পাঠ ১: বাম্পার সেন্সর কী?
এই পাঠে, আপনি শিখবেন সেন্সর কী এবং কেন আপনি ভিআর রোবটের সাথে সেন্সর ব্যবহার করবেন। আপনি প্রথম যে সেন্সরটি সম্পর্কে জানবেন তা হল বাম্পার সেন্সর। আপনি শিখবেন কিভাবে বাম্পার সেন্সর কাজ করে এবং কিভাবে VEXcode VR প্রকল্পে VR রোবট বাম্পার সেন্সর ব্যবহার করতে হয়।
শেখার ফলাফল
- বাম্পার সেন্সর এক ধরণের সুইচ তা চিহ্নিত করুন।
- বাম্পার সেন্সরটি FALSE (মুক্ত) অথবা TRUE (চাপা) এর মান রিপোর্ট করে কিনা তা সনাক্ত করুন।
- বাম্পার সেন্সর চাপলে বা ছেড়ে দিলে VR রোবট অ্যাকশন ঘটাতে পারে কিনা তা শনাক্ত করুন।
- শনাক্ত করুন যে <Pressing bumper> ব্লকটি একটি বুলিয়ান যা বাম্পার সেন্সর চাপলে রিপোর্ট করে।
- VEXcode VR প্রকল্পে বাম্পার সেন্সর কেন ব্যবহার করা হবে তা বর্ণনা করুন।
বাম্পার সেন্সর
ভিআর রোবটটির সামনের দিকে দুটি বাম্পার সেন্সর রয়েছে।
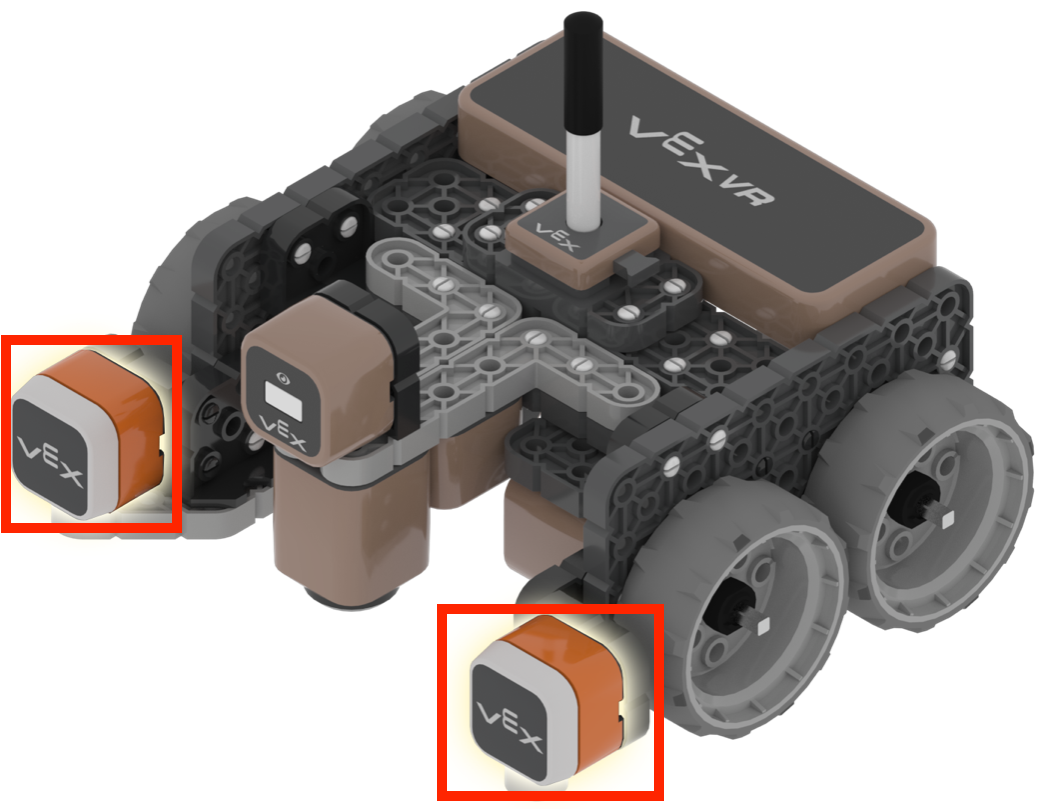
একটি বাম্পার সেন্সর হল একটি সুইচ যা চাপলে বা ছেড়ে দিলে রিপোর্ট করে।
- বাম্পার সেন্সর টিপলে বাম্পার সেন্সরটি সত্যের একটি সেন্সর মান রিপোর্ট করবে।
- যখন বাম্পার সেন্সর রিলিজ হয় তখন বাম্পার সেন্সর একটি সেন্সর মান FALSE রিপোর্ট করবে।
বাম্পার সেন্সরটি ওয়াল মেজ খেলার মাঠএর দেয়ালে বা অন্যান্য খেলার মাঠের চারপাশের বাইরের দেয়াল দ্বারা চাপা হয়।

VR রোবট কোনো বস্তু বা দেয়ালে স্পর্শ করছে কিনা তা নির্ধারণ করতে বাম্পার সেন্সর ব্যবহার করা হয়। বাম্পার সেন্সরের অবস্থা পরীক্ষা করতে একটি VEXcode VR প্রকল্পে <Pressing bumper> ব্লক ব্যবহার করুন।
বাম্পার সেন্সর কীভাবে কাজ করে সে সম্পর্কে বিস্তারিত তথ্যের জন্য বাম্পার সেন্সর - রোবট বৈশিষ্ট্য - VEX VRনিবন্ধটি পড়ুন।
<Pressing bumper> ব্লক
<Pressing bumper> একটি বুলিয়ান রিপোর্টার ব্লক। বাম্পার টিপলে এটি TRUE রিপোর্ট করে এবং এটি না চাপলে FALSE রিপোর্ট করে।

সুইচ ব্লক ব্যবহার করা
এটি সুইচ <Bumper pressed> ব্লক।

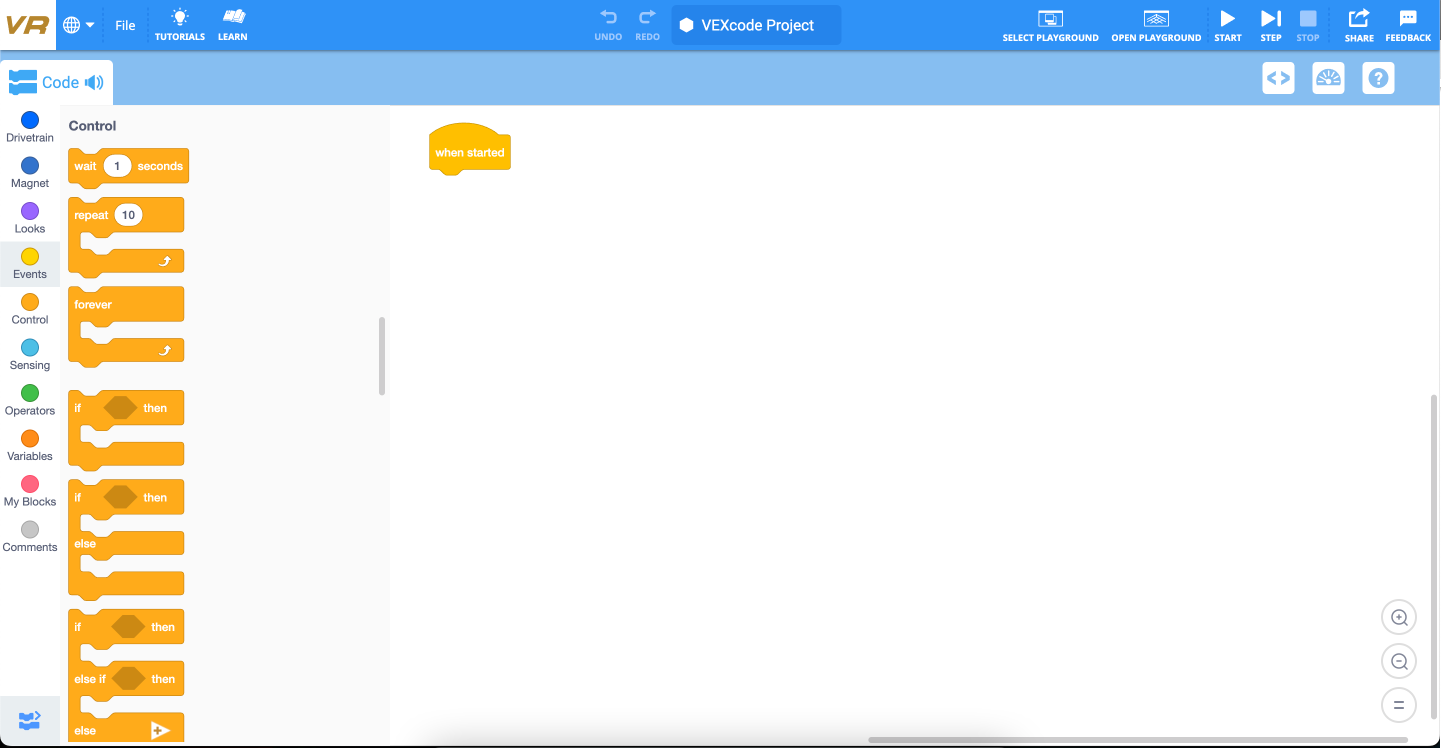
<Pressing bumper> ব্লকটি কন্ট্রোল বিভাগের ব্লকগুলির সাথে ব্যবহৃত হয় যা ষড়ভুজাকার বুলিয়ান ব্লক গ্রহণ করে।
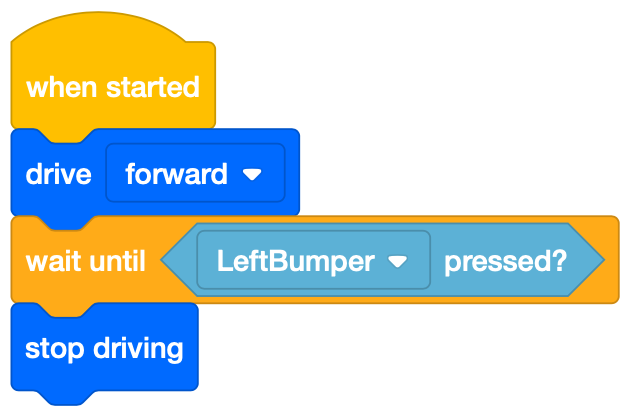
নিম্নলিখিত উদাহরণে, VR রোবটটি বাম বাম্পার টিপে না ফেলা পর্যন্ত এগিয়ে যাবে। বাম বাম্পার টিপলে, ভিআর রোবটটি গাড়ি চালানো বন্ধ করে দেবে।
আবেদন করুন
রোবোটিক্সের জন্য সেন্সর অপরিহার্য। একটি VR রোবটকে সত্যিকার অর্থে একটি রোবট হিসাবে বিবেচনা করার জন্য, এটি অবশ্যই তার পরিবেশকে উপলব্ধি করতে এবং ইন্টারঅ্যাক্ট করতে সক্ষম হতে হবে। এটিকে সাধারণত সেন্স → থিঙ্ক → অ্যাক্ট ডিসিশন লুপ বলা হয়।
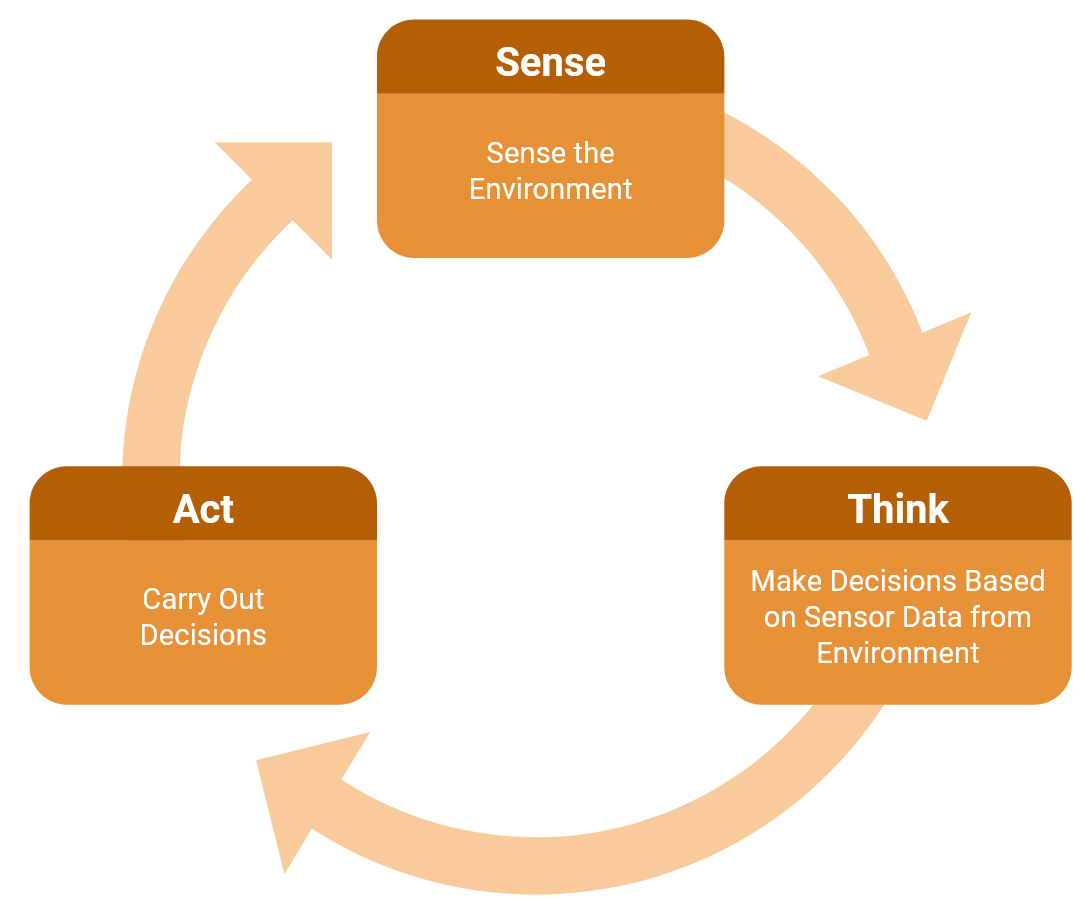
একটি ভিআর রোবট তার আশেপাশের পরিবেশ (সেন্স) থেকে তথ্য সংগ্রহ করতে, এই তথ্যের উপর ভিত্তি করে সিদ্ধান্ত নিতে (চিন্তা করতে) এবং সেই তথ্যকে আচরণের নির্দেশাবলীতে রূপান্তর করতে (কাজ করতে) সেন্সর ব্যবহার করে।
সেন্সরগুলি একটি VR রোবটকে তার পরিবেশের সাথে যোগাযোগ করতে সক্ষম করে এবং ব্যবহারকারীকে আরও গতিশীল প্রকল্প তৈরি করতে দেয়। এই গতিশীল প্রকল্পগুলির জন্য একটি VR রোবটের প্রয়োজন হয় যোগাযোগ করতে এবং পরিবর্তনশীল পরিবেশে প্রতিক্রিয়া জানাতে।
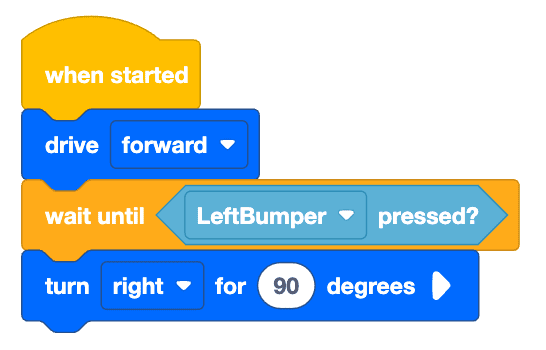
এই ইউনিটে, আপনাকে বাম্পার সেন্সরের সাথে পরিচয় করিয়ে দেওয়া হয়েছে, একটি সেন্সর যা শারীরিক যোগাযোগ সনাক্ত করতে পারে। বাম্পার সেন্সরটি একটি ভিআর রোবটকে জানানোর জন্য ব্যবহৃত হয় যখন এটি কোনও বস্তু বা দেয়ালের সাথে যোগাযোগ করে। একটি VR রোবট তারপর সিদ্ধান্ত নিতে বাম বাম্পার সেন্সর থেকে রিপোর্ট করা তথ্য ব্যবহার করতে পারে। নিচের উদাহরণে, VR রোবটটি সামনের দিকে গাড়ি চালাবে, তারপর বাম বাম্পার সেন্সর টিপানোর পরে 90 ডিগ্রি ডানে ঘুরবে, কোনও বস্তু বা দেয়ালের সাথে যোগাযোগ সনাক্ত করবে।