
ভূমিকা
এই পাঠে আপনি অপটিক্যাল সেন্সর সম্পর্কে শিখবেন, এবং কীভাবে এটি [যদি তারপর] এবং [পুনরাবৃত্তি] ব্লকের সাথে একটি প্রকল্পে ব্যবহার করা যেতে পারে যাতে আপনার ক্লাবট তার রঙের উপর ভিত্তি করে একটি বাকিবল সংগ্রহ করতে পারে। তারপর তুমি যা শিখেছো তা ট্রেজার মুভার চ্যালেঞ্জে প্রতিযোগিতা করার জন্য প্রয়োগ করবে, যেখানে তোমার রোবটকে শুধুমাত্র লাল ট্রেজার বাকিবল সংগ্রহ করতে হবে। ট্রেজার মুভার চ্যালেঞ্জে সফলভাবে দৌড়ানোর সময় একটি রোবট কীভাবে স্বায়ত্তশাসিতভাবে চলাচল করতে পারে তার একটি উদাহরণ দেখতে নীচের অ্যানিমেশনটি দেখুন।
এই অ্যানিমেশনে, ক্লবটটি মাঠের বাম দেয়াল বরাবর শুরু হয়। রোবটের বাম দিকে, প্রতিটি কালো রেখায়, দেয়ালের বিপরীতে দুটি বাকিবল রাখা আছে। দ্বিতীয় বাকিবলটি লাল। রোবটটি বারবার কালো রেখার দিকে এগিয়ে যায়, বাম দিকে মোড় নেয় এবং প্রতিটি বাকিবলের রঙ সনাক্ত করার জন্য এগিয়ে যায়। যদি বাকিবল লাল না হয়, তাহলে রোবটটি উল্টে যায়, ডানদিকে ঘুরবে এবং তার ধরণ অব্যাহত রাখবে। যদি বাকিবলটি লাল হয়, তাহলে রোবটটি এটিকে তার নখর দিয়ে ধরে, উল্টে, ঘুরে, এবং বাকিবলটিকে বিপরীত দেয়ালে পৌঁছে দেওয়ার জন্য গাড়ি চালায়। টাইমারটি চলে যতক্ষণ না রোবটটি পাঁচটি বাকিবলের রঙ পরীক্ষা করে, প্রায় ২৮ সেকেন্ড।
একটি অপটিক্যাল সেন্সর যোগ করুন
এই পাঠে, আপনি সেন্সর প্রতিক্রিয়া সম্পর্কে শিখবেন এবং সেই প্রতিক্রিয়া ব্যবহার করে আপনি কীভাবে আপনার রোবটকে কোড করতে পারেন।
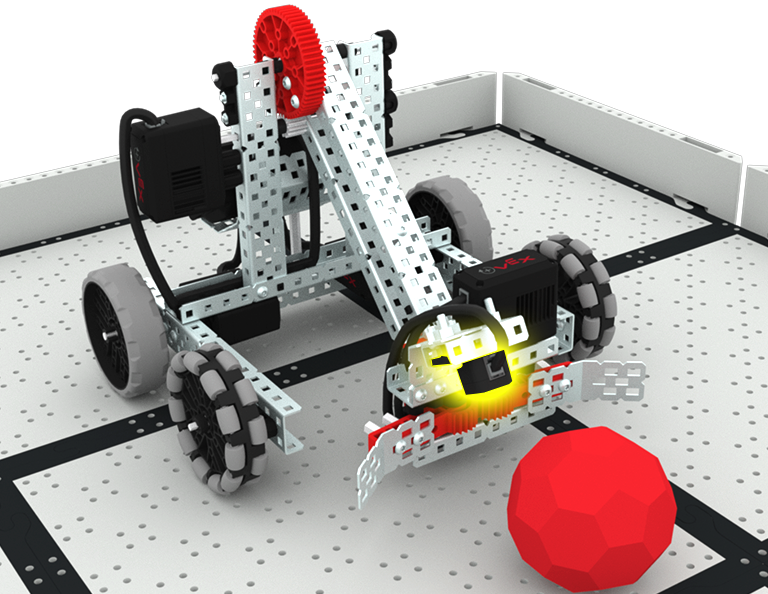
এই ছবিতে দেখানো হিসাবে আপনার Clawbot-এ একটি অপটিক্যাল সেন্সর যুক্ত করুন।
- একটি অপটিক্যাল সেন্সরের সাথে ১x২x১x৪ সি-চ্যানেল সংযুক্ত করুন।
- সি-চ্যানেলটি একটি কোণযুক্ত গাসেটে মাউন্ট করুন, তারপর এটি নখর সাথে সংযুক্ত করুন।
অপটিক্যাল সেন্সর এবং লাল বাকিবল সংগ্রহের জন্য একটি প্রকল্প তৈরি করতে আপনি যে ব্লকগুলি ব্যবহার করতে পারেন সে সম্পর্কে জানতেপরবর্তী >নির্বাচন করুন।