
giriiş
Bu Derste Optik Sensörü ve [If then] ve [Repeat] bloklarıyla birlikte bir projede Clawbot'unuzun rengine göre bir Buckyball toplamasını nasıl sağlayabileceğinizi öğreneceksiniz. Daha sonra öğrendiklerinizi Hazine Taşıyıcısı Mücadelesi'nde yarışmak için uygulayacaksınız. Bu mücadelede robotunuzun sadece kırmızı Hazine Buckyball'unu toplaması gerekecek. Hazine Taşıyıcısı Mücadelesi'nde başarılı bir koşu sırasında bir robotun otonom olarak nasıl hareket edebileceğine dair bir örnek görmek için aşağıdaki animasyonu izleyin.
Bu animasyonda, Pençe Robotu Saha'nın sol duvarı boyunca ilerlemeye başlar. Robotun solundaki duvara, her siyah çizginin üzerine iki adet Buckyball yerleştirilmiştir. İkinci Buckyball kırmızıdır. Robot tekrar tekrar siyah çizgiye doğru ilerliyor, sola dönüyor ve her Buckyball'un rengini algılamak için ileri doğru ilerliyor. Eğer Buckyball kırmızı değilse robot geri gider, sağa döner ve desenine devam eder. Eğer Buckyball kırmızı ise, robot onu pençesiyle kavrar, geri geri gider, döner ve Buckyball'u karşı duvara fırlatmak için hareket eder. Robot beş Buckyball'un rengini kontrol edene kadar zamanlayıcı yaklaşık 28 saniye çalışır.
Optik Sensör Ekle
Bu Ders'te sensör geri bildirimini ve bu geri bildirimi kullanarak robotunuzu nasıl kodlayabileceğinizi öğreneceksiniz.
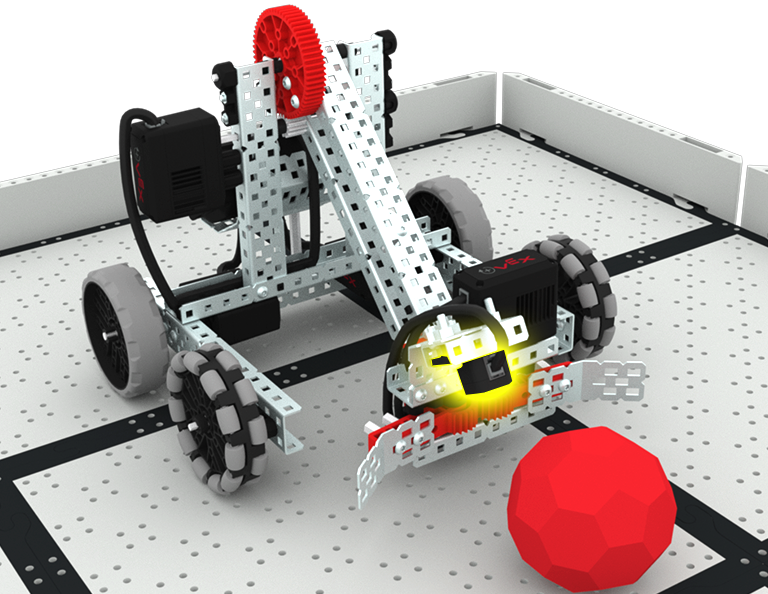
Bu görselde gösterildiği gibi Clawbot'unuza bir Optik Sensör ekleyin.
- Optik Sensöre 1x2x1x4 C-Kanalı bağlayın.
- C-Kanalını açılı bir köşebente monte edin, ardından bunu pençeye takın.
Optik Sensör ve kırmızı Buckyball toplamak için kullanabileceğiniz bloklar hakkında bilgi edinmek içinSonraki >seçin.