
บทนำ
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางและวิธีใช้ข้อมูล จากเซ็นเซอร์ระยะทางในโครงการเพื่อตรวจจับวัตถุ นอกจากนี้คุณยังจะได้เรียนรู้เกี่ยวกับบล็อก [รอจนกว่า] และวิธีที่สามารถใช้ใน โครงการ VEXcode EXP เพื่อให้หุ่นยนต์ของคุณตัดสินใจ จากนั้นคุณจะใช้การเรียนรู้ของคุณเพื่อตรวจจับและย้ายบัคกี้บอลด้วย BaseBot ของคุณใน Sense and Sweep Challenge ดูภาพเคลื่อนไหวด้านล่างเพื่อดูวิธีหนึ่งที่ BaseBot สามารถเคลื่อนที่เพื่อหมุนตรวจจับและล้างลูกบาศก์แต่ละก้อนออกจากฟิลด์
เพิ่มเซ็นเซอร์ระยะทาง
ในบทเรียนนี้คุณจะได้เรียนรู้เกี่ยวกับเซ็น เซอร์ระยะทางและวิธีที่คุณสามารถเขียนรหัสหุ่นยนต์ของคุณโดยใช้ข้อเสนอแนะจากเซ็นเซอร์
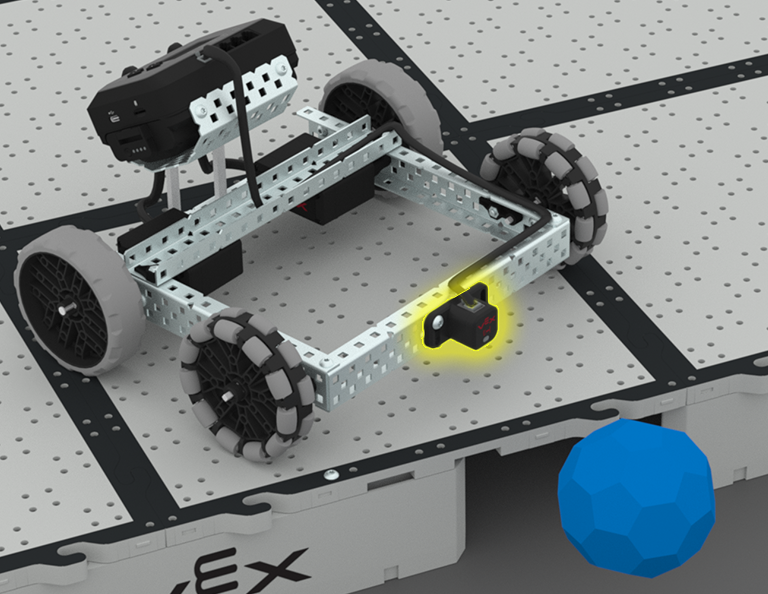
เพิ่มเซ็นเซอร์ระยะทางลงใน BaseBot ของคุณตามที่แสดงในภาพนี้
- เพิ่ม 1x2x1x16 C-Channel ที่ด้านหน้าของ BaseBot
- จากนั้นติดตั้งเซ็นเซอร์ระยะทางเข้ากับช่อง C ตามที่แสดงในภาพ
- ควรเสียบเซ็นเซอร์ระยะทางเข้ากับพอร์ต 5
เลือก < กลับไปที่บทเรียน เพื่อกลับไปที่ภาพรวมของบทเรียน
เลือก ถัดไป > เพื่อเรียนรู้เกี่ยวกับเซ็นเซอร์ระยะทางและบล็อก [รอจนกว่า]