
Giới thiệu
Trong Bài học này, bạn sẽ tìm hiểu về Cảm biến quang học và cách sử dụng nó với các khối [Nếu thì] và [Lặp lại] trong một dự án để khiến Clawbot của bạn thu thập Buckyball dựa trên màu sắc của nó. Sau đó, bạn sẽ áp dụng những gì đã học để tham gia Thử thách di chuyển kho báu, trong đó robot của bạn chỉ cần thu thập Buckyball kho báu màu đỏ. Xem hình ảnh động bên dưới để biết ví dụ về cách một robot có thể di chuyển tự động trong một lần chạy thành công trong Thử thách di chuyển kho báu.
Trong hình ảnh động này, Clawbot bắt đầu dọc theo bức tường bên trái của Sân chơi. Có hai Buckyball được đặt dựa vào tường bên trái của robot, tại mỗi đường màu đen. Buckyball thứ hai có màu đỏ. Robot liên tục tiến về phía vạch đen, rẽ trái và tiến về phía trước để phát hiện màu sắc của từng Buckyball. Nếu Buckyball không phải màu đỏ, robot sẽ đảo ngược, rẽ phải và tiếp tục hành trình của mình. Nếu Buckyball có màu đỏ, robot sẽ dùng càng giữ nó, lùi lại, quay lại và lái để đưa Buckyball đến bức tường đối diện. Bộ đếm thời gian sẽ chạy cho đến khi robot kiểm tra xong màu sắc của cả năm quả Buckyball, khoảng 28 giây.
Thêm cảm biến quang học
Trong Bài học này, bạn sẽ tìm hiểu về phản hồi của cảm biến và cách lập trình robot bằng phản hồi đó.
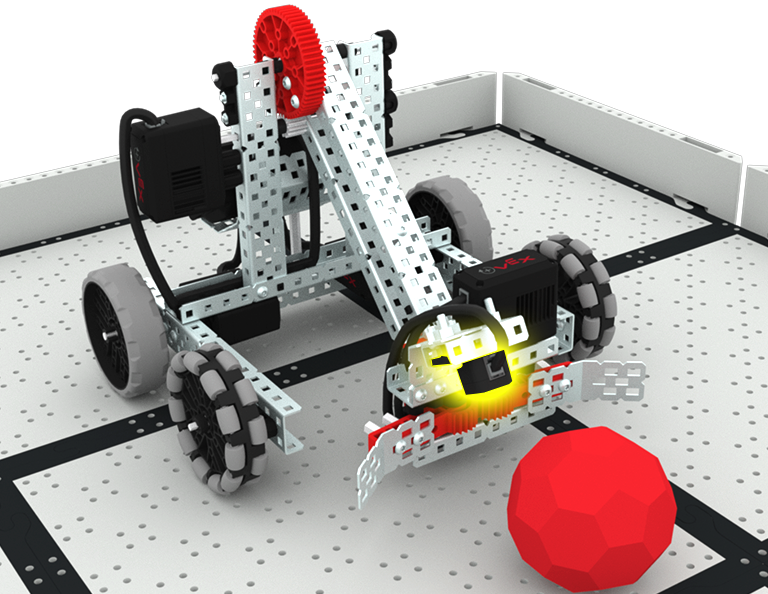
Thêm cảm biến quang học vào Clawbot như trong hình minh họa này.
- Kết nối kênh C 1x2x1x4 với cảm biến quang học.
- Lắp kênh C vào một miếng ghép góc cạnh, sau đó gắn miếng ghép này vào móng vuốt.
ChọnTiếp theo >để tìm hiểu về Cảm biến quang học và các khối bạn có thể sử dụng để xây dựng dự án thu thập Buckyball màu đỏ.