
Introducción
En esta lección aprenderá sobre el sensor de distancia y cómo se pueden usar los datos del sensor de distancia en un proyecto para detectar objetos. También aprenderá sobre el bloque [Esperar hasta] y cómo se puede usar en un proyecto VEXcode EXP para que su robot tome una decisión. Luego, aplicarás tu aprendizaje para detectar y mover Buckyballs con tu BaseBot en el Sense and Sweep Challenge. Mira la animación a continuación para ver una forma en que el BaseBot podría moverse para girar, detectar y borrar cada cubo del Campo.
Añadir un sensor de distancia
En esta lección, aprenderá sobre el sensor de distancia y cómo puede codificar su robot utilizando la retroalimentación del sensor.
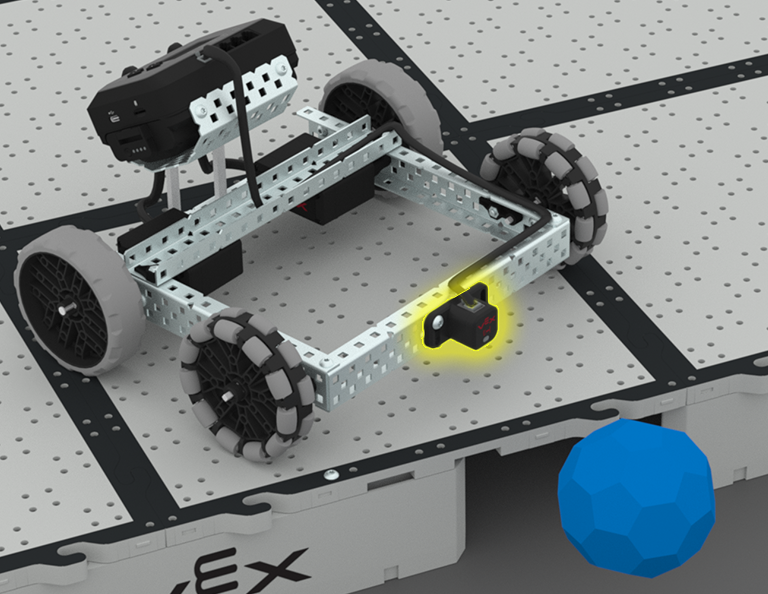
Añade un sensor de distancia a tu BaseBot como se muestra en esta imagen.
- Añada un canal C de 1x2x1x16 a la parte delantera del BaseBot.
- A continuación, monte el sensor de distancia en el canal C como se muestra en la imagen.
- El sensor de distancia debe estar conectado al puerto 5.
Seleccione < Volver a las lecciones para volver a la descripción general de la lección.
Seleccione Siguiente > para obtener información sobre el sensor de distancia y el bloque [Esperar hasta].