيحتاج الروبوت الخاص بك إلى جمع كرة الكنز الحمراء فقط. شاهد الرسوم المتحركة أدناه لمشاهدة مثال على كيفية تحرك الروبوت بشكل مستقل أثناء التشغيل الناجح في Treasure Mover Challenge.
إضافة مستشعر بصري
في هذا الدرس، ستتعرف على ملاحظات المستشعر وكيف يمكنك ترميز الروبوت الخاص بك باستخدام هذه الملاحظات.
أضف مستشعرًا بصريًا إلى Clawbot كما هو موضح في هذه الصورة.
- قم بتوصيل قناة C 1x2x1x4 بمستشعر بصري.
- قم بتركيب القناة C على مجمعة بزاوية، ثم قم بتوصيلها بالمخلب.
حدد التالي > للتعرف على المستشعر البصري والكتل التي يمكنك استخدامها لبناء مشروع لجمع كرة بوكي حمراء.