
Introduction
Dans cette leçon, vous en apprendrez plus sur le capteur de distance et sur la façon dont les données du capteur de distance peuvent être utilisées dans un projet pour détecter des objets. Vous en apprendrez également plus sur le bloc [Attendre jusqu'à], et comment cela peut être utilisé dans un projet VEXcode EXP pour que votre robot prenne une décision. Ensuite, vous appliquerez votre apprentissage pour détecter et déplacer des Buckyballs avec votre BaseBot dans le défi Sens et balayage. Regardez l'animation ci-dessous pour voir une façon dont le BaseBot pourrait se déplacer pour tourner, détecter et effacer chaque cube du champ.
Ajouter un capteur de distance
Dans cette leçon, vous en apprendrez plus sur le capteur de distance et sur la façon dont vous pouvez coder votre robot en utilisant les commentaires du capteur.
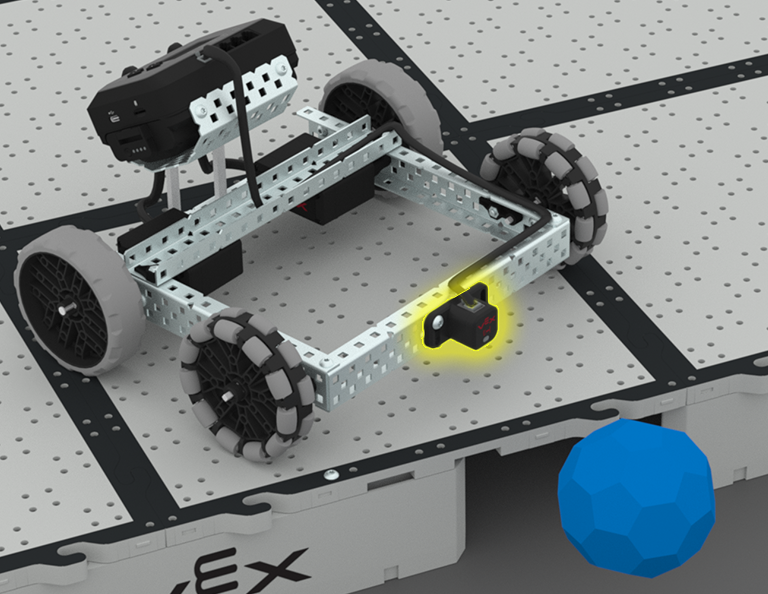
Ajoutez un capteur de distance à votre BaseBot comme indiqué dans cette image.
- Ajoutez un canal en C 1x2x1x16 à l'avant du BaseBot.
- Ensuite, montez le capteur de distance sur le canal C comme indiqué dans l'image.
- Le capteur de distance doit être branché sur le port 5.
Sélectionnez < Retour aux leçons pour revenir à l'aperçu de la leçon.
Sélectionnez Suivant > pour en savoir plus sur le capteur de distance et le bloc [Attendre jusqu'à].