
giriiş
Bu Ders'te Mesafe Sensörü'nü ve Mesafe Sensörü'nden gelen verilerin bir projede nesneleri tespit etmek için nasıl kullanılabileceğini öğreneceksiniz. Ayrıca [Bekle] bloğunu ve bunun bir VEXcode EXP projesinde robotunuzun karar almasını sağlamak için nasıl kullanılabileceğini öğreneceksiniz. Daha sonra öğrendiklerinizi, Sense and Sweep Challenge'da BaseBot'unuzla Buckyball'ları tespit edip hareket ettirmek için uygulayacaksınız. BaseBot'un Alan'daki her küpü döndürmek, tespit etmek ve temizlemek için nasıl hareket edebileceğini görmek için aşağıdaki animasyonu izleyin.
Mesafe Sensörü Ekle
Bu Ders'te Mesafe Sensörü'nü ve sensör geri bildirimini kullanarak robotunuzu nasıl kodlayabileceğinizi öğreneceksiniz.
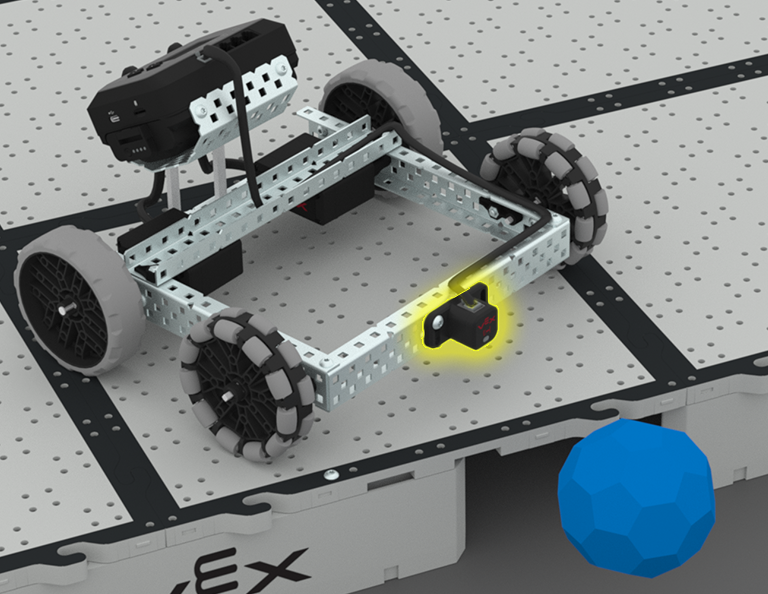
Bu görselde gösterildiği gibi BaseBot'unuza bir Mesafe Sensörü ekleyin.
- BaseBot'un önüne 1x2x1x16 C-Kanalı ekleyin.
- Daha sonra Mesafe Sensörünü resimde görüldüğü gibi C-Kanalı'na monte edin.
- Mesafe Sensörü Port 5'e takılmalıdır.
Ders Genel Bakışına dönmek için< Derslere Dönseçin.
Mesafe Sensörü ve [Bekleme süresi] bloğu hakkında bilgi edinmek içinSonraki > seçin.