
Leçon 1 : Qu'est-ce qu'un capteur de pare-chocs ?
Dans cette leçon, vous apprendrez ce qu'est un capteur et pourquoi vous utiliseriez des capteurs avec un robot VR. Le premier capteur que vous découvrirez est le capteur de pare-chocs. Vous apprendrez comment fonctionne le capteur de pare-chocs et comment utiliser les capteurs de pare-chocs robotisés VR dans un projet VEXcode VR.
Résultats d'apprentissage
- Identifiez que le capteur de pare-chocs est un type d'interrupteur.
- Identifiez que le capteur de pare-chocs rapporte une valeur de FAUX (relâché) ou de VRAI (pressé).
- Identifiez que le capteur de pare-chocs peut être utilisé pour provoquer une action de robot VR lorsqu'il est pressé ou relâché.
- Identifiez que le <Pressing bumper> bloc est un booléen qui signale si le capteur de pare-chocs est enfoncé.
- Décrivez pourquoi le capteur de pare-chocs serait utilisé dans un projet VEXcode VR.
Capteur de pare-chocs
Le robot VR dispose de deux capteurs de pare-chocs situés à l'avant.
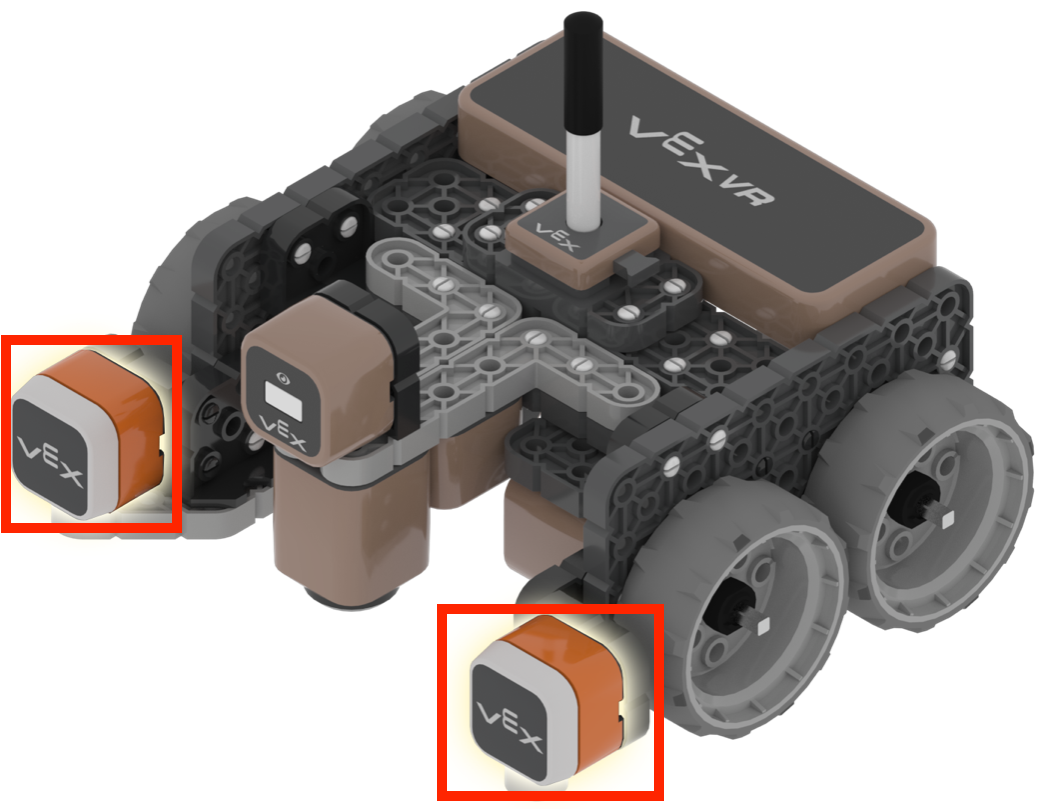
Un capteur de pare-chocs est un commutateur qui signale s'il est enfoncé ou relâché.
- Le capteur de pare-chocs signalera une valeur de capteur de VRAI lorsque le capteur de pare-chocs est enfoncé.
- Le capteur de pare-chocs signalera une valeur de capteur de FAUX lorsque le capteur de pare-chocs est relâché.
Le capteur de pare-chocs est pressé par les murs du labyrinthe mural aire de jeux, ou par les murs extérieurs entourant d'autres aires de jeux.

Le capteur de pare-chocs est utilisé pour déterminer si le robot VR touche un objet ou un mur. Utilisez le <Pressing bumper> bloc dans un projet VEXcode VR pour vérifier l'état du capteur de pare-chocs.
Lisez l'article Bumper Sensor - Robot Features - VEX VR pour obtenir des informations détaillées sur le fonctionnement du capteur de pare-chocs.
<Pressing bumper> Bloc
<Pressing bumper> est un bloc reporter booléen. Il indique VRAI si le pare-chocs est enfoncé, et FAUX s'il n'est pas enfoncé.

Utilisation des blocs de commutation
Il s'agit du <Bumper pressed> bloc de commutation.

Le <Pressing bumper> bloc est utilisé avec les blocs de la catégorie Contrôle qui accepte les blocs booléens hexagonaux.
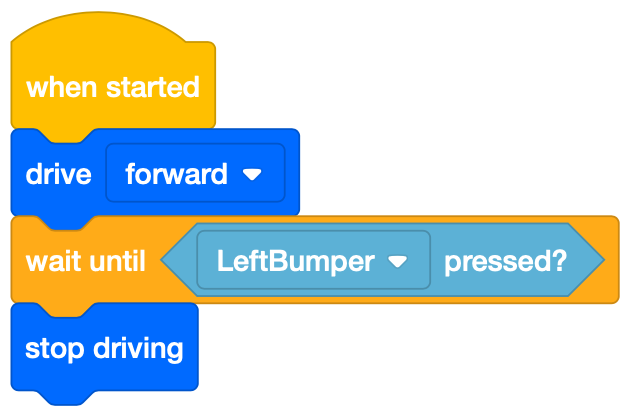
Dans l'exemple suivant, le robot VR avancera jusqu'à ce que le pare-chocs gauche soit enfoncé. Une fois que le pare-chocs gauche est enfoncé, le robot VR arrête de conduire.
Appliquer
Les capteurs sont essentiels à la robotique. Pour qu'un robot VR soit vraiment considéré comme un robot, il doit être capable de détecter et d'interagir avec son environnement. Ceci est communément appelé la boucle de décision Sense → Think → Act.
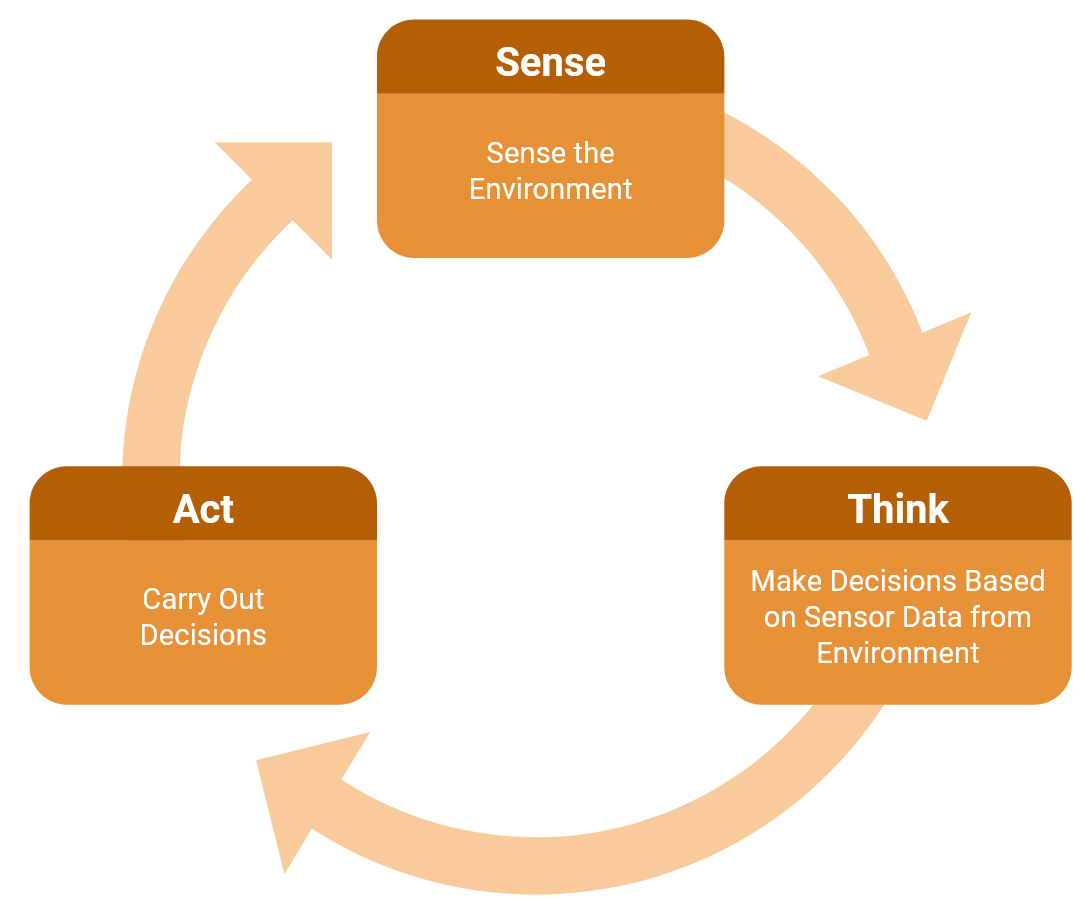
Un robot VR utilise des capteurs pour collecter des données de son environnement (Sense), prendre des décisions en fonction de ces informations (Think) et transformer ces informations en instructions de comportements (Act).
Les capteurs permettent à un robot VR d'interagir avec son environnement et permettent à l'utilisateur de créer des projets plus dynamiques. Ces projets dynamiques nécessitent un robot VR pour interagir et répondre aux environnements changeants.
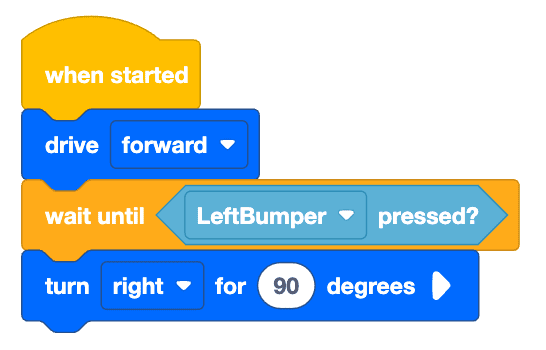
Dans cette unité, vous découvrirez le capteur de pare-chocs, un capteur capable de détecter un contact physique. Le capteur de pare-chocs est utilisé pour informer un robot VR lorsqu'il a été en contact avec un objet ou un mur. Un robot VR peut ensuite utiliser les informations rapportées par le capteur de pare-chocs gauche pour prendre des décisions. Dans l'exemple ci-dessous, le robot VR avancera, puis effectuera un virage à droite de 90 degrés après avoir appuyé sur le capteur de pare-chocs gauche, détectant ainsi le contact avec un objet ou un mur.
Questions
Veuillez sélectionner un lien ci-dessous pour accéder au questionnaire de la leçon.
Google Doc / .docx / .pdf