
Introducción
En esta lección aprenderá sobre el sensor óptico y cómo se puede usar con los bloques [Si entonces] y [Repetir] en un proyecto para hacer que su Clawbot recolecte una Buckyball según su color. Luego aplicarás lo aprendido para competir en el Treasure Mover Challenge, donde tu robot necesitará recolectar únicamente la Buckyball roja del tesoro. Mira la animación a continuación para ver un ejemplo de cómo un robot podría moverse de forma autónoma durante una carrera exitosa en el desafío Treasure Mover.
En esta animación, el Clawbot comienza a lo largo de la pared izquierda del campo. Hay dos Buckyballs colocados contra la pared a la izquierda del robot, en cada línea negra. El segundo Buckyball es rojo. El robot avanza repetidamente hasta la línea negra, gira a la izquierda y avanza para detectar el color de cada Buckyball. Si la Buckyball no es roja, el robot retrocede, gira a la derecha y continúa su patrón. Si la Buckyball es roja, el robot la agarra con su garra, da marcha atrás, da un giro y se dirige hacia la pared opuesta para lanzar la Buckyball hacia ella. El cronómetro corre hasta que el robot haya comprobado el color de las cinco Buckyballs, aproximadamente 28 segundos.
Agregar un sensor óptico
En esta lección, aprenderá sobre la retroalimentación del sensor y cómo puede codificar su robot usando esa retroalimentación.
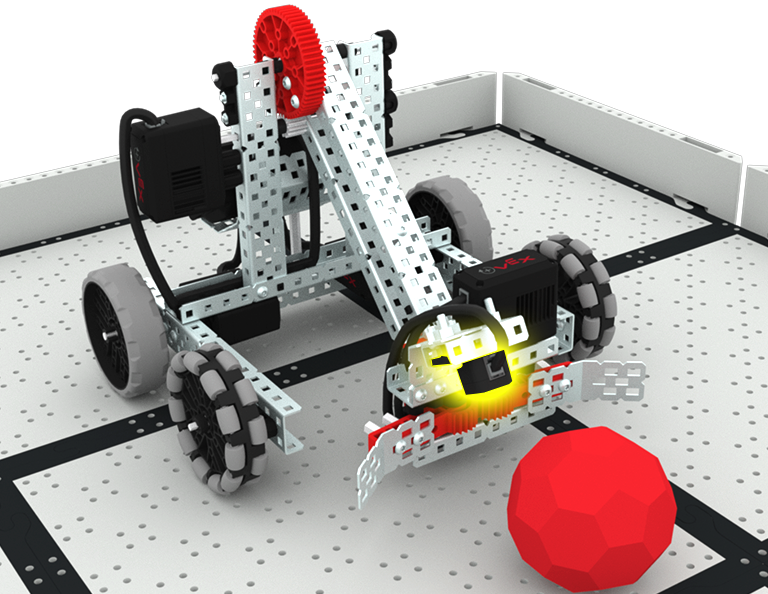
Agregue un sensor óptico a su Clawbot como se muestra en esta imagen.
- Conecte un canal C de 1x2x1x4 a un sensor óptico.
- Monte el canal C en un refuerzo en ángulo y luego fíjelo a la garra.
Selecciona Siguiente > para obtener más información sobre el sensor óptico y los bloques que puedes usar para construir un proyecto para recolectar un Buckyball rojo.