
Lektion 1: Was ist ein Stoßfängersensor?
In dieser Lektion erfahren Sie, was ein Sensor ist und warum Sie Sensoren mit einem VR-Roboter verwenden würden. Der erste Sensor, den Sie kennenlernen werden, ist der Stoßfängersensor. Sie erfahren, wie der Stoßfängersensor funktioniert und wie Sie die VR-Roboterstoßfängersensoren in einem VEXcode VR-Projekt verwenden.
Lernergebnisse
- Stellen Sie fest, dass der Stoßfängersensor eine Art Schalter ist.
- Stellen Sie sicher, dass der Stoßstangensensor einen Wert von entweder FALSE (freigegeben) oder TRUE (gedrückt) meldet.
- Stellen Sie fest, dass der Stoßstangensensor verwendet werden kann, um eine VR-Roboteraktion zu verursachen, wenn er gedrückt oder losgelassen wird.
- Stellen Sie fest, dass es sich bei dem <Pressing bumper> Block um einen Booleschen Wert handelt, der meldet, wenn der Stoßfängersensor gedrückt wird.
- Beschreiben Sie, warum der Stoßfängersensor in einem VEXcode VR-Projekt verwendet wird.
Stoßfängersensor
Der VR-Roboter verfügt über zwei Stoßfängersensoren an der Vorderseite.
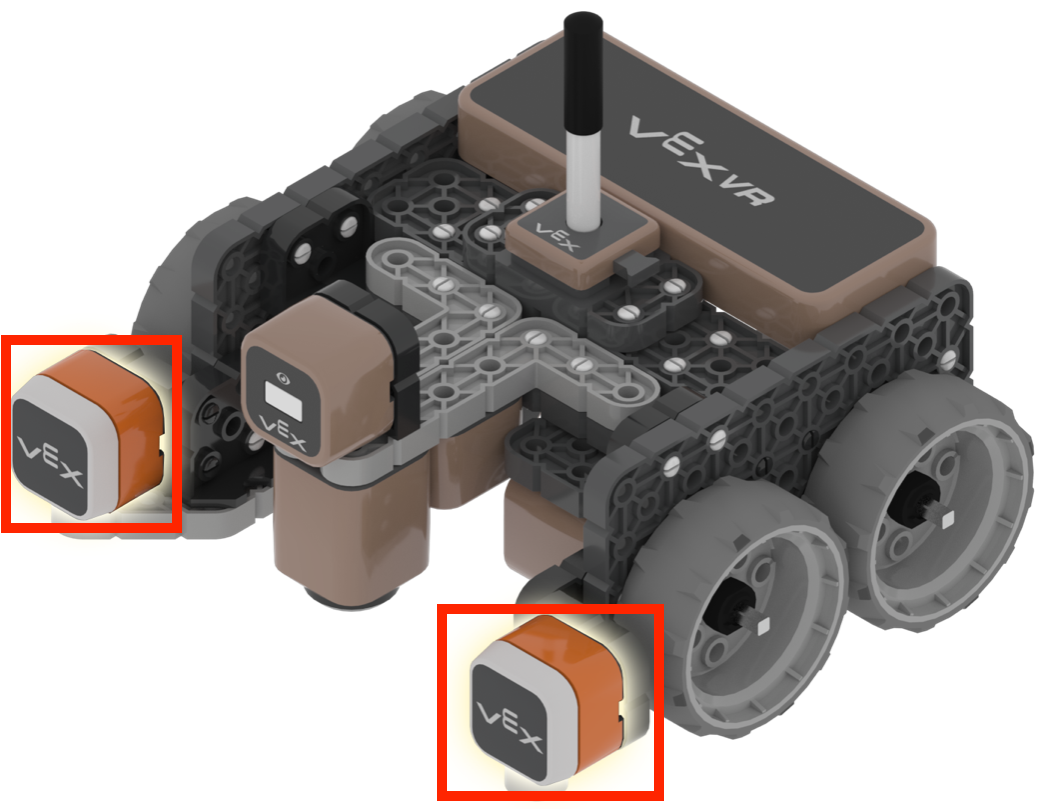
Ein Stoßfängersensor ist ein Schalter, der meldet, ob er gedrückt oder losgelassen wird.
- Der Stoßfängersensor meldet einen Sensorwert von TRUE, wenn der Stoßfängersensor gedrückt wird.
- Der Stoßfängersensor meldet einen Sensorwert von FALSE, wenn der Stoßfängersensor losgelassen wird.
Der Stoßfängersensor wird von Wänden im Wandlabyrinth-Spielplatz oder von den Außenwänden, die andere Spielplätze umgeben, gedrückt.

Der Stoßfängersensor wird verwendet, um festzustellen, ob der VR-Roboter ein Objekt oder eine Wand berührt. Verwenden Sie den <Pressing bumper> Block in einem VEXcode VR-Projekt, um den Zustand des Stoßfängersensors zu überprüfen.
Lesen Sie den Artikel Stoßfängersensor - Roboterfunktionen - vex VR, um detaillierte Informationen zur Funktionsweise des Stoßfängersensors zu erhalten.
<Pressing bumper> Block
<Pressing bumper> ist ein boolescher Reporterblock. Es meldet WAHR, wenn der Stoßfänger gedrückt wird, und FALSCH, wenn er nicht gedrückt wird.

Verwenden von Schalterblöcken
Dies ist der <Bumper pressed> Schalterblock.

Der <Pressing bumper> Block wird mit Blöcken aus der Steuerungskategorie verwendet, die hexagonale Boolesche Blöcke akzeptieren.
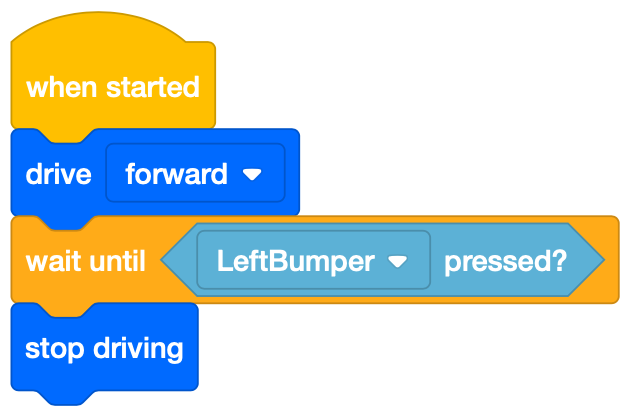
Im folgenden Beispiel fährt der VR-Roboter vorwärts, bis der linke Stoßfänger gedrückt wird. Sobald der linke Stoßfänger gedrückt wird, stoppt der VR-Roboter die Fahrt.
Anwenden
Sensoren sind für die Robotik unerlässlich. Damit ein VR-Roboter wirklich als Roboter betrachtet werden kann, muss er in der Lage sein, seine Umgebung zu erfassen und mit ihr zu interagieren. Dies wird gemeinhin als Sense → Think → Act-Entscheidungsschleife bezeichnet.

Ein VR-Roboter verwendet Sensoren, um Daten aus seiner Umgebung zu sammeln (Sense), Entscheidungen auf der Grundlage dieser Informationen zu treffen (Think) und diese Informationen in Anweisungen für Verhaltensweisen umzuwandeln (Act).
Sensoren ermöglichen es einem VR-Roboter, mit seiner Umgebung zu interagieren, und ermöglichen es dem Benutzer, dynamischere Projekte zu erstellen. Diese dynamischen Projekte erfordern einen VR-Roboter, um mit sich ändernden Umgebungen zu interagieren und darauf zu reagieren.
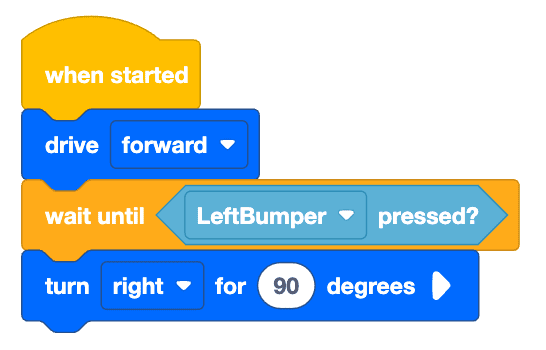
In diesem Gerät werden Sie mit dem Stoßstangensensor vertraut gemacht, einem Sensor, der physischen Kontakt erkennen kann. Der Stoßfängersensor wird verwendet, um einen VR-Roboter zu informieren, wenn er mit einem Objekt oder einer Wand in Kontakt gekommen ist. Ein VR-Roboter kann dann die gemeldeten Informationen des linken Stoßfängersensors verwenden, um Entscheidungen zu treffen. Im folgenden Beispiel fährt der VR-Roboter vorwärts und macht dann eine 90-Grad-Rechtskurve, nachdem der linke Stoßfängersensor gedrückt wurde, um den Kontakt mit einem Objekt oder einer Wand zu erkennen.
Fragen
Bitte wählen Sie unten einen Link aus, um auf das Lektionsquiz zuzugreifen.
Google Doc / .docx / .pdf