
Invoering
In deze les leert u over de afstandssensor en hoe gegevens van de afstandssensor in een project kunnen worden gebruikt om objecten te detecteren. U leert ook over het [Wacht tot]-blok en hoe u dat in een VEXcode EXP-project kunt gebruiken om uw robot een beslissing te laten nemen. Vervolgens ga je wat je hebt geleerd in de Sense and Sweep Challenge toepassen om Buckyballs te detecteren en te verplaatsen met je BaseBot. Bekijk de onderstaande animatie om te zien op welke manier de BaseBot kan bewegen om elke kubus te draaien, te detecteren en van het veld te verwijderen.
Voeg een afstandssensor toe
In deze les leert u over de afstandssensor en hoe u uw robot kunt programmeren met behulp van sensorfeedback.
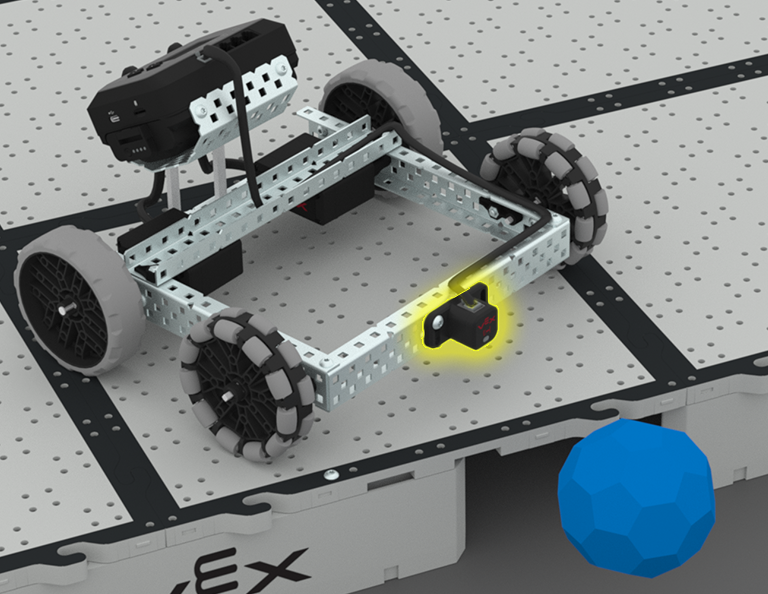
Voeg een afstandssensor toe aan uw BaseBot zoals weergegeven in deze afbeelding.
- Voeg een 1x2x1x16 C-kanaal toe aan de voorkant van de BaseBot.
- Bevestig vervolgens de afstandssensor aan het C-kanaal zoals weergegeven in de afbeelding.
- De afstandssensor moet op poort 5 worden aangesloten.
Selecteer< Terug naar lesom terug te keren naar het lesoverzicht.
SelecteerVolgende > om meer te weten te komen over de afstandssensor en het blok [Wachten tot].