पाठ 1: बम्पर सेंसर क्या है?
इस पाठ में, आप सीखेंगे कि सेंसर क्या है और आप वीआर रोबोट के साथ सेंसर का उपयोग क्यों करेंगे। पहला सेंसर जिसके बारे में आप जानेंगे वह है बम्पर सेंसर। आप सीखेंगे कि बम्पर सेंसर कैसे काम करता है और VEXcode VR प्रोजेक्ट में VR रोबोट बम्पर सेंसर का उपयोग कैसे करें।
सीखने के परिणाम
- पहचानें कि बम्पर सेंसर एक प्रकार का स्विच है।
- पहचानें कि बम्पर सेंसर या तो FALSE (रिलीज़) या TRUE (दबाया) मान रिपोर्ट करता है।
- पहचानें कि बम्पर सेंसर को दबाने या छोड़ने पर VR रोबोट क्रिया करने के लिए इस्तेमाल किया जा सकता है।
- पहचानें कि <Pressing bumper> ब्लॉक एक बूलियन है जो रिपोर्ट करता है कि बम्पर सेंसर दबाया गया है या नहीं।
- वर्णन करें कि VEXcode VR परियोजना में बम्पर सेंसर का उपयोग क्यों किया जाएगा।
बम्पर सेंसर
वीआर रोबोट में सामने की ओर दो बम्पर सेंसर लगे हैं।
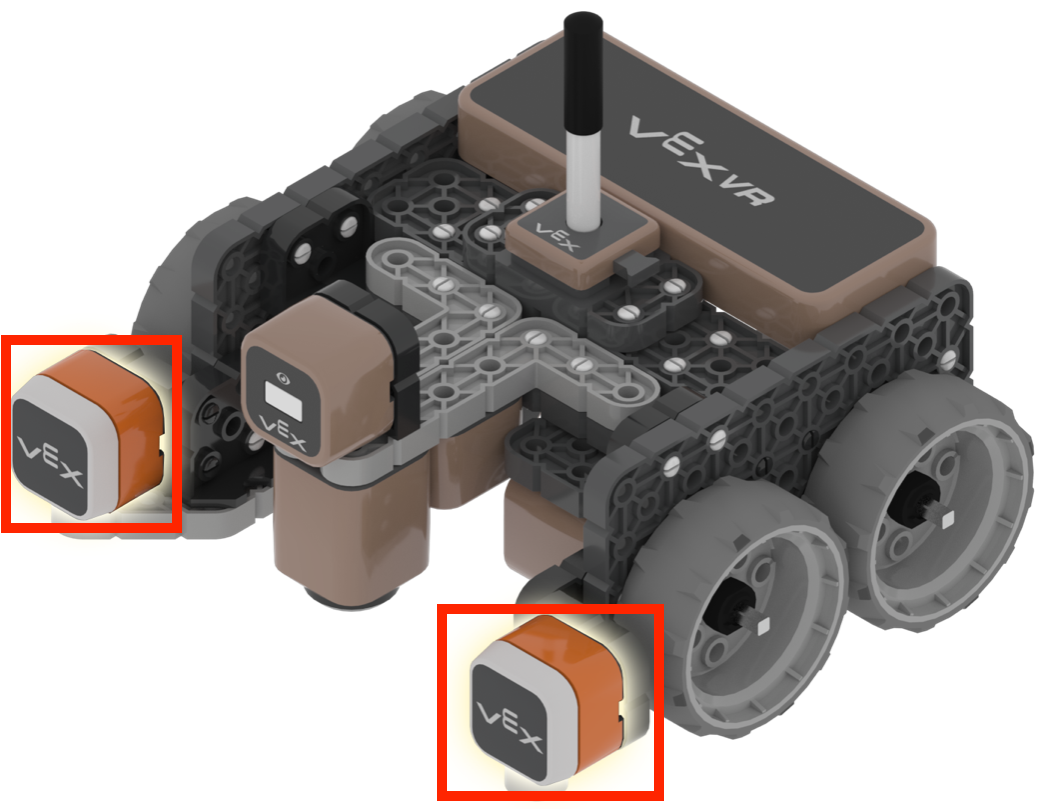
बम्पर सेंसर एक स्विच है जो यह बताता है कि इसे दबाया गया है या छोड़ा गया है।
- जब बम्पर सेंसर को दबाया जाएगा तो बम्पर सेंसर TRUE का सेंसर मान रिपोर्ट करेगा।
- जब बम्पर सेंसर को छोड़ा जाएगा तो बम्पर सेंसर FALSE मान की रिपोर्ट करेगा।
बम्पर सेंसर को की दीवारों द्वारा, या अन्य खेल के मैदानों के आसपास की बाहरी दीवारों द्वारा दबाया जाता है

बम्पर सेंसर का उपयोग यह निर्धारित करने के लिए किया जाता है कि वीआर रोबोट किसी वस्तु या दीवार को छू रहा है या नहीं। बम्पर सेंसर की स्थिति की जांच करने के लिए VEXcode VR प्रोजेक्ट में <Pressing bumper> ब्लॉक का उपयोग करें।
बम्पर सेंसर कैसे काम करता है, इसकी विस्तृत जानकारी के लिए बम्पर सेंसर - रोबोट विशेषताएँ - VEX VRलेख पढ़ें।
<Pressing bumper> ब्लॉक
<Pressing bumper> एक बूलियन रिपोर्टर ब्लॉक है। यदि बम्पर दबाया जाता है तो यह सत्य रिपोर्ट करता है, तथा यदि इसे नहीं दबाया जाता है तो यह असत्य रिपोर्ट करता है।

स्विच ब्लॉक का उपयोग करना
यह स्विच <Bumper pressed> ब्लॉक है।

<Pressing bumper> ब्लॉक का उपयोग नियंत्रण श्रेणी के ब्लॉकों के साथ किया जाता है जो हेक्सागोनल बूलियन ब्लॉकों को स्वीकार करता है।
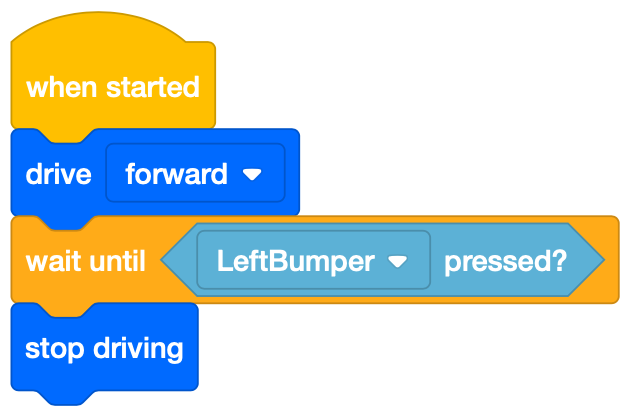
निम्नलिखित उदाहरण में, वीआर रोबोट तब तक आगे बढ़ता रहेगा जब तक कि बायां बम्पर दबाया नहीं जाता। एक बार बाएं बम्पर को दबा दिया जाए तो वीआर रोबोट गाड़ी चलाना बंद कर देगा।
आवेदन करना
रोबोटिक्स के लिए सेंसर आवश्यक हैं। किसी वीआर रोबोट को वास्तव में रोबोट माने जाने के लिए, उसे अपने पर्यावरण को समझने और उसके साथ अंतःक्रिया करने में सक्षम होना चाहिए। इसे सामान्यतः 'सेंस → थिंक → एक्ट' निर्णय लूप के रूप में संदर्भित किया जाता है।
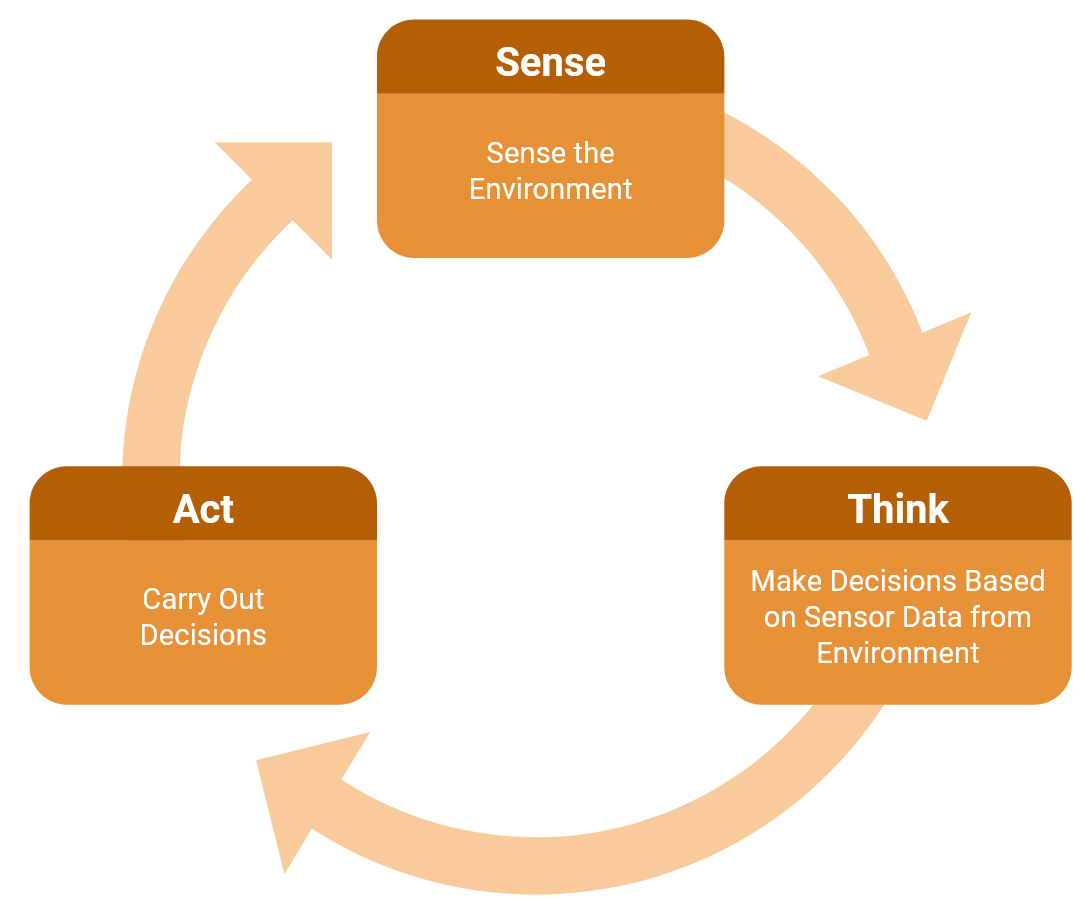
एक वीआर रोबोट अपने आस-पास से डेटा एकत्र करने के लिए सेंसर का उपयोग करता है (सेंस), इस जानकारी के आधार पर निर्णय लेता है (सोचता है) और उस जानकारी को व्यवहार के लिए निर्देशों में बदल देता है (कार्य करता है)।
सेंसर वीआर रोबोट को अपने वातावरण के साथ अंतःक्रिया करने में सक्षम बनाते हैं, तथा उपयोगकर्ता को अधिक गतिशील परियोजनाएं बनाने की अनुमति देते हैं। इन गतिशील परियोजनाओं के लिए बदलते परिवेश के साथ बातचीत करने और प्रतिक्रिया देने के लिए VR रोबोट की आवश्यकता होती है।
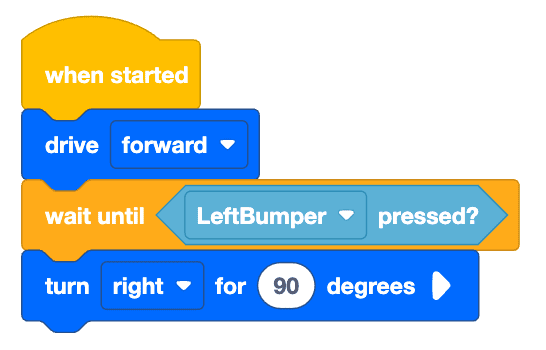
इस इकाई में आपको बम्पर सेंसर से परिचित कराया जाएगा, जो एक ऐसा सेंसर है जो शारीरिक संपर्क का पता लगा सकता है। बम्पर सेंसर का उपयोग वीआर रोबोट को यह सूचित करने के लिए किया जाता है कि उसने किसी वस्तु या दीवार के साथ संपर्क बनाया है। इसके बाद वीआर रोबोट निर्णय लेने के लिए बाएं बम्पर सेंसर से प्राप्त जानकारी का उपयोग कर सकता है। नीचे दिए गए उदाहरण में, वीआर रोबोट आगे बढ़ेगा, फिर बाएं बम्पर सेंसर को दबाने के बाद 90 डिग्री का दाहिना मोड़ लेगा, जिससे किसी वस्तु या दीवार के साथ संपर्क का पता चल जाएगा।