
Introduzione
In questa lezione imparerai a conoscere il sensore di distanza e come i dati del sensore di distanza possono essere utilizzati in un progetto per rilevare oggetti. Imparerai anche a conoscere il blocco [Wait until] e come può essere utilizzato in un progetto EXP VEXcode per far prendere una decisione al tuo robot. Quindi, applicherai il tuo apprendimento per rilevare e spostare Buckyballs con il tuo BaseBot nella Sfida Sense and Sweep. Guarda l'animazione qui sotto per vedere un modo in cui il BaseBot potrebbe muoversi per girare, rilevare e cancellare ogni cubo dal Campo.
Aggiungi un sensore di distanza
In questa lezione, imparerai a conoscere il sensore di distanza e come codificare il tuo robot utilizzando il feedback del sensore.
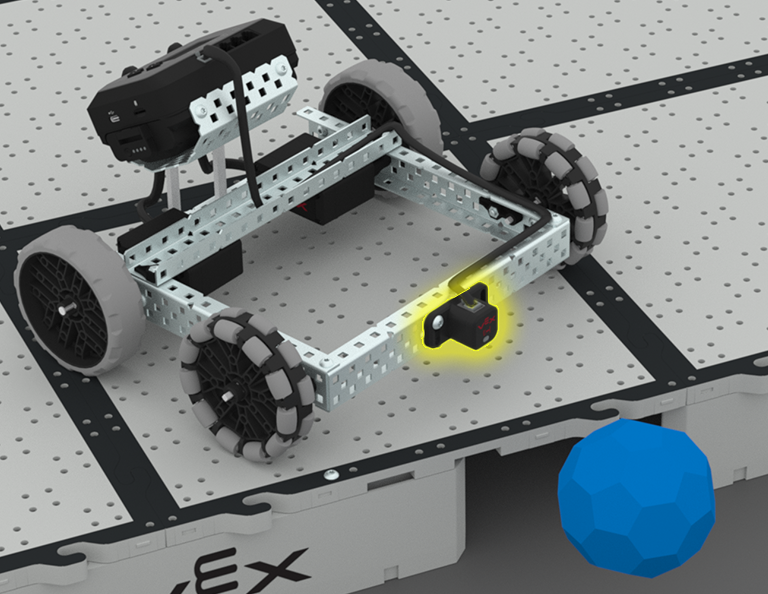
Aggiungi un sensore di distanza al tuo BaseBot come mostrato in questa immagine.
- Aggiungere un canale C 1x2x1x16 nella parte anteriore del BaseBot.
- Quindi, montare il sensore di distanza sul canale C come mostrato nell'immagine.
- Il sensore di distanza deve essere collegato alla porta 5.
Seleziona < Torna alle lezioni per tornare alla panoramica delle lezioni.
Selezionare Avanti > per conoscere il sensore di distanza e il blocco [Attendi fino a].