
Zavedení
V této lekci se dozvíte o senzoru vzdálenosti a o tom, jak lze data ze senzoru vzdálenosti použít v projektu k detekci objektů. Také se dozvíte o bloku [Wait until] a o tom, jak jej lze použít v projektu VEXcode EXP k tomu, aby váš robot učinil rozhodnutí. Poté v rámci výzvy Sense and Sweep využijete své znalosti k detekci a přesunu Buckyballů pomocí BaseBota. Podívejte se na animaci níže a uvidíte jeden ze způsobů, jakým se BaseBot může pohybovat, aby otočil, detekoval a vyčistil každou kostku z pole.
Přidat senzor vzdálenosti
V této lekci se dozvíte o senzoru vzdálenosti a o tom, jak můžete naprogramovat robota pomocí zpětné vazby ze senzoru.
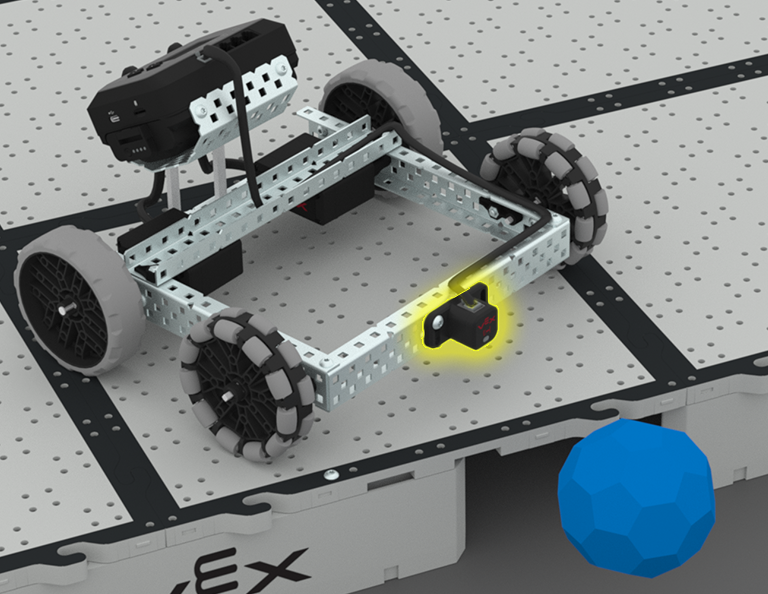
Přidejte k BaseBotu senzor vzdálenosti, jak je znázorněno na tomto obrázku.
- Přidejte C-kanál o rozměrech 1x2x1x16 na přední stranu BaseBota.
- Poté namontujte senzor vzdálenosti na C-kanálu, jak je znázorněno na obrázku.
- Snímač vzdálenosti by měl být zapojen do portu 5.
Vyberte< Zpět k lekcímpro návrat do přehledu lekcí.
VyberteDalší > a dozvíte se více o senzoru vzdálenosti a bloku [Čekat do].