
소개
이 수업에서는 광학 센서에 대해 알아보고, 프로젝트에서 [If then] 및 [Repeat] 블록과 함께 사용하여 클로봇이 색상에 따라 버키볼을 수집하도록 하는 방법을 알아봅니다. 그런 다음, 배운 내용을 적용하여 Treasure Mover Challenge에 참가하게 되는데, 로봇은 빨간색 Treasure Buckyball만 모아야 합니다. 아래 애니메이션을 시청하여 Treasure Mover Challenge에서 로봇이 성공적으로 움직이는 모습을 보여주세요.
이 애니메이션에서 클로봇은 필드의 왼쪽 벽을 따라 출발합니다. 로봇 왼쪽 벽에는 검은색 선마다 버키볼이 두 개씩 놓여 있습니다. 두 번째 버키볼은 빨간색입니다. 로봇은 반복적으로 검은색 선을 향해 전진하고, 왼쪽으로 돌고, 다시 전진하여 각 버키볼의 색상을 감지합니다. 버키볼이 빨간색이 아니면 로봇은 후진하여 오른쪽으로 돌아 원래 패턴을 계속합니다. 버키볼이 빨간색이면 로봇은 발톱으로 버키볼을 움켜쥐고 후진하여 돌아서 반대쪽 벽으로 버키볼을 던집니다. 타이머는 로봇이 버키볼 5개의 색상을 모두 확인할 때까지 약 28초 동안 작동합니다.
광학 센서 추가
이 수업에서는 센서 피드백에 대해 알아보고, 그 피드백을 활용하여 로봇을 코딩하는 방법을 알아봅니다.
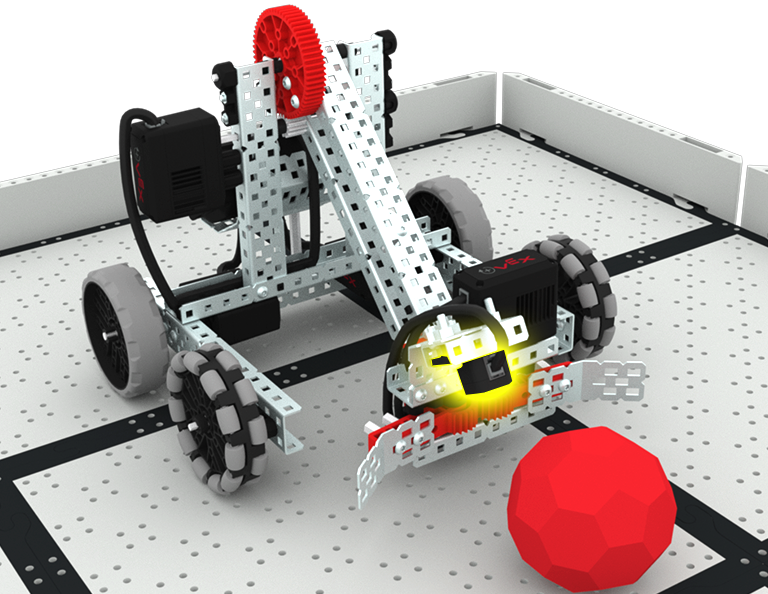
이 이미지에 표시된 대로 Clawbot에 광학 센서를 추가하세요.
- 1x2x1x4 C채널을 광학 센서에 연결합니다.
- C-채널을 각진 거셋에 장착한 다음, 이것을 클로에 부착합니다.
다음 >선택하여 광학 센서와 빨간 버키볼을 모으는 프로젝트를 만드는 데 사용할 수 있는 블록에 대해 알아보세요.