
소개
이 수업에서는 거리 센서에 대해 알아보고, 거리 센서에서 수집한 데이터를 프로젝트에서 어떻게 사용하여 객체를 감지할 수 있는지 알아봅니다. 또한 [대기까지] 블록에 대해서도 알아보고, VEXcode EXP 프로젝트에서 로봇이 결정을 내리는 데 이 블록을 어떻게 사용할 수 있는지도 알아보겠습니다. 그런 다음, 학습한 내용을 Sense and Sweep Challenge에서 BaseBot을 사용하여 버키볼을 감지하고 옮기는 데 적용합니다. 아래 애니메이션을 시청하여 BaseBot이 어떻게 움직여 각 큐브를 필드에서 돌리고, 감지하고, 제거하는지 확인하세요.
거리 센서 추가
이 수업에서는 거리 센서에 대해 알아보고, 센서 피드백을 사용하여 로봇을 코딩하는 방법을 알아봅니다.
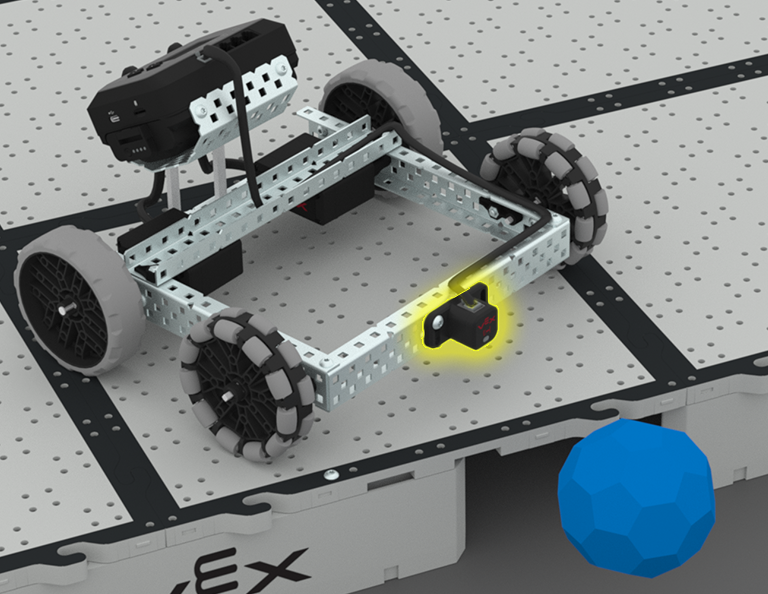
이 이미지에 표시된 대로 BaseBot에 거리 센서를 추가하세요.
- BaseBot 앞쪽에 1x2x1x16 C-채널을 추가합니다.
- 그런 다음, 그림과 같이 거리 센서를 C채널에 장착합니다.
- 거리 센서는 포트 5에 연결해야 합니다.
수업 개요로 돌아가려면< 수업로 돌아가기를 선택하세요.
거리 센서와 [대기 시간] 블록에 대해 알아보려면다음 > 선택하세요.