
Introdução
Nesta Lição, você aprenderá sobre o Sensor Óptico e como ele pode ser usado com os blocos [If then] e [Repeat] em um projeto para fazer com que o seu Clawbot colete uma Buckyball com base na sua cor. Em seguida, você aplicará o que aprendeu para competir no Treasure Mover Challenge, onde o seu robô precisará coletar apenas o Buckyball Treasure vermelho. Assista à animação abaixo para ver um exemplo de como um robô pode se mover autonomamente durante uma corrida bem-sucedida no Treasure Mover Challenge.
Adicionar um sensor óptico
Nesta lição, você aprende sobre o feedback do sensor e como codificar seu robô usando esse feedback.
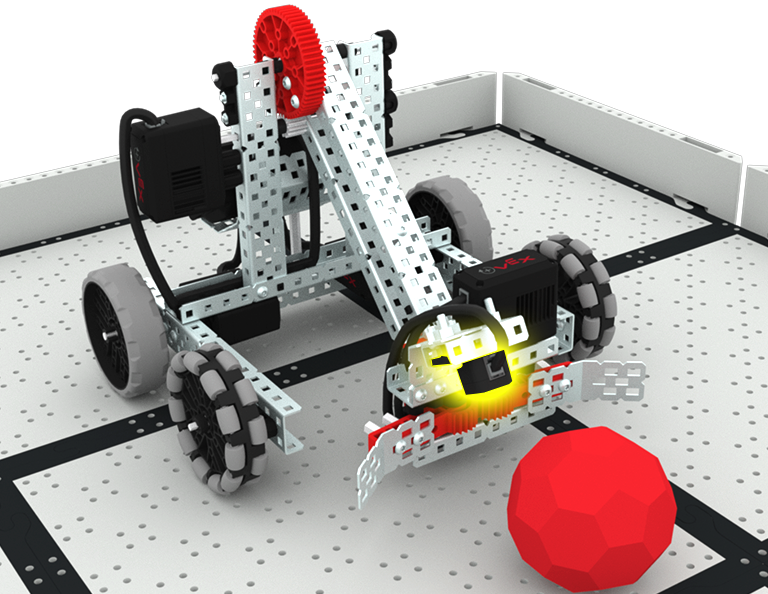
Adicione um sensor óptico ao seu Clawbot, conforme mostrado nesta imagem.
- Conecte um canal C 1x2x1x4 a um sensor óptico.
- Monte o canal C em um reforço angular e, em seguida, prenda-o à garra.
Selecione Avançar > para saber mais sobre o Sensor Óptico e os blocos que pode usar para construir um projeto para recolher uma Buckyball vermelha.