
പാഠം 1: ബമ്പർ സെൻസർ എന്താണ്?
ഈ പാഠത്തിൽ, ഒരു സെൻസർ എന്താണെന്നും ഒരു VR റോബോട്ടിനൊപ്പം നിങ്ങൾ എന്തിനാണ് സെൻസറുകൾ ഉപയോഗിക്കുന്നതെന്നും നിങ്ങൾ പഠിക്കും. നിങ്ങൾ ആദ്യം പഠിക്കുന്നത് ബമ്പർ സെൻസറിനെക്കുറിച്ച് ആയിരിക്കും. ഒരു VEXcode VR പ്രോജക്റ്റിൽ ബമ്പർ സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നുവെന്നും VR റോബോട്ട് ബമ്പർ സെൻസറുകൾ എങ്ങനെ ഉപയോഗിക്കാമെന്നും നിങ്ങൾ പഠിക്കും.
പഠന ഫലങ്ങൾ
- ബമ്പർ സെൻസർ ഒരു തരം സ്വിച്ച് ആണെന്ന് തിരിച്ചറിയുക.
- ബമ്പർ സെൻസർ FALSE (റിലീസ് ചെയ്തത്) അല്ലെങ്കിൽ TRUE (അമർത്തിയാൽ) എന്ന മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- അമർത്തുമ്പോഴോ വിടുമ്പോഴോ ഒരു VR റോബോട്ട് പ്രവർത്തനം നടത്താൻ ബമ്പർ സെൻസർ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- ബമ്പർ സെൻസർ അമർത്തിയാൽ റിപ്പോർട്ട് ചെയ്യുന്ന ഒരു ബൂളിയൻ ബ്ലോക്ക് ആണ് <Pressing bumper> എന്ന് തിരിച്ചറിയുക.
- ഒരു VEXcode VR പ്രോജക്റ്റിൽ ബമ്പർ സെൻസർ എന്തിനാണ് ഉപയോഗിക്കുന്നതെന്ന് വിവരിക്കുക.
ബമ്പർ സെൻസർ
വിആർ റോബോട്ടിന് മുന്നിൽ രണ്ട് ബമ്പർ സെൻസറുകൾ ഉണ്ട്.
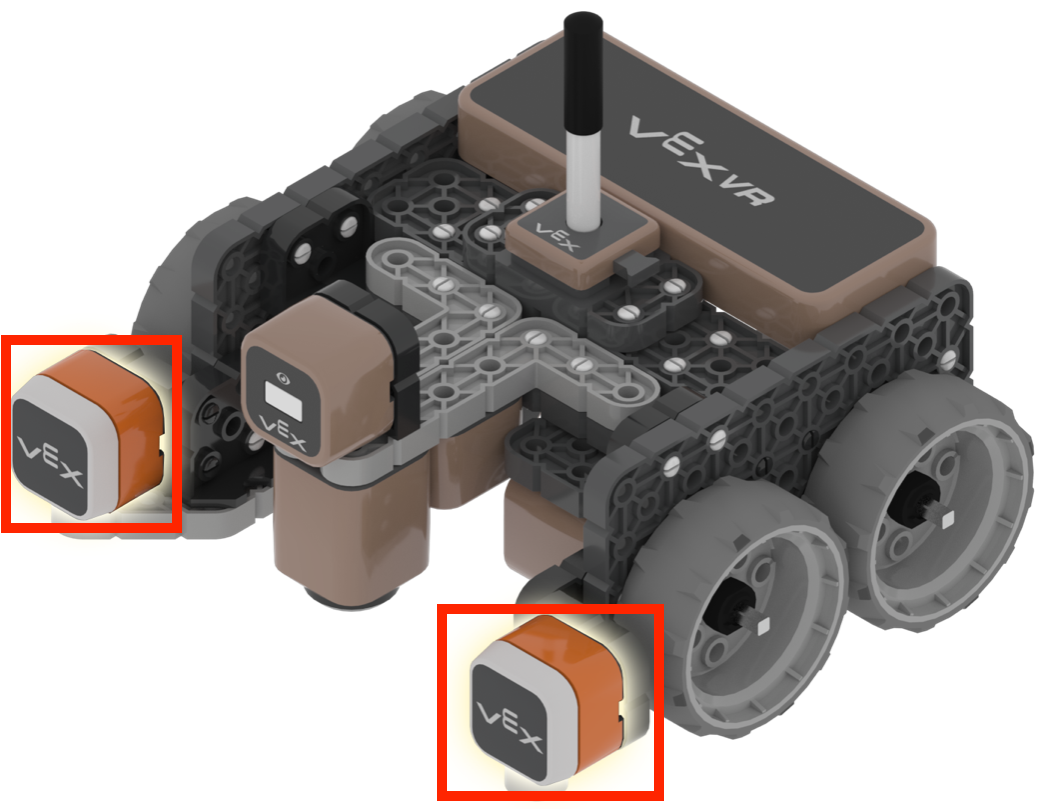
ബമ്പർ സെൻസർ എന്നത് ഒരു സ്വിച്ച് ആണ്, അത് അമർത്തിയാൽ അല്ലെങ്കിൽ വിട്ടാൽ അത് അറിയിക്കുന്നു.
- ബമ്പർ സെൻസർ അമർത്തുമ്പോൾ ബമ്പർ സെൻസർ TRUE എന്ന സെൻസർ മൂല്യം റിപ്പോർട്ട് ചെയ്യും.
- ബമ്പർ സെൻസർ റിലീസ് ചെയ്യുമ്പോൾ ബമ്പർ സെൻസർ FALSE എന്ന സെൻസർ മൂല്യം റിപ്പോർട്ട് ചെയ്യും.
വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ലെ ഭിത്തികളിലോ മറ്റ് പ്ലേഗ്രൗണ്ടുകൾക്ക് ചുറ്റുമുള്ള പുറം ഭിത്തികളിലോ ബമ്പർ സെൻസർ അമർത്തുന്നു.

വിആർ റോബോട്ട് ഒരു വസ്തുവിലോ ചുമരിലോ സ്പർശിക്കുന്നുണ്ടോ എന്ന് നിർണ്ണയിക്കാൻ ബമ്പർ സെൻസർ ഉപയോഗിക്കുന്നു. ബമ്പർ സെൻസറിന്റെ അവസ്ഥ പരിശോധിക്കാൻ ഒരു VEXcode VR പ്രോജക്റ്റിലെ <Pressing bumper> ബ്ലോക്ക് ഉപയോഗിക്കുക.
ബമ്പർ സെൻസർ എങ്ങനെ പ്രവർത്തിക്കുന്നു എന്നതിനെക്കുറിച്ചുള്ള വിശദമായ വിവരങ്ങൾക്ക് ബമ്പർ സെൻസർ - റോബോട്ട് സവിശേഷതകൾ - VEX VRഎന്ന ലേഖനം വായിക്കുക.
<Pressing bumper> ബ്ലോക്ക്
<Pressing bumper> ഒരു ബൂളിയൻ റിപ്പോർട്ടർ ബ്ലോക്ക് ആണ്. ബമ്പർ അമർത്തിയാൽ അത് TRUE എന്നും അമർത്തിയില്ലെങ്കിൽ FALSE എന്നും റിപ്പോർട്ട് ചെയ്യുന്നു.

സ്വിച്ച് ബ്ലോക്കുകൾ ഉപയോഗിക്കുന്നു
ഇതാണ് സ്വിച്ച് <Bumper pressed> ബ്ലോക്ക്.

ഷഡ്ഭുജ ബൂളിയൻ ബ്ലോക്കുകൾ സ്വീകരിക്കുന്ന കൺട്രോൾ വിഭാഗത്തിലെ ബ്ലോക്കുകൾക്കൊപ്പമാണ് <Pressing bumper> ബ്ലോക്ക് ഉപയോഗിക്കുന്നത്.
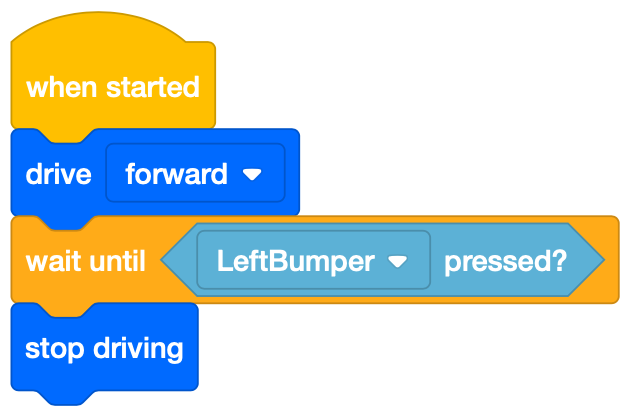
താഴെ കൊടുത്തിരിക്കുന്ന ഉദാഹരണത്തിൽ, ഇടത് ബമ്പർ അമർത്തുന്നത് വരെ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങും. ഇടത് ബമ്പർ അമർത്തിയാൽ, VR റോബോട്ട് ഡ്രൈവിംഗ് നിർത്തും.
പ്രയോഗിക്കുക
റോബോട്ടിക്സിന് സെൻസറുകൾ അത്യാവശ്യമാണ്. ഒരു വിആർ റോബോട്ടിനെ യഥാർത്ഥത്തിൽ ഒരു റോബോട്ടായി കണക്കാക്കണമെങ്കിൽ, അതിന് പരിസ്ഥിതിയെ മനസ്സിലാക്കാനും അതുമായി സംവദിക്കാനും കഴിയണം. ഇതിനെ സാധാരണയായി സെൻസ് → തിങ്ക് → ആക്ട് ഡിസിഷൻ ലൂപ്പ് എന്ന് വിളിക്കുന്നു.
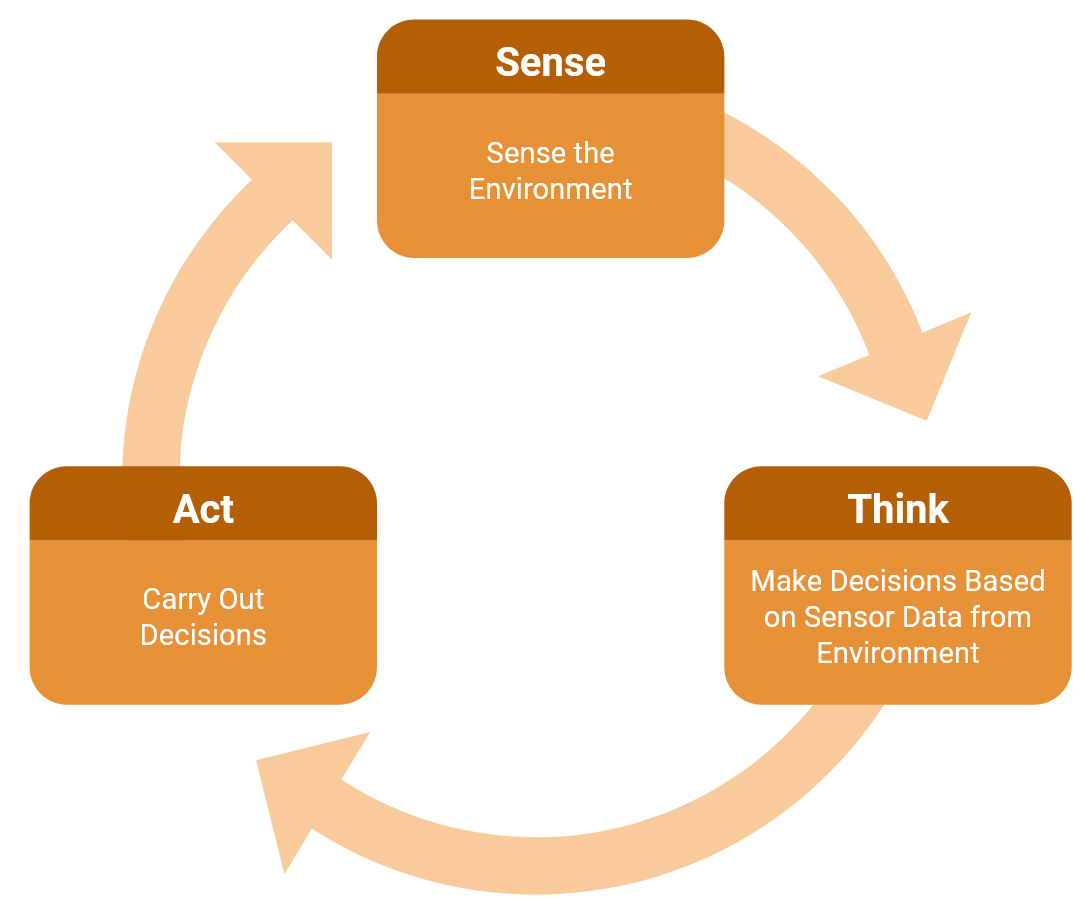
ഒരു VR റോബോട്ട് അതിന്റെ ചുറ്റുപാടുകളിൽ നിന്ന് ഡാറ്റ ശേഖരിക്കുന്നതിനും (Sense), ഈ വിവരങ്ങളെ അടിസ്ഥാനമാക്കി തീരുമാനങ്ങൾ എടുക്കുന്നതിനും (Think) ആ വിവരങ്ങൾ പെരുമാറ്റങ്ങൾക്കുള്ള നിർദ്ദേശങ്ങളാക്കി മാറ്റുന്നതിനും (Act) സെൻസറുകൾ ഉപയോഗിക്കുന്നു.
സെൻസറുകൾ ഒരു VR റോബോട്ടിനെ അതിന്റെ പരിസ്ഥിതിയുമായി സംവദിക്കാൻ പ്രാപ്തമാക്കുകയും ഉപയോക്താവിന് കൂടുതൽ ചലനാത്മകമായ പ്രോജക്ടുകൾ സൃഷ്ടിക്കാൻ അനുവദിക്കുകയും ചെയ്യുന്നു. മാറിക്കൊണ്ടിരിക്കുന്ന പരിതസ്ഥിതികളോട് സംവദിക്കാനും പ്രതികരിക്കാനും ഒരു വിആർ റോബോട്ട് ഈ ചലനാത്മക പദ്ധതികൾക്ക് ആവശ്യമാണ്.
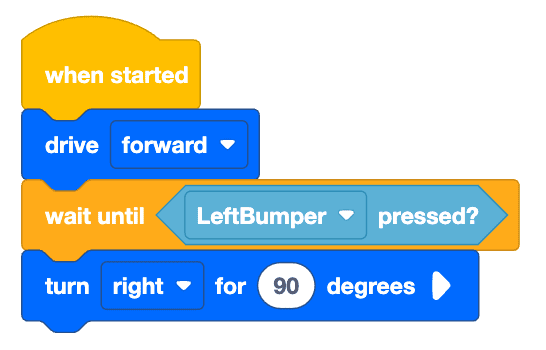
ഈ യൂണിറ്റിൽ, ശാരീരിക സമ്പർക്കം കണ്ടെത്താൻ കഴിയുന്ന ഒരു സെൻസറായ ബമ്പർ സെൻസറിനെ നിങ്ങൾക്ക് പരിചയപ്പെടുത്തുന്നു. ഒരു വിആർ റോബോട്ടിനെ ഒരു വസ്തുവുമായോ ചുമരുമായോ സമ്പർക്കം പുലർത്തുമ്പോൾ അറിയിക്കാൻ ബമ്പർ സെൻസർ ഉപയോഗിക്കുന്നു. ഇടത് ബമ്പർ സെൻസറിൽ നിന്ന് റിപ്പോർട്ട് ചെയ്യപ്പെട്ട വിവരങ്ങൾ ഉപയോഗിച്ച് ഒരു വിആർ റോബോട്ടിന് തീരുമാനങ്ങൾ എടുക്കാൻ കഴിയും. താഴെയുള്ള ഉദാഹരണത്തിൽ, VR റോബോട്ട് മുന്നോട്ട് നീങ്ങുകയും, ഇടത് ബമ്പർ സെൻസർ അമർത്തിയ ശേഷം 90 ഡിഗ്രി വലത്തേക്ക് തിരിയുകയും ചെയ്യും, അങ്ങനെ ഒരു വസ്തുവുമായോ ചുമരുമായോ ഉള്ള സമ്പർക്കം കണ്ടെത്തും.
ചോദ്യങ്ങൾ
പാഠ ക്വിസ് ആക്സസ് ചെയ്യുന്നതിന് താഴെയുള്ള ലിങ്ക് തിരഞ്ഞെടുക്കുക.