수업 1: 범퍼 센서란 무엇인가요?
이 수업에서는 센서가 무엇이고 VR 로봇에 센서를 사용하는 이유를 알아봅니다. 여러분이 배우게 될 첫 번째 센서는 범퍼 센서입니다. 범퍼 센서가 작동하는 방식과 VEXcode VR 프로젝트에서 VR 로봇 범퍼 센서를 사용하는 방법을 알아봅니다.
학습 성과
- 범퍼 센서가 스위치의 한 유형이라는 것을 확인하세요.
- 범퍼 센서가 FALSE(놓임) 또는 TRUE(누름) 값을 보고하는지 확인합니다.
- 범퍼 센서를 누르거나 놓으면 VR 로봇이 동작하는 데 사용할 수 있다는 것을 알아보세요.
- <Pressing bumper> 블록은 범퍼 센서가 눌렸는지 보고하는 부울 값임을 식별합니다.
- VEXcode VR 프로젝트에서 범퍼 센서를 사용하는 이유를 설명하세요.
범퍼 센서
VR 로봇에는 전면에 범퍼 센서가 두 개 있습니다.
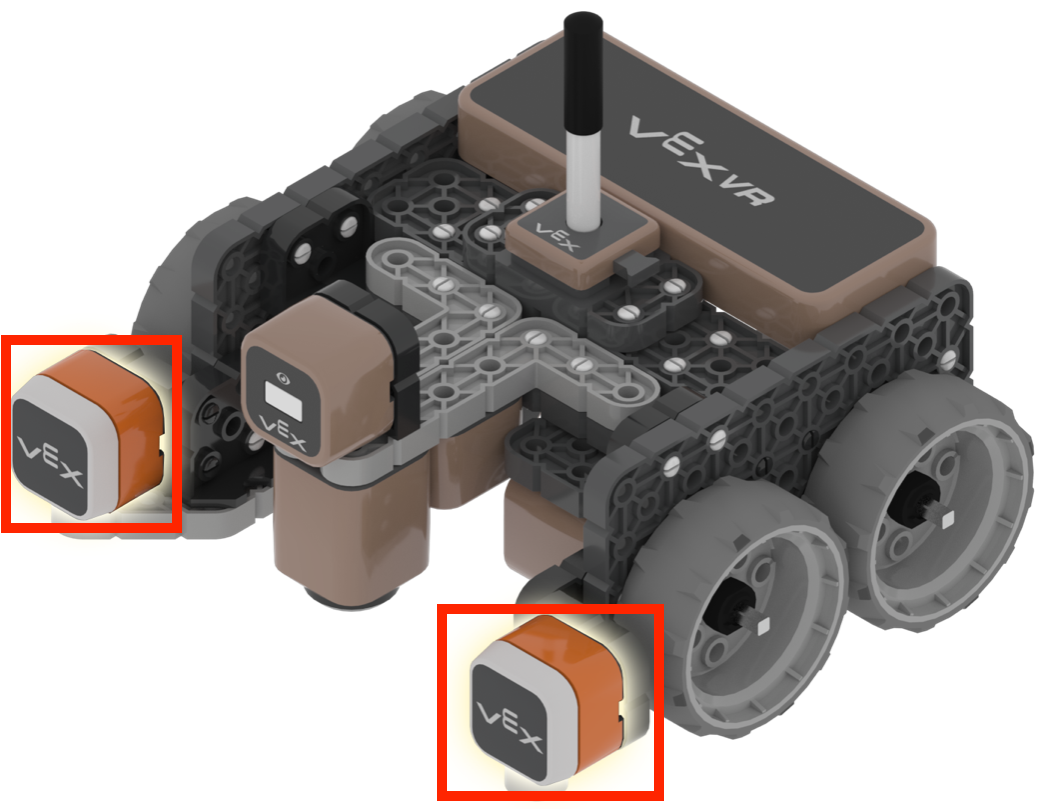
범퍼 센서는 눌렸는지 놓았는지 알려주는 스위치입니다.
- 범퍼 센서가 눌리면 범퍼 센서는 TRUE의 센서 값을 보고합니다.
- 범퍼 센서가 해제되면 범퍼 센서는 FALSE라는 센서 값을 보고합니다.
범퍼 센서는 벽 미로 놀이터의 벽이나 다른 놀이터를 둘러싼 바깥쪽 벽에 의해 눌립니다.

범퍼 센서는 VR 로봇이 물체나 벽에 닿아 있는지 확인하는 데 사용됩니다. VEXcode VR 프로젝트에서 <Pressing bumper> 블록을 사용하여 범퍼 센서의 상태를 확인합니다.
범퍼 센서의 작동 방식에 대한 자세한 내용은 범퍼 센서 - 로봇 기능 - VEX VR문서를 읽어보세요.
<Pressing bumper> 블록
<Pressing bumper> 부울 리포터 블록입니다. 범퍼가 눌렸으면 TRUE를 보고하고, 눌리지 않았으면 FALSE를 보고합니다.

스위치 블록 사용
이것은 스위치 <Bumper pressed> 블록입니다.

<Pressing bumper> 블록은 육각형 부울 블록을 허용하는 Control 범주의 블록과 함께 사용됩니다.
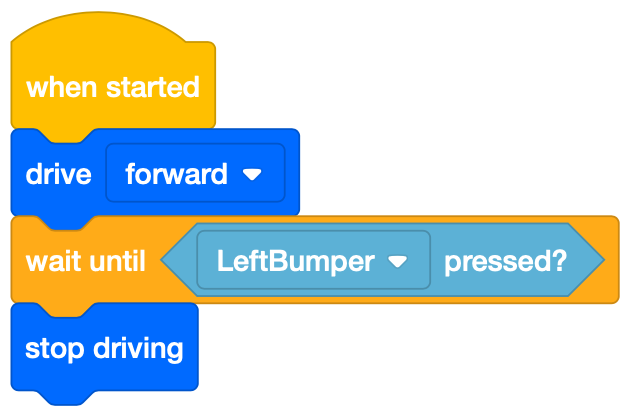
다음 예에서 VR 로봇은 왼쪽 범퍼를 누를 때까지 앞으로 주행합니다. 왼쪽 범퍼를 누르면 VR 로봇의 주행이 멈춥니다.
적용하다
센서는 로봇공학에 필수적이다. VR 로봇이 진정한 로봇으로 간주되려면 주변 환경을 감지하고 상호 작용할 수 있어야 합니다. 이는 일반적으로 감지→생각→행동 결정 루프라고 합니다.
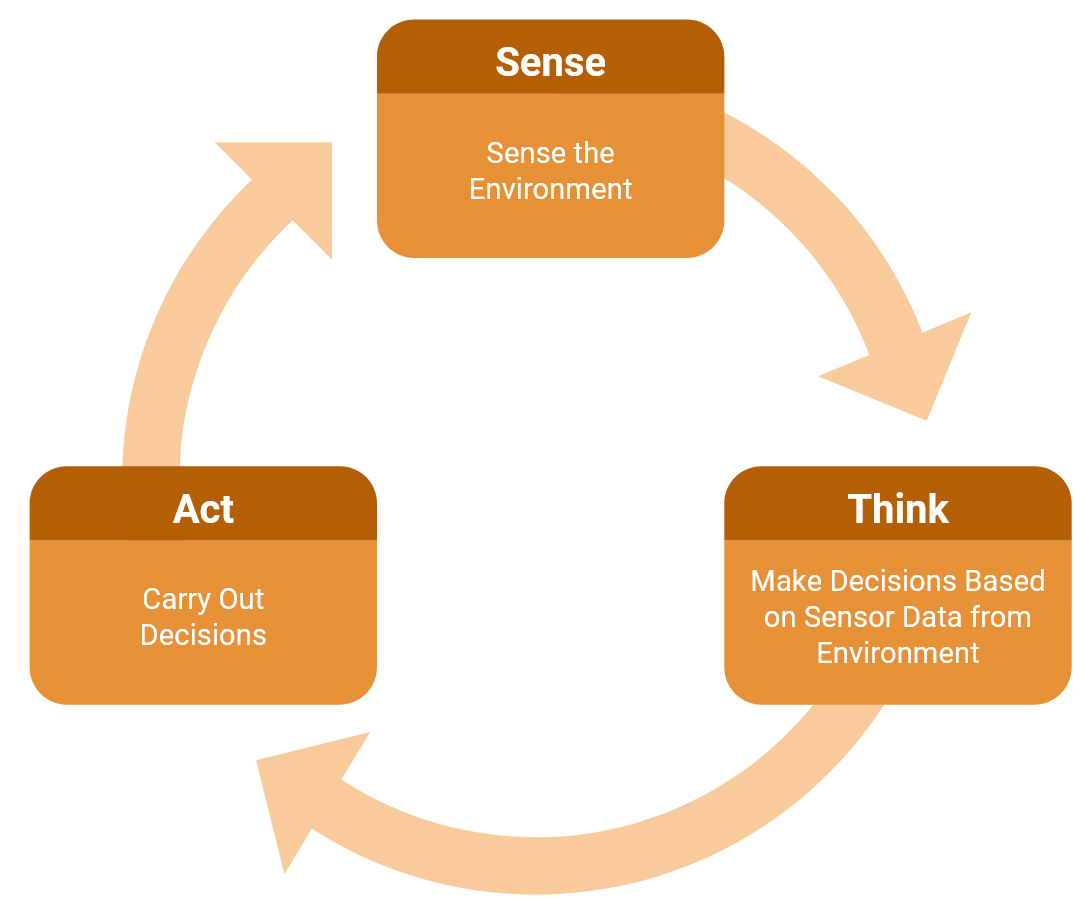
VR 로봇은 센서를 사용하여 주변 환경에서 데이터를 수집(감지)하고, 이 정보를 바탕으로 결정을 내리고(사고), 이 정보를 행동 지침으로 전환(행동)합니다.
센서를 통해 VR 로봇은 주변 환경과 상호 작용할 수 있으며, 사용자는 더욱 동적인 프로젝트를 만들 수 있습니다. 이러한 역동적인 프로젝트에는 VR 로봇이 변화하는 환경과 상호 작용하고 대응할 수 있는 것이 필요합니다.
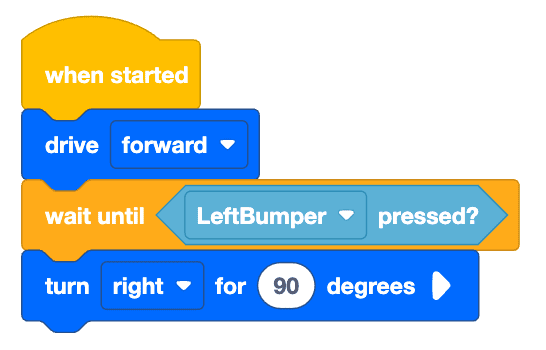
이 단원에서는 물리적 접촉을 감지할 수 있는 센서인 범퍼 센서를 소개합니다. 범퍼 센서는 VR 로봇이 물체나 벽과 접촉했을 때 이를 알리는 데 사용됩니다. VR 로봇은 좌측 범퍼 센서로부터 보고된 정보를 활용하여 결정을 내릴 수 있습니다. 아래 예에서 VR 로봇은 앞으로 주행한 다음, 좌측 범퍼 센서를 누르면 90도 오른쪽으로 회전하여 물체나 벽과의 접촉을 감지합니다.