
Einleitung
In dieser Lektion erfahren Sie mehr über den Abstandssensor und wie Daten vom Abstandssensor in einem Projekt verwendet werden können, um Objekte zu erkennen. Sie erfahren auch mehr über den Block [Warten bis] und wie dieser in einem VEXcode EXP-Projekt verwendet werden kann , damit Ihr Roboter eine Entscheidung treffen kann. Dann werden Sie Ihr Lernen anwenden, um Buckyballs mit Ihrem BaseBot in der Sense and Sweep Challenge zu erkennen und zu bewegen. Sehen Sie sich die Animation unten an, um zu sehen, wie sich der BaseBot bewegen kann, um jeden Würfel aus dem Feld zu drehen, zu erkennen und zu entfernen.
Fügen Sie einen Abstandssensor hinzu
In dieser Lektion erfahren Sie mehr über den Abstandssensor und wie Sie Ihren Roboter mithilfe von Sensorfeedback codieren können.
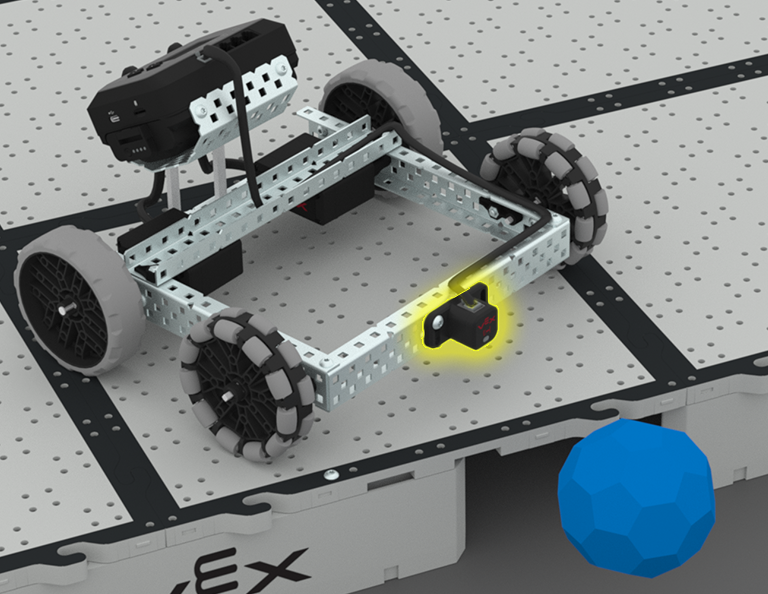
Fügen Sie Ihrem BaseBot einen Abstandssensor hinzu, wie in diesem Bild gezeigt.
- Fügen Sie einen 1x2x1x16 C-Kanal an der Vorderseite des BaseBot hinzu.
- Montieren Sie dann den Abstandssensor am C-Kanal, wie in der Abbildung gezeigt.
- Der Abstandssensor sollte an Port 5 angeschlossen werden.
Wählen Sie < Zurück zu Lektionen, um zur Lektionsübersicht zurückzukehren.
Wählen Sie Weiter > , um mehr über den Abstandssensor und den Block [Warten bis] zu erfahren.