
บทเรียนที่ 1: เซ็นเซอร์กันชนคืออะไร?
ในบทเรียนนี้คุณจะได้เรียนรู้ว่าเซ็นเซอร์คืออะไรและทำไมคุณถึงใช้เซ็นเซอร์กับหุ่นยนต์ VR เซ็นเซอร์แรกที่คุณจะได้เรียนรู้คือเซ็นเซอร์กันชน คุณจะได้เรียนรู้วิธีการทำงานของเซ็นเซอร์กันชนและวิธีการใช้เซ็นเซอร์กันชนหุ่นยนต์ VR ในโครงการ VEXcode VR
ผลการเรียนรู้
- ระบุว่าเซ็นเซอร์กันชนเป็นสวิตช์ประเภทหนึ่ง
- ระบุว่าเซ็นเซอร์กันชนรายงานค่าเป็นเท็จ (ปล่อย) หรือจริง (กด)
- ระบุว่าสามารถใช้เซ็นเซอร์กันชนเพื่อทำให้เกิดการทำงานของหุ่นยนต์ VR เมื่อกดหรือปล่อย
- ระบุว่า <Pressing bumper> บล็อกเป็นบูลีนที่รายงานว่ามีการกดเซ็นเซอร์กันชนหรือไม่
- อธิบายว่าเหตุใดจึงใช้เซ็นเซอร์กันชนในโครงการ VEXcode VR
เซ็นเซอร์กันชน
หุ่นยนต์ VR มีเซ็นเซอร์กันชนสองตัวอยู่ที่ด้านหน้า
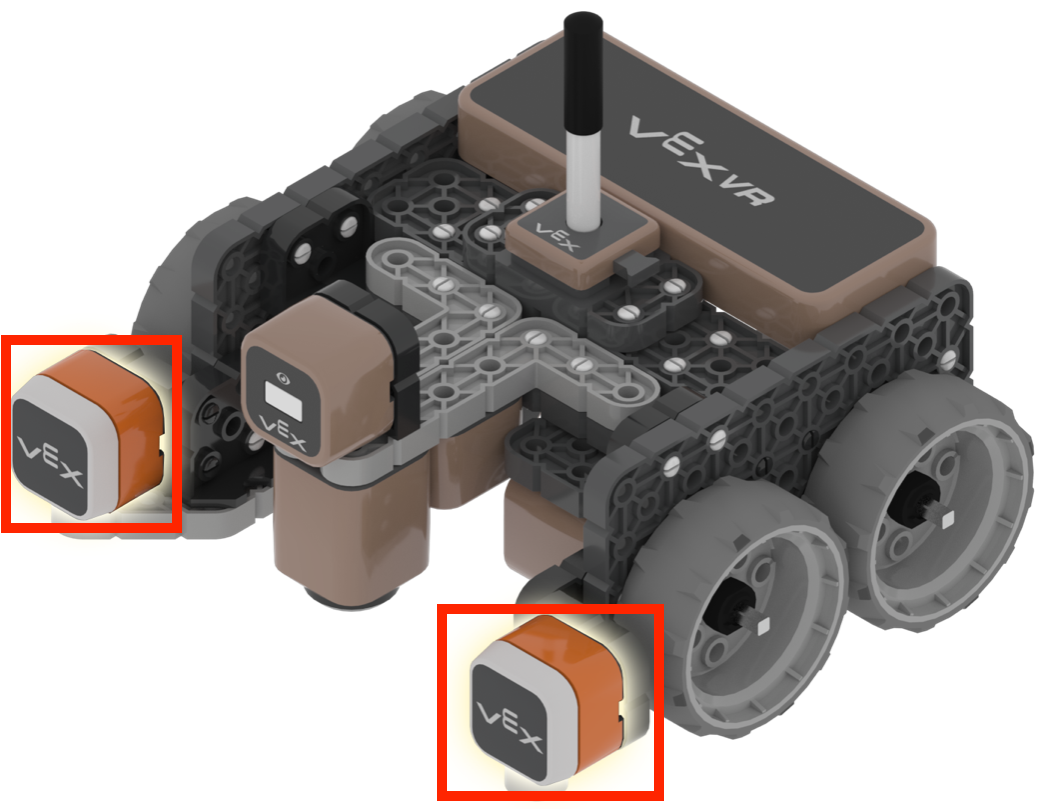
เซ็นเซอร์กันชนคือสวิทช์ที่จะรายงานว่ามีการกดหรือปล่อย
- เซ็นเซอร์กันชนจะรายงานค่าเซ็นเซอร์เป็น TRUE เมื่อกดเซ็นเซอร์กันชน
- เซ็นเซอร์กันชนจะรายงานค่าเซ็นเซอร์เป็นเท็จเมื่อปล่อยเซ็นเซอร์กันชน
เซ็นเซอร์กันชนจะถูกกดโดยผนังในเขาวงกตผนัง สนามเด็กเล่นหรือโดยผนังด้านนอกที่ล้อมรอบสนามเด็กเล่นอื่นๆ

ใช้เซ็นเซอร์กันชนเพื่อตรวจสอบว่าหุ่นยนต์ VR สัมผัสวัตถุหรือผนังหรือไม่ ใช้ <Pressing bumper> บล็อกในโครงการ VEXcode VR เพื่อตรวจสอบสภาพของเซ็นเซอร์กันชน
อ่านเซ็นเซอร์กัน ชน - คุณสมบัติของหุ่นยนต์ - บทความ vex VR สำหรับข้อมูลโดยละเอียดเกี่ยวกับวิธีการทำงานของเซ็นเซอร์กันชน
<Pressing bumper> บล็อค
<Pressing bumper> เป็นบล็อกนักข่าวบูลีน รายงานว่าเป็นจริงหรือไม่หากมีการกดกันชนและเป็นเท็จหากไม่มีการกดกันชน

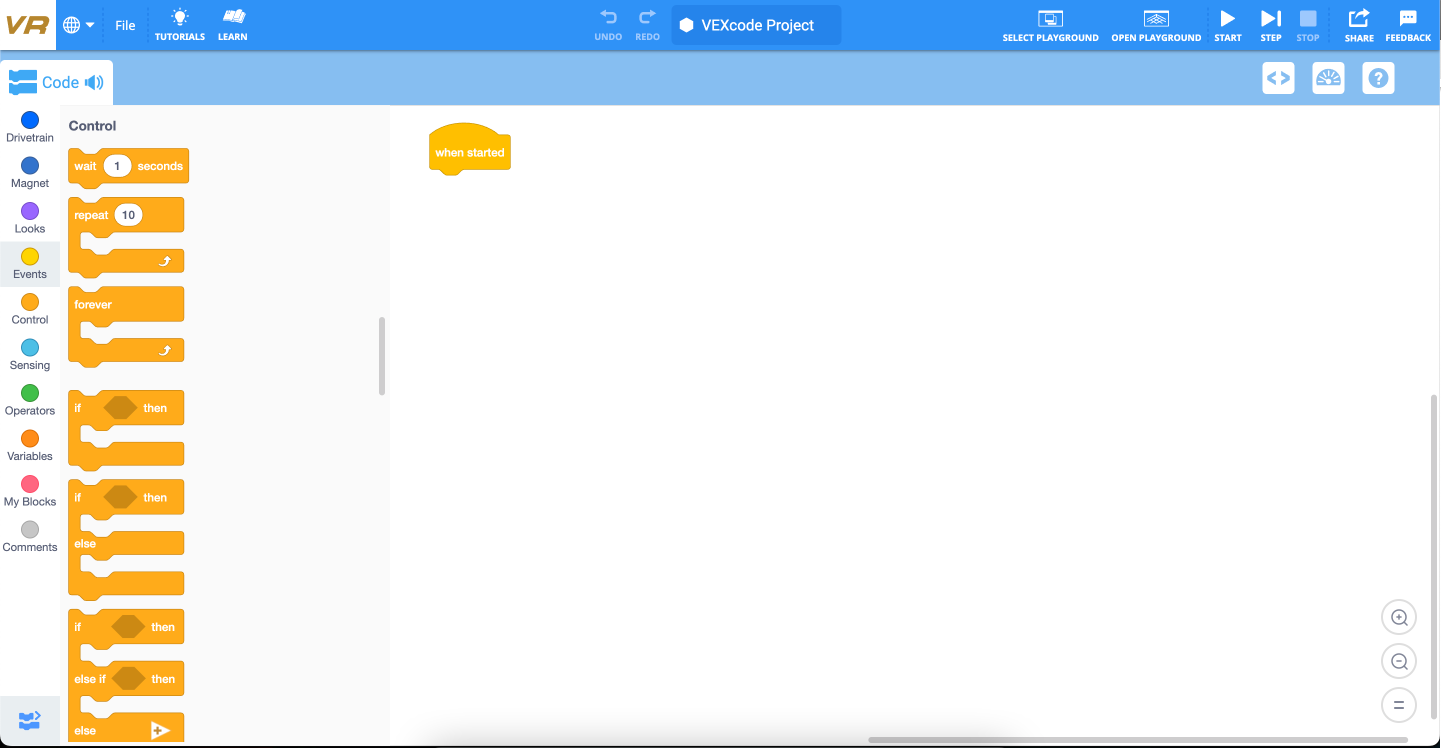
การใช้สวิทช์บล็อก
นี่ <Bumper pressed> คือบล็อค Switch

<Pressing bumper> บล็อกนี้ใช้กับบล็อกจากหมวดหมู่การควบคุมที่ยอมรับบล็อกบูลีนหกเหลี่ยม
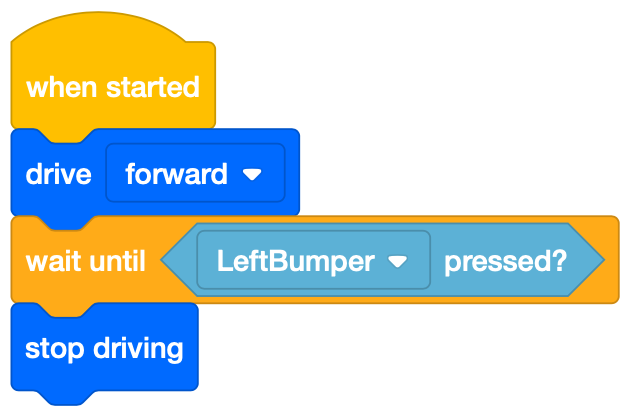
ในตัวอย่างต่อไปนี้หุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าจนกว่าจะกดกันชนซ้าย เมื่อกดกันชนซ้ายแล้วหุ่นยนต์ VR จะหยุดการขับขี่
นำไปใช้
เซ็นเซอร์มีความสำคัญต่อหุ่นยนต์ เพื่อให้หุ่นยนต์ VR ได้รับการพิจารณาว่าเป็นหุ่นยนต์อย่างแท้จริงหุ่นยนต์จะต้องสามารถรับรู้และโต้ตอบกับสภาพแวดล้อมได้ โดยทั่วไปจะเรียกว่าวงการตัดสินใจ Sense → Think → Act

หุ่นยนต์ VR ใช้เซ็นเซอร์ในการรวบรวมข้อมูลจากสภาพแวดล้อม (Sense) ตัดสินใจตามข้อมูลนี้ (Think) และเปลี่ยนข้อมูลนั้นให้เป็นคำแนะนำสำหรับพฤติกรรม (Act)
เซ็นเซอร์ช่วยให้หุ่นยนต์ VR สามารถโต้ตอบกับสภาพแวดล้อมและช่วยให้ผู้ใช้สามารถสร้างโครงการแบบไดนามิกได้มากขึ้น โครงการแบบไดนามิกเหล่านี้ต้องใช้หุ่นยนต์ VR เพื่อโต้ตอบและตอบสนองต่อสภาพแวดล้อมที่เปลี่ยนแปลงไป
ในหน่วยนี้คุณจะได้รู้จักกับเซ็นเซอร์กันชนซึ่งเป็นเซ็นเซอร์ที่สามารถตรวจจับการสัมผัสทางกายภาพได้ เซ็นเซอร์กันชนใช้เพื่อแจ้งให้หุ่นยนต์ VR ทราบเมื่อสัมผัสกับวัตถุหรือผนัง หุ่นยนต์ VR สามารถใช้ข้อมูลที่รายงานจากเซ็นเซอร์กันชนด้านซ้ายเพื่อตัดสินใจได้ ในตัวอย่างด้านล่างหุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าจากนั้นเลี้ยวขวา 90 องศาหลังจากกดเซ็นเซอร์กันชนด้านซ้ายตรวจจับการสัมผัสกับวัตถุหรือผนัง
