Pelajaran 1: Apa itu Sensor Bumper?
Dalam Pelajaran ini, Anda akan mempelajari apa itu sensor dan mengapa Anda harus menggunakan sensor dengan Robot VR. Sensor pertama yang akan Anda pelajari adalah Bumper Sensor. Anda akan mempelajari cara kerja Bumper Sensor dan cara menggunakan VR Robot Bumper Sensor dalam proyek VR VEXcode.
Hasil belajar
- Identifikasi bahwa Bumper Sensor adalah jenis sakelar.
- Identifikasi bahwa Bumper Sensor melaporkan nilai FALSE (dilepas) atau TRUE (ditekan).
- Identifikasi bahwa Sensor Bumper dapat digunakan untuk menyebabkan aksi Robot VR saat ditekan atau dilepaskan.
- Identifikasi bahwa blok <Pressing bumper> adalah Boolean yang melaporkan jika Bumper Sensor ditekan.
- Jelaskan mengapa Bumper Sensor akan digunakan dalam proyek VEXcode VR.
Sensor Bumper
Robot VR memiliki dua Sensor Bumper yang terletak di bagian depan.
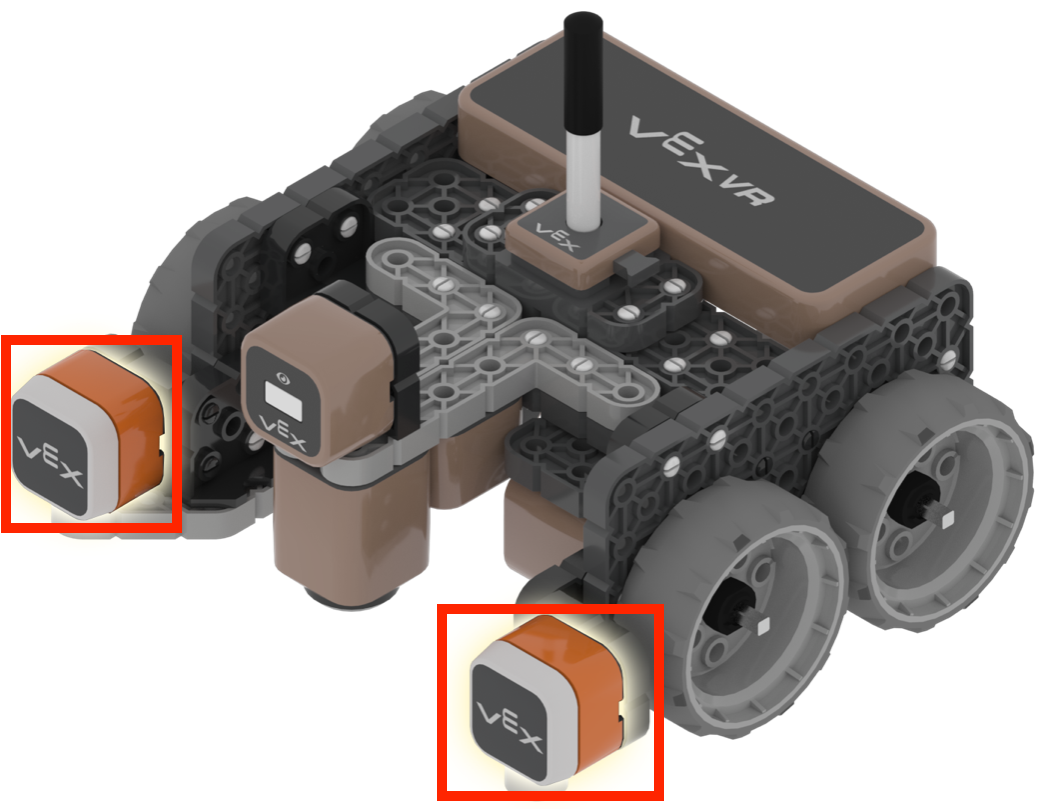
Sensor Bumper adalah sakelar yang memberi laporan jika ditekan atau dilepas.
- Sensor Bumper akan melaporkan nilai sensor TRUE saat Sensor Bumper ditekan.
- Sensor Bumper akan melaporkan nilai sensor FALSE saat Sensor Bumper dilepaskan.
Sensor Bumper ditekan oleh dinding di Wall Maze Playground, atau oleh dinding luar yang mengelilingi Playground lainnya.

Sensor Bumper digunakan untuk menentukan apakah Robot VR menyentuh suatu objek atau dinding. Gunakan blok <Pressing bumper> dalam proyek VEXcode VR untuk memeriksa kondisi Bumper Sensor.
Baca artikel Bumper Sensor - Fitur Robot - VEX VRuntuk informasi terperinci tentang cara kerja Bumper Sensor.
<Pressing bumper> Blok
<Pressing bumper> adalah blok reporter Boolean. Ia melaporkan TRUE jika Bumper ditekan, dan FALSE jika tidak ditekan.

Menggunakan Blok Switch
Ini adalah blok Switch <Bumper pressed>.

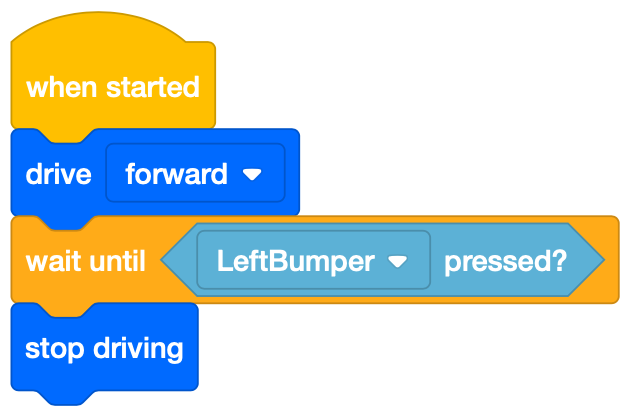
Blok <Pressing bumper> digunakan dengan blok dari kategori Kontrol yang menerima blok Boolean heksagonal.
Dalam contoh berikut, Robot VR akan melaju maju hingga Bumper Kiri ditekan. Setelah Bumper Kiri ditekan, Robot VR akan berhenti melaju.
Menerapkan
Sensor sangat penting bagi robotika. Agar Robot VR benar-benar dianggap sebagai robot, ia harus mampu merasakan dan berinteraksi dengan lingkungannya. Hal ini secara umum disebut sebagai siklus keputusan Sense → Think → Act.
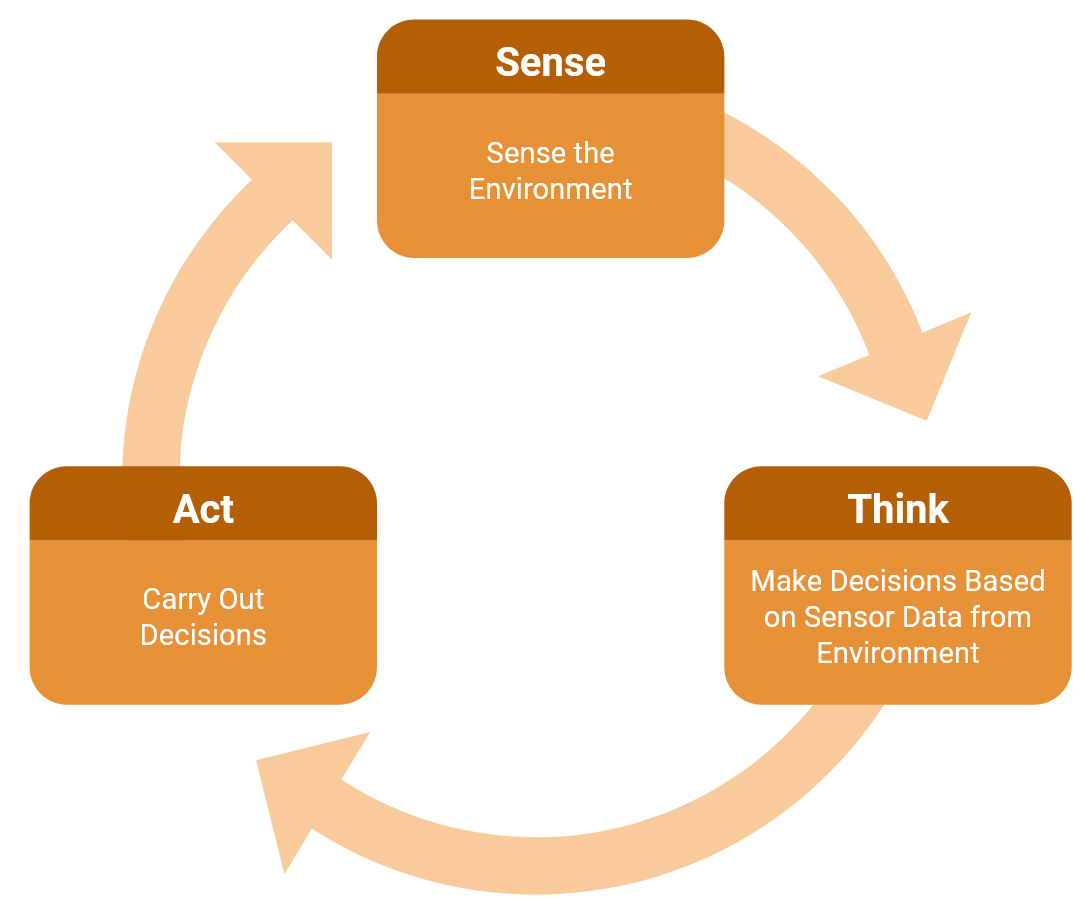
Robot VR menggunakan sensor untuk mengumpulkan data dari lingkungan sekitarnya (Sense), membuat keputusan berdasarkan informasi ini (Think) dan mengubah informasi tersebut menjadi instruksi untuk perilaku (Act).
Sensor memungkinkan Robot VR berinteraksi dengan lingkungannya, dan memungkinkan pengguna membuat proyek yang lebih dinamis. Proyek dinamis ini memerlukan Robot VR untuk berinteraksi dan merespons perubahan lingkungan.
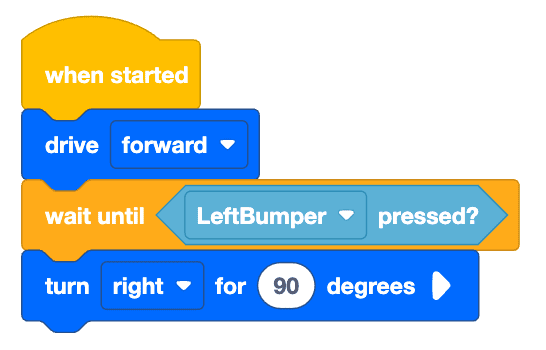
Dalam Unit ini, Anda diperkenalkan dengan Bumper Sensor, sebuah sensor yang dapat mendeteksi kontak fisik. Sensor Bumper digunakan untuk memberi tahu Robot VR saat telah melakukan kontak dengan suatu objek atau dinding. Robot VR kemudian dapat menggunakan informasi yang dilaporkan dari Sensor Bumper Kiri untuk membuat keputusan. Dalam contoh di bawah, Robot VR akan melaju ke depan, lalu berbelok ke kanan 90 derajat setelah Sensor Bumper Kiri ditekan, mendeteksi kontak dengan objek atau dinding.