
Wetteifern
Nachdem Sie nun gelernt haben, wie Sie Ihren Roboter mit Fahrersteuerungen bewegen, und verschiedene Fahrersteuerungskonfigurationen getestet haben, sind Sie bereit für die Geschwindigkeits- und Punkte-Herausforderung.
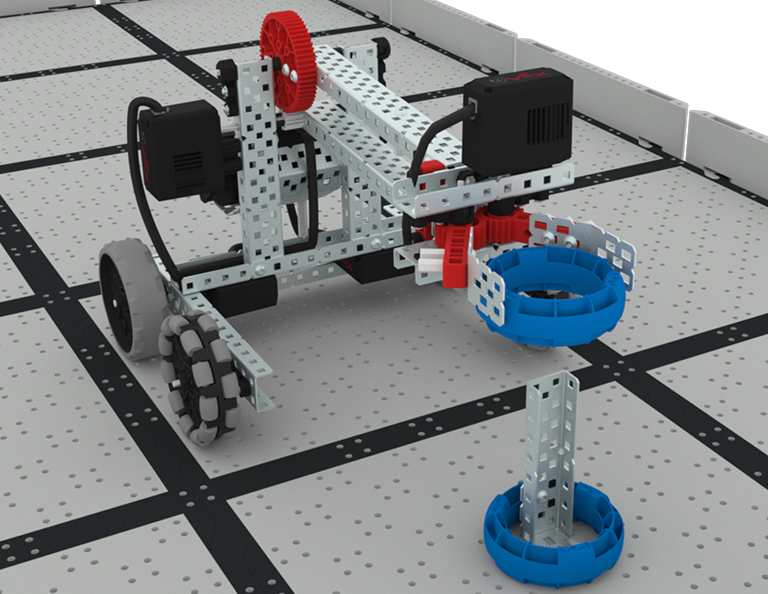
Das Ziel dieser Herausforderung besteht darin, Ihren Roboter so zu steuern, dass er in der schnellstmöglichen Zeit beide Ringe am kleinen Pfosten auf dem Spielfeld greift und erzielt. Die folgende Animation zeigt, wie das Feld aufgebaut sein sollte, und eine mögliche Art, beide Ringe anzufahren und zu punkten. Der Roboter, der am schnellsten beide Ringe erreicht, gewinnt.
Befolgen Sie die Schritte in diesem Dokument, um die Speed and Score-Herausforderung abzuschließen. Google / .docx / .pdf
Wenn Sie die Geschwindigkeits- und Punkte-Herausforderung abgeschlossen haben, melden Sie sich bei Ihrem Lehrer. Stellen Sie sicher, dass Sie die Ergebnisse der Herausforderung in Ihrem technischen Notizbuch dokumentiert haben.
Im Video unten befindet sich der Clawbot auf der linken Seite des Feldes. Auf dem Feld befinden sich zwei Ringe: einer befindet sich oben auf dem Feld, zwischen dem zweiten und dritten Plättchen, und ein weiterer unten auf dem Feld, ebenfalls zwischen dem zweiten und dritten Plättchen. In der Mitte des Feldes, auf der rechten Seite, steht ein einzelner Pfosten. Das Video beginnt mit einem Countdown: 3, 2, 1. Der Clawbot fährt zur zweiten und dritten Kachel und bewegt sich dann nach oben zum ersten Ring, den er aufhebt. Dann hebt es die Klaue und geht rückwärts. Anschließend fährt er zum Pfosten und lässt die Klaue los, sodass der Ring auf den Pfosten fällt. Anschließend fährt der Clawbot zurück und senkt die Klaue. Dann fährt er zum zweiten Ring am unteren Ende des Feldes, nimmt ihn auf, dreht sich und fährt zum Pfosten. Der Clawbot lässt die Klaue los und der Ring fällt auf den Pfosten. Der Timer stoppt an diesem Punkt, da die Herausforderung nun abgeschlossen ist und 21,22 Sekunden anzeigt.
Abschlussreflexion
Nachdem Sie nun eine Strategie entwickelt und an der Speed and Score Challenge teilgenommen haben, ist es an der Zeit, darüber nachzudenken, was Sie in dieser Lektion gelernt und getan haben. Beginnen Sie mit einer neuen Seite in Ihrem technischen Notizbuch, um mit Ihrer Reflexion zu beginnen.
Bewerten Sie sich in Ihrem technischen Notizbuch hinsichtlich der folgenden Konzepte als Anfänger, Lehrling oder Experte. Geben Sie eine kurze Begründung dafür ab, warum Sie sich für jedes Konzept diese Bewertung gegeben haben:
- So passen Sie das Driver Control-Programm optimal an Ihre Fahrbedürfnisse und -fähigkeiten an
- Auswahl einer Treibersteuerungskonfiguration, die es mir ermöglicht, Klaue und Arm effizient zum Einkerben von Ringen zu verwenden
- Gemeinsam mit meinem Team entwickle ich eine Fahrstrategie, um schneller Ringe zu erzielen
Mithilfe dieser Tabelle können Sie feststellen, in welche Kategorie Sie fallen.
| Experte | Ich habe das Gefühl, dass ich das Konzept vollständig verstanden habe und es jemand anderem beibringen könnte. |
| Lehrling | Ich habe das Gefühl, dass ich das Konzept ausreichend verstanden habe, um an der Herausforderung teilzunehmen. |
| Anfänger | Ich habe das Gefühl, dass ich das Konzept nicht verstanden habe und nicht weiß, wie ich die Herausforderung bewältigen soll. |
Wie geht es weiter?
In dieser Lektion haben Sie gelernt, wie Sie Ihren Roboter mithilfe der Fahrersteuerung bewegen, damit er Ringe effektiver aufnimmt und wertet. Anschließend hast du an der Speed and Score Challenge teilgenommen. In der nächsten Lektion werden Sie:
- Erfahren Sie mehr über die Kodierung autonomer Bewegungen
- Planen Sie einen Pfad und programmieren Sie Ihren Roboter so, dass er sich autonom bewegt
- Nehmen Sie an der Coding Crunch Challenge teil!
Wählen Sie < Zurück zu Lektionen um zur Lektionsübersicht zurückzukehren.
Wählen Sie Nächste Lektion > um mit Lektion 3 fortzufahren und mehr über die Kodierung autonomer Bewegungen zu erfahren.