
Giới thiệu
Trong Bài học này, bạn sẽ tìm hiểu về Cảm biến khoảng cách và cách sử dụng dữ liệu từ Cảm biến khoảng cách trong một dự án để phát hiện vật thể. Bạn cũng sẽ tìm hiểu về khối [Chờ cho đến khi] và cách sử dụng khối này trong dự án VEXcode EXP để robot của bạn đưa ra quyết định. Sau đó, bạn sẽ áp dụng kiến thức đã học để phát hiện và di chuyển Buckyball bằng BaseBot trong Thử thách Cảm nhận và Quét. Hãy xem hình ảnh động bên dưới để biết cách BaseBot có thể di chuyển để xoay, phát hiện và xóa từng khối lập phương khỏi Trường.
Thêm cảm biến khoảng cách
Trong Bài học này, bạn sẽ tìm hiểu về Cảm biến khoảng cách và cách bạn có thể lập trình robot của mình bằng phản hồi cảm biến.
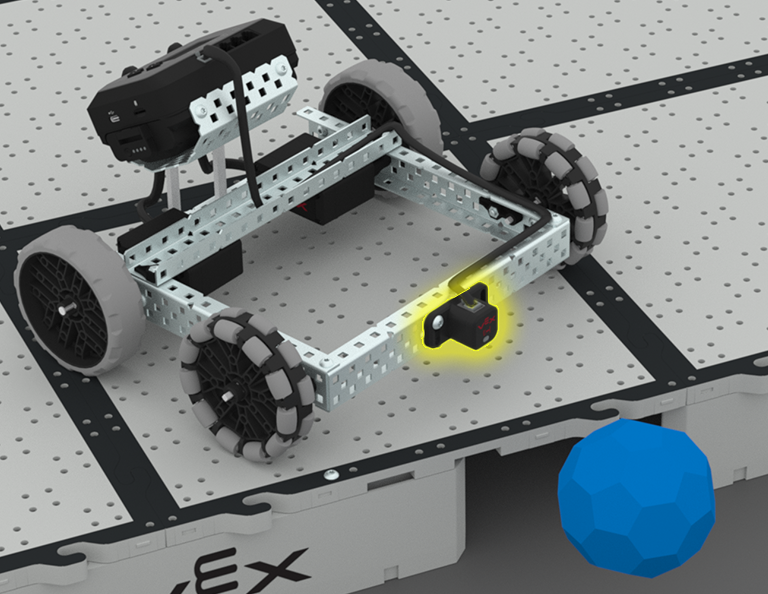
Thêm Cảm biến khoảng cách vào BaseBot như trong hình ảnh này.
- Thêm kênh C 1x2x1x16 vào mặt trước của BaseBot.
- Sau đó, gắn Cảm biến khoảng cách vào Kênh C như trong hình minh họa.
- Cảm biến khoảng cách phải được cắm vào Cổng 5.
Chọn< Quay lại Bài họcđể quay lại Tổng quan về bài học.
ChọnTiếp theo > để tìm hiểu về Cảm biến khoảng cách và khối [Chờ cho đến].