Bài 1: Cảm biến cản là gì?
Trong Bài học này, bạn sẽ tìm hiểu cảm biến là gì và tại sao bạn nên sử dụng cảm biến với Robot VR. Cảm biến đầu tiên mà bạn sẽ tìm hiểu là Cảm biến cản. Bạn sẽ tìm hiểu cách hoạt động của Cảm biến cản và cách sử dụng Cảm biến cản VR Robot trong dự án VR VEXcode.
Kết quả học tập
- Xác định rằng Cảm biến cản là một loại công tắc.
- Xác định rằng Cảm biến cản báo cáo giá trị SAI (đã nhả) hoặc ĐÚNG (đã nhấn).
- Xác định rằng Cảm biến cản có thể được sử dụng để gây ra hành động của Robot VR khi nhấn hoặc thả.
- Xác định khối <Pressing bumper> là khối Boolean báo cáo xem Cảm biến cản có được nhấn hay không.
- Mô tả lý do tại sao Cảm biến cản được sử dụng trong dự án VR VEXcode.
Cảm biến cản
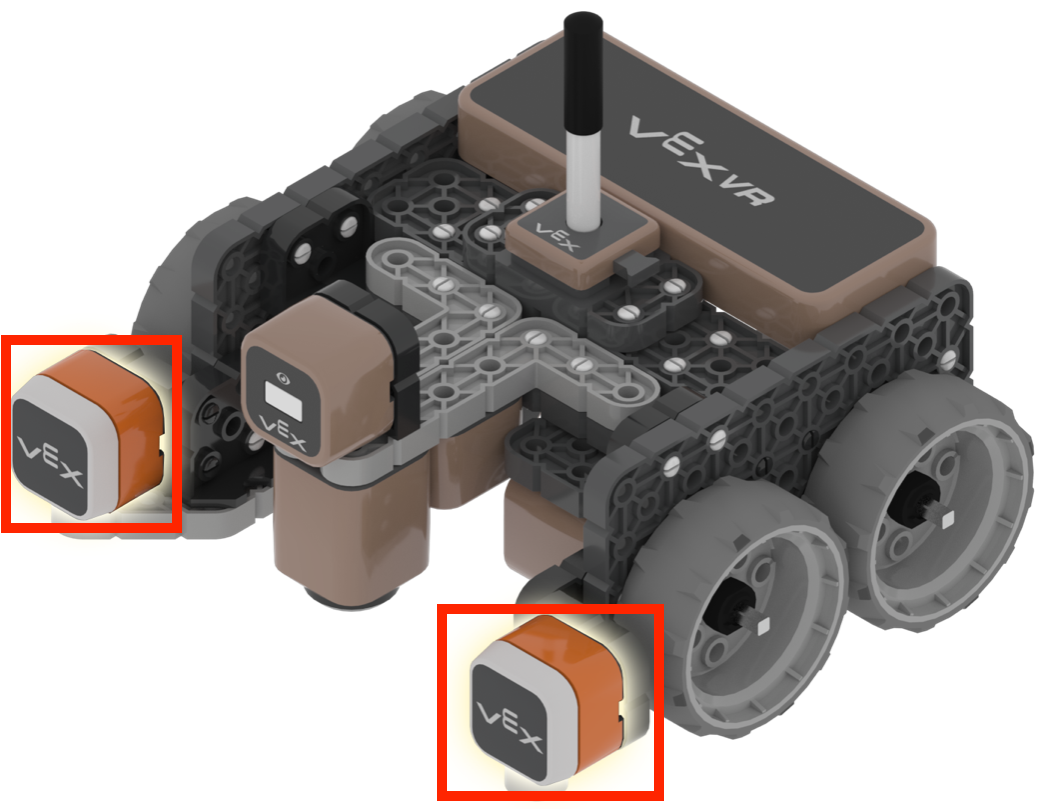
Robot VR có hai cảm biến cản nằm ở phía trước.
Cảm biến cản là công tắc báo hiệu khi nào nó được nhấn hoặc nhả.
- Cảm biến cản sẽ báo cáo giá trị cảm biến là ĐÚNG khi cảm biến cản được nhấn.
- Cảm biến cản sẽ báo cáo giá trị cảm biến là SAI khi cảm biến cản được nhả ra.
Cảm biến cản được ép bởi các bức tường trong Mê cung tường Sân chơihoặc bởi các bức tường bên ngoài bao quanh các Sân chơi khác.

Cảm biến cản được sử dụng để xác định xem Robot VR có chạm vào vật thể hay tường hay không. Sử dụng khối <Pressing bumper> trong dự án VEXcode VR để kiểm tra tình trạng của Cảm biến cản.
Đọc bài viết Bumper Sensor - Tính năng của Robot - VEX VRđể biết thông tin chi tiết về cách thức hoạt động của Bumper Sensor.
<Pressing bumper> Khối
<Pressing bumper> là khối báo cáo Boolean. Báo cáo là ĐÚNG nếu nhấn vào Bumper và SAI nếu không nhấn.

Sử dụng khối chuyển đổi
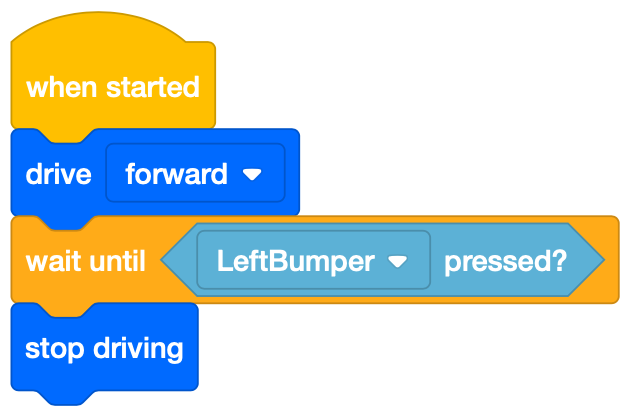
Đây là khối Switch <Bumper pressed>.

Khối <Pressing bumper> được sử dụng với các khối từ danh mục Điều khiển chấp nhận các khối Boolean lục giác.
Trong ví dụ sau, Robot VR sẽ di chuyển về phía trước cho đến khi nhấn vào Thanh cản bên trái. Khi nhấn vào cản trái, VR Robot sẽ dừng lái.
Áp dụng
Cảm biến rất cần thiết cho ngành robot. Để một Robot VR thực sự được coi là một robot, nó phải có khả năng cảm nhận và tương tác với môi trường xung quanh. Điều này thường được gọi là vòng lặp quyết định Cảm nhận → Suy nghĩ → Hành động.
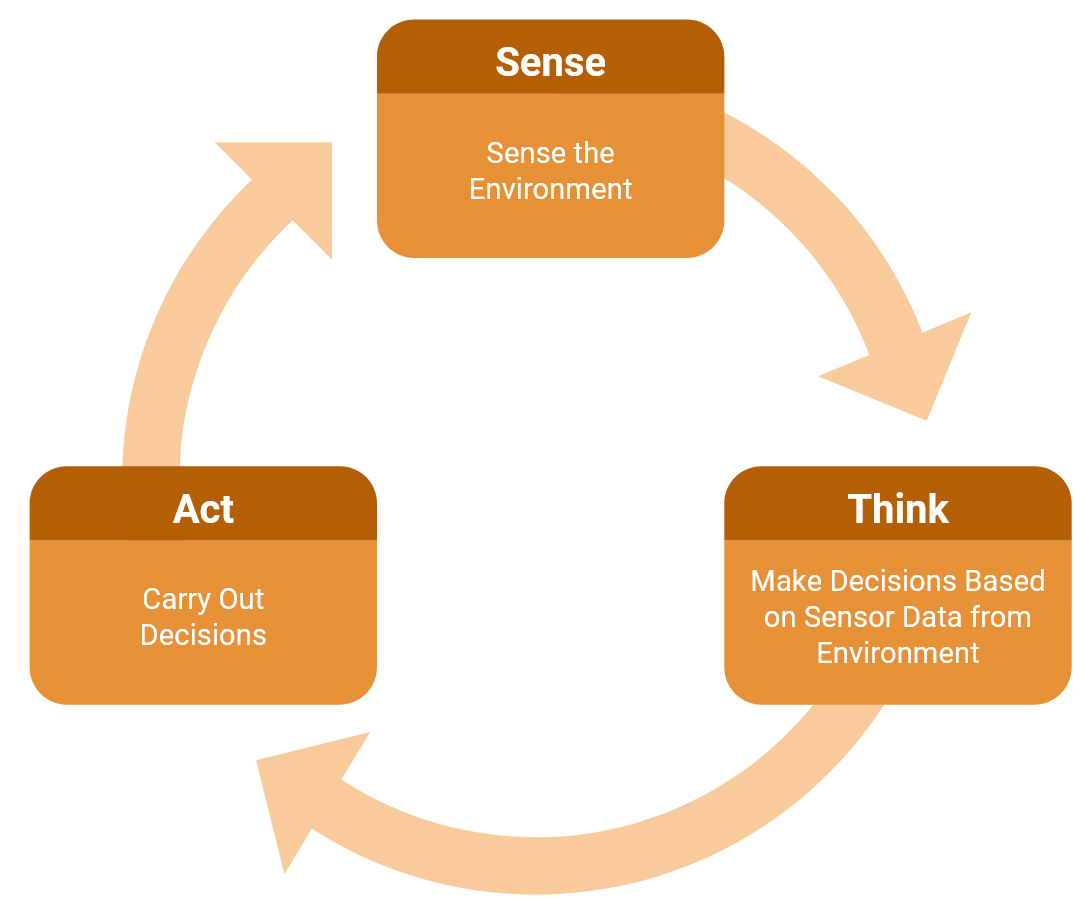
Robot VR sử dụng cảm biến để thu thập dữ liệu từ môi trường xung quanh (Cảm biến), đưa ra quyết định dựa trên thông tin này (Suy nghĩ) và biến thông tin đó thành hướng dẫn cho các hành vi (Hành động).
Cảm biến cho phép Robot VR tương tác với môi trường xung quanh và cho phép người dùng tạo ra các dự án năng động hơn. Những dự án năng động này đòi hỏi Robot VR phải tương tác và phản ứng với môi trường thay đổi.
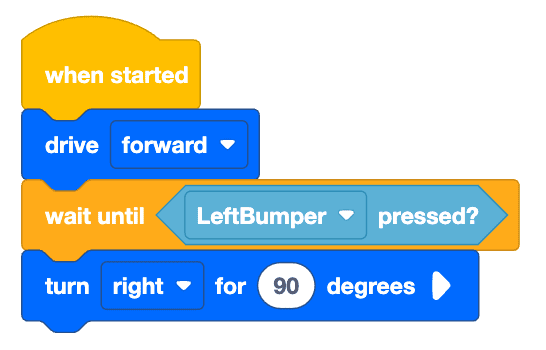
Trong Đơn vị này, bạn sẽ được giới thiệu về Cảm biến cản, một cảm biến có khả năng phát hiện tiếp xúc vật lý. Cảm biến cản được sử dụng để thông báo cho Robot VR khi nó tiếp xúc với vật thể hoặc tường. Sau đó, Robot VR có thể sử dụng thông tin được báo cáo từ Cảm biến cản bên trái để đưa ra quyết định. Trong ví dụ dưới đây, VR Robot sẽ tiến về phía trước, sau đó rẽ phải 90 độ sau khi Cảm biến cản trái được nhấn, phát hiện tiếp xúc với vật thể hoặc tường.